Smalltim OSD and autopilot (часть 1)

Возникла такая проблема:
откалибровал датчик тока по инструкции в КП,
При калибровке надо полностью отключить силовой акк от разъёма к регу.😁
Коль уж нарисовался здесь с вопросами, то отчитаюсь о “работе над ошибками” 😌…
Установил рекомендованные программы (FLIP и Net…3.5) на рабочий (в смысле - в офисе) компьютер - все заработало как надо 😛!
Единственное, что обеспокоило (правда, к АП это не относится) - скачал NetFramework 3.5 (237 МБ), запустил установку, а программа установки снова полезла в сеть и скачала еще 65 МБ 😵!? На работе-то мне пофиг (интернет хороший и халявный 😉), а вот дома не хотелось бы докачивать…
Мож кто знает - это можно “обойти”?
При калибровке лучше полностью отключить выход датчика тока.
отключено было при калибровке, проделал и так и эдок, все время показывает 24,9 А. Бывает и 0 показывает, но мАч наматывать начинает при старте телеметрии
отключено было при калибровке, проделал и так и эдок, все время показывает 24,9 А. Бывает и 0 показывает, но мАч наматывать начинает при старте телеметрии
Это характерно при неоткалиброванном датчике. Ни чего не делаешь, а ток бежит на глазах… Потом происходит переполнение и он фиксируется на максималке.
На всякий случай спрошу, а после калибровки кнопу “Завершить и записать” тыкали? И проверьте подключение разъемчика к телеметрии на предмет перевертыша или подключения другого датчика. 😎 Так тоже бывало…
кнопку тыкал.
По картинке правильно втыкал, может картинка неверна (в чем я сомневаюсь). Датчик на своем месте, эт точно.
Опробую все варианты еще раз, может что-то упустил
… В Средиземном море?!, огромных размеров и прямыми линиями.
В логе десятичная запятая. Переделал, лежит тут .
Если в логе используется десятичная ЗАПЯТАЯ, то запускать так: smt2kml.exe -r log1_ru.log -o log1.kml
если десятичная ТОЧКА, то: smt2kml.exe -t log1.log -o log1.kml
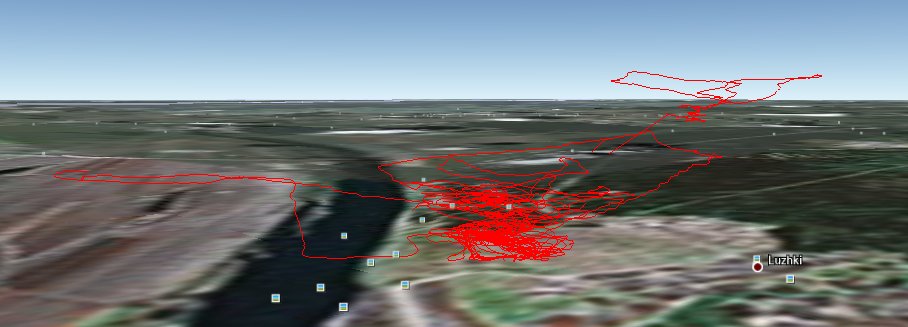
Из файла 1800.log получилась такая картинка
Теперь не должно быть Err’ов на экране.
Михаил,
пожалуйста, посмотрите в Контрольной Панели на странице Телеметрия - Настройки датчиков и входов - Мониторинг датчиков телеметрии
Канал 6, датчик тока, при подключенном датчике тока должен показывать в районе 32700, и смещение примерно так же. Смещение как раз и устанавливается при калибровке.
Эээ. Михаил, прошивка в телеметрии - точно автопилотная?
Из файла 1800.log получилась такая картинка
Смог повторить. Прикольно и полезно, спасибо!
Михаил,
пожалуйста, посмотрите в Контрольной Панели на странице Телеметрия - Настройки датчиков и входов - Мониторинг датчиков телеметрии
Канал 6, датчик тока, при подключенном датчике тока должен показывать в районе 32700, и смещение примерно так же. Смещение как раз и устанавливается при калибровке.Эээ. Михаил, прошивка в телеметрии - точно автопилотная?
