Smalltim OSD and autopilot (часть 2)

Принципиальных отличий нет. В какой-то из древнейших версий в другом порядке шли каналы, но это мелочи.
Извиняюсь что влезаю с дилетантским вопросом, просто сам только начинаю пытаться осваивать ФПВ и стараюсь собрать базовую начинку для своего ская. В барахолке увидел объяву о продаже вот такого комплекта

но ни поиск по каталогу на сайте, ни поиск по картинке ничего не дали кроме одного единственного сайта с довольно посредственным описанием. Если не трудно, то хотелось бы увидеть несколько слов касательно этого АП.
Это версия 4.2
Для пользователя совместима со всеми остальными АП.
Для производителя отличается стабилизатором питания, и методом подключения сервоприводов.
Либо к гребёнке, либо к проводам, как в вашем случае.
Была выпущена в небольшом количестве.
Нашел к нему инструкцию, почитал бегло. Судя по описанию вполне жизнеспособная система, впрочем не исключено что я чего-то недопонял в силу отсутствия опыта общения с подобным оборудованием. Как на Ваш взгляд: подойдет для первоначального знакомства?
подойдет для первоначального знакомства?
Если знаете что такое микроконтроллер AVR и как его перепрошить. Без черезмерного напряжения мозга, можете подсунуть COM пору нужный драйвер. И знаете что такое PPM и ШИМ, то есть вероятность, что данный АП принесет вам достаточно приятных мгновений. В противном случае вынос мозга, НЕВРНЫЙ срыв на почве неудачи в ФПВ вам гарантирован. Ситуация усугубляется тем, что в состав ФПВ носителя, входят и другие не менее сложные в настройке ситемы и на них натройку тоже нужно потратить уюму время. Так что для начала можно , что попроще
Если знаете что такое микроконтроллер AVR и как его перепрошить.
😃
Так что для начала можно , что попроще
А что лично вы можете порекомендовать конкретно? Какой АП вы освоили?
У меня Smaltim Практически полетел сразу. А вот с Иглом - нет, пришлось повозиться.
Я не знаю эту модификацию. У меня предпоследняя модификация АП. Может она работать с ИМУ? С пиродатчиками я не брал бы. Приживётся последняя версия прошивки и контрольной панели? Не знаю. Может кто подскажет?
отличается стабилизатором питания, и методом подключения сервоприводов.
Вахтанг, маленький вопрос: на входах/выходах PWM АП стоят емкости после или перед проходного 1 кОм резистора?
Не пойму, откуда такой завал фронтов - больше микросекунды…
Я не знаю эту модификацию. У меня предпоследняя модификация АП. Может она работать с ИМУ? С пиродатчиками я не брал бы. Приживётся последняя версия прошивки и контрольной панели? Не знаю. Может кто подскажет?
У меня эта модификация тоже есть. С ИМУ работает. Именно с этой версией летал на 6 км в высоту и на 37 км в даль.
Я не знаю эту модификацию. У меня предпоследняя модификация АП. Может она работать с ИМУ?
У меня именно такой вариант - с проводами. С ИМУ работает нормально, летает на Скае. До того летал на скаеподобной самоделке, пока я штырь громоотвода на трубе котельной не поймал крылом… Прошивка - крайняя с сайта производителя.
По сути, от более новой версии отличается только этими самыми сервошнурками, вместо гребенки. Проц тот же самый, плата телеметрии подключается так же, все датчики абсолютно одинаковые. Гоняться именно за новой версией смысла не вижу.
Единственный минус - чересчур жесткие провода видеовхода/выхода - отламываются (я перепаивал на 28AWG в силиконовой изоляции от ламп подсветки ЖК-монитора).
Вахтанг, маленький вопрос: на входах/выходах PWM АП стоят емкости после или перед проходного 1 кОм резистора?
Александр
На входе конденсаторов нет, только резисторы, 1К.
На выходе, после резистора в 1К, привязка к земле через резистор 2К и конденсатор 1нФ.
