Огни визуальной индикации глиссады. Идеи?

По логу от планера DG1000 из другой темы - две посадки:
первая плохо считается (за 10м. до касания подбросило на 2м.),
вторая - длинна глиссады 100м, наклон 4.7град, углы раскрытия в ширину 8град, в
высоту 1.5град.
А впишутся ли “не планеры” в 5град.?
Эээ господа, если вы говорите про две посадки именно моего dg1000 то должен вас предупредить что е!то уже был не планер а тяжелый бомбордировщик и посадки были при сильном ветре, больше 10 м/с
Логи посадок можно взять у Тима если он их еще не удалил
www.dealextreme.com/details.dx/sku.28907
Лазер это конечно клево! Но во первых, это не безопасно для окружающих во вторых у нас тут самолеты летають. А если вы помните не так давно был инцидент с лазером и самиком, когда ослепили пилота…
Так вроде бы речь идет о расфокусированном пучке света? Какая тут опасность может быть? Надо будет поиграться с ДВД лазером, посмотреть,что получается.
Эээ господа, если вы говорите про две посадки именно моего dg1000 …
Логи отсюда
да все верно
www.rcgroups.com/forums/showpost.php?p=13557296&po…
Один норг демонстрирует свою систему наведения,сюжет малость динамичный,но что-то понять можно.Может поможет.
Это было больше похоже на кусовое навидение
Что то я смотрел, и ничего не понял… 😕
Испытания не состоялись, погода никчерту 😦
Не растраивайся Андрей! у нас на севере тож ветрило с снежными зарядами, почти две недели в окно смотрю на сугробы
Андрей а может не париться, выложить на снегу две елочные гирлянды, поставить их в одинаковый режим мигания и заснять такую красоту? проблема только в питании этих гирлянд
Мне бы еще снегу найти 😃 А гирлянды уже сеть. 40м
Андрей а может не париться, выложить на снегу две елочные гирлянды, поставить их в одинаковый режим мигания и заснять такую красоту? проблема только в питании этих гирлянд
вапще никаких проблем в гирлянде всего две нитки ламп подключяй ка хочеш(эт если мы про дюралайт говорим) мигает не так поменяй на одной верёвке крайние провода местами и вопрос решон😆
Мне бы еще снегу найти 😃 А гирлянды уже сеть. 40м
приезжай к нам на полярный круг у нас его уже пално на снегоходах народ в полный рост гоняет😝
Во, поизвращался 😃
Красненький и зелененький светодиод нужно будет заменить на моргалки. (в самом начале справа видно зеленый, это он от пола отражается, по нормальному его не должно быть видно до уровня Too Low)
А коробочки переделать в конические, иначе у плоских слишком большое отражение от стенок, даже покрашенных в черный матовый 😦
прикольненько получилось, давай в поле!
Как только потеплеет!
Девайсы переделаны на конусы, теперь вне зоны луча они практически не светятся.
планера я думаю тоже лучше затормозить элеронами вверх и тянуть по глиссаде на моторе.
Не, настоящие планеры не так садяться. Там, когда глиссаду выдерживаешь, орудуешь спойлером. Т.е. выдвигаешь - убраешь. Модели - по аналогии, должны работать спойлером, при его отсутствии - крокодилом (бабочкой). Другого пути нет, иначе планер будет или разгоняться, что опасно, или сваливаться, что еще опаснее.
На моделях без возможности сделать крокодил (металки например), тормоз делают просто флапперонами, компенсируя тангаж микшером на РВ ( Ох и геморно его настраивать 😦 )
А если ближе к теме - то есть еще идейка. Можно ведь обычный дешевый строительный уровень на эту самую глиссадную доску присобачить. Или уже говорили, да я недосмотрел?
Не, доски не будет. Слишком огромная она получается 😃 Просто каждый устанавливается отдельно, настройка занимает мах. 5мин на все.
Да, если у планеров есть спойлеры то ими и тормозят, а если их нет то выгоднее использовать не флапероны, а элероны вверх (те же сопойлеры) которые не ухудшают управляемость.
Пока читал ветку посетила идея системы автоматической посадки:
На посадочной полосе устанавливаются три светодиода(минимум, можно больше) без какого-либо существенного разнесения, но ориентированные так, что максимумы их диаграммы направленности образуют пространственный равносторонний треугольник, при этом не обязательно добиваться непересечения их секторов освещения. Каждый из светодиодов синхронно модулируется ортогональной кодовой последовательностью, например функциями Уолша.
