Smalltim OSD and autopilot (часть 2)

Подскажите, где надо прозвонить по питанию, после разъема должен быть стабилизатор, с чего начать прозвонку?
Там сначала диод (точно есть) и дроссель (вроде). Прозвоните их.
Далее стабилизатор - на последних версиях импульсный. Как его проверить на пальцах не объяснить.
Лучше проверьте на разъемах датчиков, нет ли КЗ между землей и +5 В?
Нашел, кажется, что подогрелось, вот эта деталь, рядом с кондером, на вид целая.
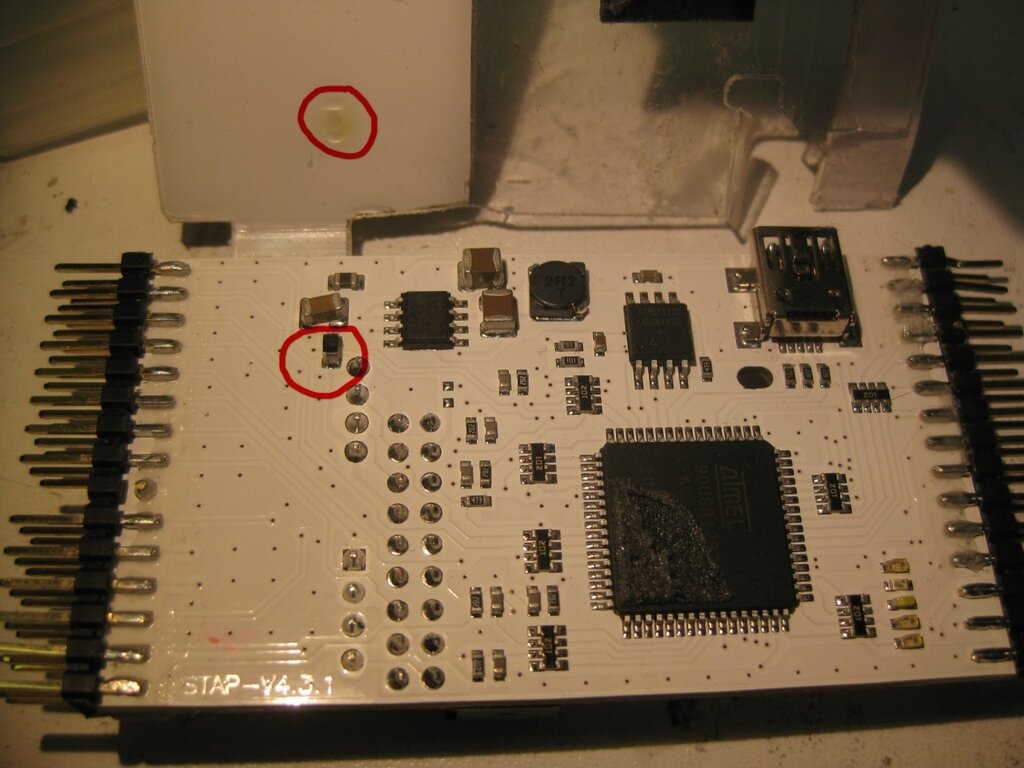
вот эта деталь, рядом с кондером, на вид целая
А как звонится? Если в обрыве, то это проходной дроссель. Попробуйте его замкнуть, для проверки, должно заработать.
Да, кстати, он сидит как раз на + ноги внешнего питания. Сейчас попробую замкнуть. А для чего он нужен, как фильтр? Если я питаю АП от батареи, ничего страшного если я без него буду использовать АП? Деталь никак не звонится, обрыв!
для чего он нужен, как фильтр?
Да. И кстати, как предохранитель от КЗ.
Если я питаю АП от батареи, ничего страшного если я без него буду использовать АП?
Лучше поставить такой или похожий, иначе при КЗ АКК выжгет дорожки на плате.
PS: Для проверки лучше все питать от внешненго БП с ограничением по току и защитой от КЗ. Или от самого слабого акка хотябы. Или через предохранитель на 1 А…
А маркировку реально узнать этой детали? Что искать? Или в Смалтим надо стучаться?
Что искать?
Возмите любой дроссель близкого типоразмера. Думаю номинал там 1-10 мкГн. Но если поставите существенно меньше или больше, ничего страшного, главное что-б как предохранитель работал. 😃
Или в Смалтим надо стучаться?
Точную маркировку спрашивайте у Тимофея или Вахтанга.
Александр, спасибо огромное!
Маленькую проволочку припаяйте, одну жилу многожильного (гибкого) провода 😃
Но вообще- я бы сначала к БП с защитой от КЗ подключил, проверить что дело действительно в этой детали. Вы как-то мимо ушей пропустили этот совет, а помоему зря 😃
А маркировку реально узнать этой детали? Что искать?
Это диод от переполюсовки.
Марка BAS216. Корпус SOD110.
Рассчитан на 250мА. В импульсе держит до 0,5А, если кратко, до 1мс, то 1А.
Раз сгорел, значит что-то коротнули.