На выходе, после резистора в 1К, привязка к земле через резистор 2К и конденсатор 1нФ.
А можно узнать зачем? Делитель 3/2 еще ладно - что-бы уровни привести к 3 В, хотя неясно где это важно: все современные сервы нормально держать 5 В, а древние, в худшем случае, не любят 3.3 В? А вот нанофарад зачем? Для ЭМС достаточно (и даже более предпочтительно) 100 пФ, да и то это входам гораздо важнее, для выходов проходное спротивление 1 кОм, ИМХО, дает почти все виды защиты…
А можно узнать зачем? Делитель 3/2 еще ладно - что-бы уровни привести к 3 В, хотя неясно где это важно: все современные сервы нормально держать 5 В, а древние, в худшем случае, не любят 3.3 В? А вот нанофарад зачем? Для ЭМС достаточно (и даже более предпочтительно) 100 пФ, да и то это входам гораздо важнее, для выходов проходное спротивление 1 кОм, ИМХО, дает почти все виды защиты…
У Меги очень злые драйверы на пинах, и если не сглаживать фронты, теоретически может появиться звон и наводки на бортовое оборудование в непредсказуемой полосе частот. Считайте сглаживание фронтов на выходах PWM дополнительной перестраховкой.
нет, хотя там есть проблема с минусом на видео выходе. Дрожит не всегда. Иногда все работает нормально. Тимофей, можно отдать на проверку и ремонт АП?
Да, Сергей, без проблем. Стукнитесь в личку, пожалуйста.
У Меги очень злые драйверы на пинах, и если не сглаживать фронты, теоретически может появиться звон и наводки на бортовое оборудование в непредсказуемой полосе частот
После 1 кОм проходного резистора? Где ты это видел? Сколько ни встречал схем на Меге, нигде такого нет…
Единственное стандартное обоснование кондера на входе или выходе - это ЭМС требование защиты от наносекундных помех и затухающих радиочастотных. Но тогда 100-150 пФ вполне достаточно (вкупе с резистором). От мощных микросекундных помех ни 100 пик, ни 100 нФ все равно не спасут - нужны варисторы или защитные диоды… Но для наших требований, такие условия даже не ставятся…
Считайте сглаживание фронтов на выходах PWM дополнительной перестраховкой.
Как бы не перебрать. 😃 Если помнишь, многие лог.входы нормирует как максимальноую, так и минимальную скорость нарастания фронта. С 10 нФ, на выходе АП фронты затянуты на 1.5-2 мкс. Плюс это лишний джиттер.
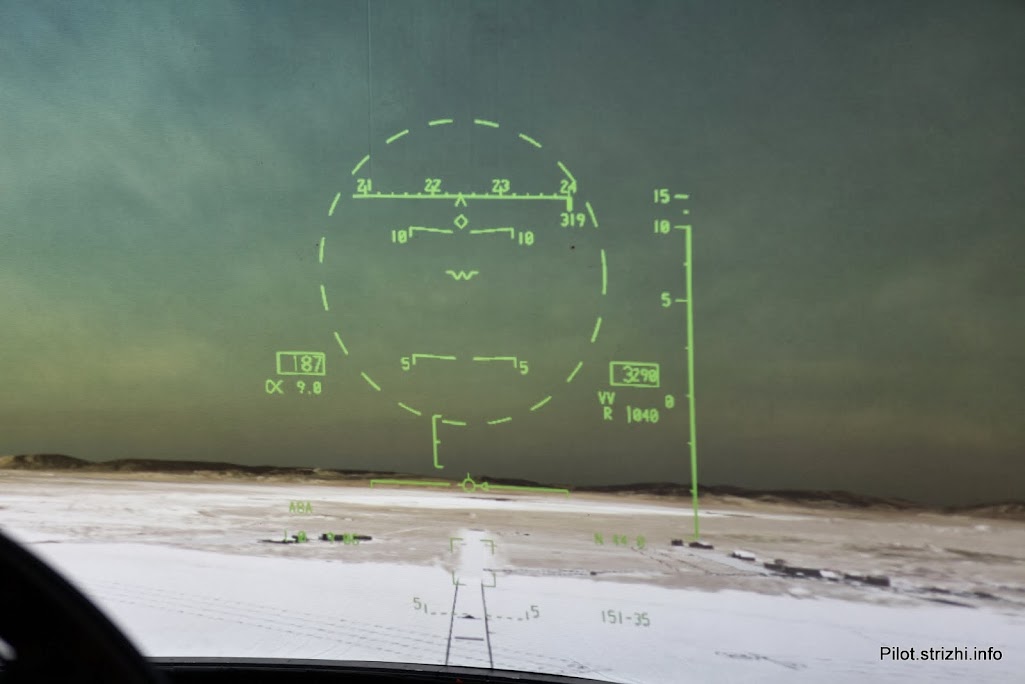
возвращаясь к вопросу об индикации. специально снял.