На борту ставится приёмник ИК излучения, например от телевизора, с простейшей оптикой. Выход приёмника подключается к АЦП микроконтроллера.
Бортовое ПО состоит из трёх синхронных цифорвых корреляторов, демодулирующих принимаемый сигнал и разделяющий его на компоненты, соответствующие каждому светодиоду на передающей стороне. Из разности интенсивности каждого из сигналов вычисляется ошибка по каналам высоты и направления, которая в дальнейшем может быть отображена OSD или использована автопилотом для посадки. При битовой частоте передачи около 1 кГц возможна полностью программная демодуляция с использованием простеньких AVR-ок
По сути это оптическая версия курсо-глиссандной системы автоматического захода на посадку.(ru.wikipedia.org/wiki/Курсо-глиссадная_система)
Пытался вьехать в написанное…
В общем предлагается заменить радио маяки на световые и если я правильно понял то потребуются светодиоды с равномерным лепестком. Тоесть что бы яркость убывала от центра к краю убывала равномерно?
И почему не обязательно
добиваться непересечения их секторов освещения.
???
Ведь ели ориентация работает на срвнении интенсивности (яркости) то лучи должны быть сориентированы соответствующим образом?
Поясните свою идею пожалуйста.
А вообще заменчиво, можно бы было пользоваться даже днем в составе с телеметрией !
почему можно не добиваться пересечения секторов освещения?

Вот две иллюстрации - слева два светодиода с узкой диаграммаой направленности установленные под углом -10/+10 градусов (синяя и красная кривая). Зелёная кривая - отношение интенсивности “синего” светодиода к сумме “синего” и “красного”. Видно, что она информативна лишь в области -5…+5 градусов, тоесть какраз в той области, где пересекаются их диаграммы освещения.
Справа - два светодиода расположены также, но их диаграмма направленности существенно менее острая. Зелёная кривая уже информативна в области -20…20 град, зато наблюдается потеря линейности, что, как правило, не страшно.
Вывод:
-
чтобы система работала с большим диаппазоном углов - необходимо использовать менее направленные светодиоды и, наоборот, для более точного нахождения нуля(требуемого направления) нужны более узконаправленные светодиоды.
-
принципиально неважно, чтобы диаграмма направленности была какой-либо специальной формы(равномерная, линейная и т.п.)😉 - при построении рисунка, я использовал,например, гауссову функцию, что обычно имеет место быть в реальных светодиодах.
В том то все и дело что сейчас вы рассматриваете все с чисто математической точки зрения и тут все верно.
А теперь взгляните на ваш первый рисунок. И представьте что самоелт оказался на удалении в точке 0 по вертикальной оси. Тоесть фактически он оказвается в мертовой зоне. Потому что датчик не видит ни один из диодов. Поэтому рабочая зона у вас оказывается только с 0.2 и ниже. Я конечно слишком уж углубился и понимаю что при разнесении диодов всего на десяток см скажем эта мертвая зона будет столь мала что самик туда нивжисть не попадет… но все же, это говорит о том что зона пересечения должна быть строго проконтролирована при этом углы пересечения так же должны быть строго проконтролированы.
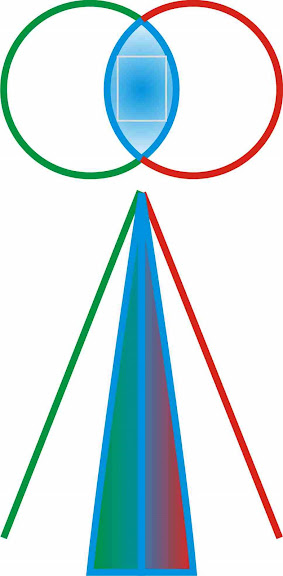
Еще не следует забывать о том что луч круглый поэтому степень перекрытия будет влиять на высоту и ширину коридора где система будет работать. При всем при этом важен и угол раскрытия луча, и угол пересечения лучей который задает ширину работчего коридора. А так же величина взаимного перекрытия не должна превышать 50% Ну а дальше в точности системы уже будет играть роль чувствительность на изменение яркости.
Пример для горизонтальной составляющей. Серенький прямоугольничек это коридор… Верхняя часть-вид спереди, нижняя часть- вид сверху(тут с заливкой все правильно 😃 ).
Считаю что система должна работать. Кто возьмется воплотить в жизнь?
Потому что если заработает, ее можно будет прикрутить к автопилоту от Тима, что значительно повысит его функциональность 😃
Постараюсь на выходных собрать прототип 😃