271я с сайта, ок вечером проверю
271я с сайта, ок вечером проверю
Михаил, поставь прошивку 3.2.5 для работы с АП:
www.4shared.com/file/…/telemetry_gen3_2_5.html
271я и т.д. - это для работы телеметрии независимо от АП.
У меня и АП может работать без телеметрии, и телеметрия без АП. ЗдОрово, но для телеметрии в таком случае нужны разные прошивки. Некоторые, как ты, путаются 😃
В логе десятичная запятая. Переделал, .
Спасибо! Всё отлично работает!!! Здорово, когда можно посмотреть весь полёт сверху и сразу!
Вот в нормальном качестве нарезка
Обратил внимание, что в устоявшемся полете высота баро и GPS почти совпадают.
Михаил, поставь прошивку 3.2.5 для работы с АП:
www.4shared.com/file/…/telemetry_gen3_2_5.html271я и т.д. - это для работы телеметрии независимо от АП.
У меня и АП может работать без телеметрии, и телеметрия без АП. ЗдОрово, но для телеметрии в таком случае нужны разные прошивки. Некоторые, как ты, путаются 😃
надо пометить на сайте!
Вот в нормальном качестве нарезка
Готовый рекламный ролик для SmallTim автопилота (и камеры GoPro). Даже такие нереализованные еще возможности, как автоматическая посадка, демонстрируются. 😃
Даже такие нереализованные еще возможности, как автоматическая посадка, демонстрируются. 😃
Не, здесь все было намного прикольней! 😁
Когда я подвел самик к месту посадки с выпитой до дна батарейкой, то что-то меня дернуло подвернуть патчик на ощупь… В итоге антенна свалилась со штатива, по пути выдергивая все шнурочки. Остался только хвостик в miniDV-шной камере, но попытки пристроиться к ее окуляру не удались. В итоге плюнул, отложил пульт, снял очки и начал все свои монатки собирать заново. Закончил как раз к моменту посадки. По этому последние 10м высоты я сам рулил:).
Хотя, можно было просто подождать и потом сходить за самиком.
А вот вечером я несколько понизил чувствительность по крену и там полетушки намного ровнее получились. РОлик подготовлю позднее.
Такая же фигня с датчиком тока, показывает 24.9А
Телеметрия первой версии.
Такая же фигня с датчиком тока, показывает 24.9А
Телеметрия первой версии.
поставил прошивку 3.2.5 для работы с АП и все стало гуд., откалибровалось.
Только еще одно замечание, на картинке распиновки АП на сайте, входы и выходы перепутаны слоями.
И еще при OSD+АП gps датчик надо втыкать в АП!!!
Да я тоже разобрался. Надо было откалибровать. Вот что значит не менять прошивку целый год… сколько всего нового появилось. При чем в инструкции для старой платы инфы про калибровку нет 😦
Андрей, а увас микрофон же должен работать в камере, зачем вы звук обрезаете, ведь нам послушать как АП работает мотором очень полезно… Ведь его же можно тихоньку пустить в фоне за музыкой и не мешает и слышно…
Предложение.
На видео обратил, АП чуть не завалил пару раз самик почти перед землей.
Предлагаю ввести запрет на положительные тангажи для АП при токах стремящихся к 0 ?
Андрей, а увас микрофон же должен работать в камере, зачем вы звук обрезаете, ведь нам послушать как АП работает мотором очень полезно… Ведь его же можно тихоньку пустить в фоне за музыкой и не мешает и слышно…
Предложение.
На видео обратил, АП чуть не завалил пару раз самик почти перед землей.
Предлагаю ввести запрет на положительные тангажи для АП при токах стремящихся к 0 ?
Интершум оставлен, только приглушен на 50%. Просто долина уж больно громкая…😃
Режим аварийной посадки при сдохшей батарейке Тимофей обещал прорисовать.
в нормальном качестве нарезка
Забавно. На 2:55 заметно, как проваливается связь при резком повороте и идет потеря спутников. Из за чего АП начинает вращаться на месте. 😃