вот Ф-16

а вот Ф-15. Здесь интересно реализован режим захода на посадку. квадратик стоит на полосе, летчику надо просто подвести кружочек в центр квадратика и самолет придет точно в зону приземления на полосе 😃 Это к вопросу о взлете и посадке по-самолетному на полосу
возвращаясь к вопросу об индикации. специально снял.
В данной версии АП Смаллтим вряд ли производителю получится изменить индикацию.
я знаю, но про индикацию говорили именно в этой теме 😃 в новой мне нравится 😃
Ааа, тогда было бы хорошо:).
Заполучил себе автопилот обр. 2012г. прошивка 1.20. Не могу его перепрошить. Телеметрия, вроде, прошилась - не знаю где смотреть текущую версию её прошивки, а никаких сообщений о успех/неудаче программа не выдавала. А вот в процессе первой перепрошивки автопилота из трея выползло сообщение о установке драйверов. Драйвера системе установить не удалось. Когда время ожидания готовности платы в окне обновление микропрограммы доходит до 1 секунды, выдаётся сообщение “Ошибка соединения с платой в режиме DFU Возможная причина: Драйвер DFU не установлен. Плата не подключена или неисправна.” Связь с АП пропадает до его перезагрузки. Сообщений системы о попытке установить драйвера устройства при последующих попытках не было. Система Вин 7 64 бит. Что я делаю не так? В инструкции нет про прошивку. Нужно отсоединять телеметрию и/или провода? Нужно питание от батареи подавать? Где брать эти драйвера DFU? Должен АП прописываться в диспетчере устройств, и под каким именем? Сейчас его там нет…
И ещё одна особенность всплыла в процессе настройки в КП. Нет сигнала второго управляющего канала С2. Причём я подключал в него провод с другого канала приёмника (с которого только что сигнал АП видел), но результата нет…
Арсен, скачайте крайнюю версию Контрольной Панели (swiftai.com/sites/…/control_panel_5_2_3.zip )
Распакуйте архив в c:\SwiftAI.
Драйвер для автопилота в режиме обновления прошивки будет лежать в c:\SwiftAI\drivers
Укажите системе этот путь при следующем обновлении прошивки, когда система запросит драйвер для автопилота в режиме обновления прошивки.
Подавать питание от батареи при обновлении прошивки АП не нужно. Отсоединять плату телеметрии не нужно.
Второй управляющий канал идет на АП через плату телеметрии, т.е., нужно, чтобы были установлены крайние версии прошивок телеметрии и автопилота.
Крайняя версия прошивки автопилота: swiftai.com/sites/…/autopilot_1_25_4.hex__0.zip
Крайняя версия прошивки телеметрии: swiftai.com/…/telemetry_gen_4_1_2_com_ap_e_ta.hex_…
Весь софт был уже свежий. Система больше не пытается искать драйвера - это было только в самый первый раз. Пробовал перезагружаться и т. п… Мне нужен, получается, экзешник для установки этих драйверов DFU самому, в папке такого нет…
Как узнать версию прошивки телеметрии?