Прочитав этот форум, пришёл к выводу, что у существующей телеметрии (SwiftAI OSD Mini) Как бы это сказать, есть недостатки, минусы. Посоветуйте, имеет ли смысл ждать новое устройство
Если нужна ТОЛЬКО телеметрия, то, боюсь, цена на новый комплект будет несколько выше цены за ТОЛЬКО телеметрию.
Другое дело, что если есть возможность иметь НЕ ТОЛЬКО телеметрию - то лучше этой возможностью воспользоваться.
А какие недостатки в существующей телеметрии Вы видите?
Извините, может мало просмотрел, но не подскажете ли когда выходит новый продукт и сколько ориентировочно это будет стоить?
новый продукт в железе давно готов, сейчас в производстве всякие дополнительные прибамбасы.
Причём плата 3 в 1-ом по размерам гораздо меньше чем предыдущая версия отдельного АП. А по процессорам гораздо мощнее.
Тимофей пишет ПО. Как закончит и облетает, изделие поступит в продажу.
Будут и другие новшества, но об этом пока рано говорить.
Ни на один из моих вопросов Вы не ответили…
Так или иначе, спасибо.
Тоже однако талант нужен. сказать много и по теме, но в тоже время ничего.
Облетал сегодня ИМУ. Возникли вопросы:
АП газует на земле сразу, как найдет спутники (если включить автовозврат). Думаю, что собака порылась в бароскорости - стабильно 24 км/ч. Это как-то лечится? Оно ж должно калиброваться при запуске АП, ан нет… Ветер не задувает. Это связано с ограничениями автопосадки? Там стоит скорость меньше 10 км/ч. Но высота при этом 0 и координаты не меняются…Почему АП врубает полный газ и пытается взлететь?
Каналы калибровал, если что, на СТ газ такой-же, как и в ручном режиме. В меню автовозврата -удержание скорости мин из баро и жпс. Мин. газ0%
При старте резко ушел градусов на 30 горизонт, потом постепенно выровнялся - вибрация? Компенсация стоит по баро и датчикам угл. ускорений
Пожелание - телеметрия может генерить синхроимпульсы при пропаже сигнала с камеры? На крайнем полете села Го-про и получил совсем черный экран. А так хоть по приборам можно было бы дойти. Хорошо АП успел подстроить - привел самик домой.
Облетал сегодня ИМУ. Возникли вопросы:
АП газует на земле сразу, как найдет спутники (если включить автовозврат). Думаю, что собака порылась в бароскорости - стабильно 24 км/ч. Это как-то лечится?
Это нормальное явление. Бароскорость тут ни причем. Я даже взлетал в режиме АП, но делать так можно когда полностью уверен в настройках своего АП.
А как-же ограничение в 50м ???
А как-же ограничение в 50м ???
Я уж и забыл, что есть такая настройка в КП, у меня там стоит по всем параметрам “Не используется”, кроме потери-обнаружении РС-связи.
Бароскорость стабильно 24 это нонсенс! Если просто неисправен датчик, она будет 0, так как текущее показание принимается за 0, во время инициализации. Другое дело если бародатчик нагревается чем то и через некоторое время уходит с 0 до 24-х.
Логика определения положения аварийная посадка требует близких к 0 значений скорости и высоты ЗА пределом радиуса базы. Так что движок включится по любому.
Встречный вопрос: зачем включать режим АВ при подготовке модели к старту?
Насчет ухода горизонта при старте - да, вероятнее всего это вибрации и с этим надо бороться. Как установлен ИМУ? Под акк пробывали ставить?
Поддерживать картинку без сигнала с камеры существующая ОСД не может и не сможет. Возможно новый АП/ОСД будет это уметь.
PS: Для более объективных разборов, настоятельно советую выкладывать техническое видео.
Посмотрел внимательно видео. Скорость 24 была после полета. В полете почти совпадает с ЖПС. После инициализации плавно нарастает до 10-12 км/ч, и колеблется 3-20км/ч.
ИМУ сразу за аккумулятором. Небольшое запаздывание горизонта 0.5-1сек это нормально? Компенасция по баро и датчикам ускорения.Или лучше по ЖПС поставить?
Так все-таки, почему движок включается на базе? Режим проверялся для того, чтобы убедиться, что он вообще включается с пульта 😃 , ибо и настройки и калибровки с нуля…
Так все-таки, почему движок включается на базе?
Потому что так и задуманно. В частности вот для этого:
Режим проверялся для того, чтобы убедиться, что он вообще включается с пульта
😃
Скорость 24 была после полета. В полете почти совпадает с ЖПС. После инициализации плавно нарастает до 10-12 км/ч,
Это немного многовато, но не черзчур. Связано с нагревом датчика и АЦП после включения. Если хотие избавиться, рестартуйте АП, после прогрева на земле. Погрешность до 10-12 км/x на земле практически не сказывается в воздухе, при скоростях полета > 30 км/ч.
ИМУ сразу за аккумулятором.
Лучше под акком.
Небольшое запаздывание горизонта 0.5-1сек это нормально?
Это не очень хорошо, но без картинки сложно сказать насколько.
Компенасция по баро и датчикам ускорения.Или лучше по ЖПС поставить?
Лучше оставить так.