Беспроводная передача видео в full HD

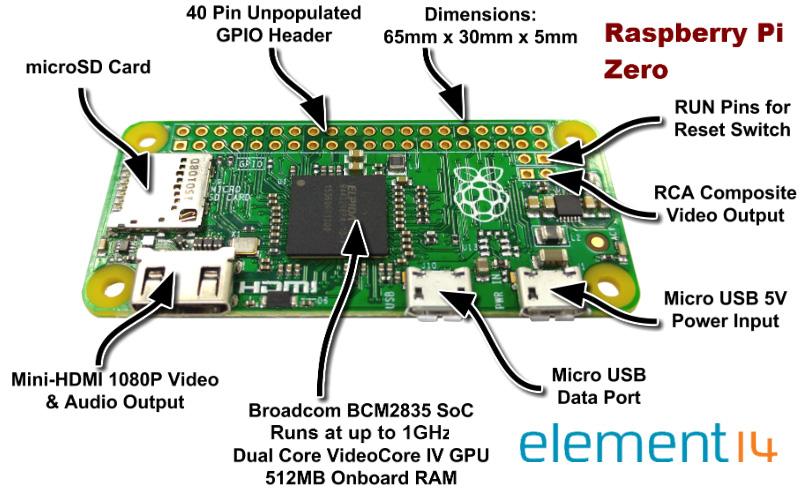
Выпустили новый Raspberry Pi Zero, по 5 USD за штуку.
A Broadcom BCM2835 application processor
1GHz ARM11 core (40% faster than Raspberry Pi 1)
512MB of LPDDR2 SDRAM
A micro-SD card slot
A mini-HDMI socket for 1080p60 video output
Micro-USB sockets for data and power
An unpopulated 40-pin GPIO header
Identical pinout to Model A+/B+/2B
An unpopulated composite video header
Our smallest ever form factor, at 65mm x 30mm x 5mm
www.raspberrypi.org/blog/raspberry-pi-zero/
там под нужную камеру разъема нет
Хоть и не фуд ХД но всё равно интересно.
Кто ни будь это держал в руках? как с качеством картинки по вайфаю?
www.tacticrc.com/fpv/droneview/index.html
и задержка вроде на совсем смертельная.
Хоть и не фуд ХД но всё равно интересно.
Что то с дальность не совсем понятно
Дальность такая, на сколько канал WiFi добьёт.
пишут в стоковом варианте камеры и телефоне в руке на открытой местности 100 м.
ну а дальше, городить антенны и RF усилители.
Успешно запустил сегодня WiFi Broadcast. Не без танцев с бубном (пришлось поставить Linux и разобраться в нем 😃), но оно заработало и выглядит вполне приемлемым решением за разумную цену.
В качестве WiFi использовал 1000 мВт Ubiquity, так что приемный адаптер пришлось заворачивать в фольгу, иначе он перегружался по входу.
В качестве WiFi использовал 1000 мВт Ubiquity
На передаче\приёме или с обоих сторон?
Пришлось ли допиливать драйвер или с теми образами что выложены на befinitiv.wordpress.com завелось сразу?
Какое расстояние и при каком битрейте и разрешении получили?
На передаче\приёме или с обоих сторон?
На передаче Raspperry P2 + Ubiquity Wifistation EXT. На приеме RPi2 + Ubiquity Wifistation, либо ноутбук под Linux’ом с той же Wifistation (проект можно пересобрать под PC).


Пришлось ли допиливать драйвер или с теми образами что выложены на befinitiv.wordpress.com завелось сразу?
Выбранные образы из коробки не заработали, пришлось поправлять и скрипты, и код. Описал на rcgroups, см. в конце этой страницы и дальше - www.rcgroups.com/forums/showthread.php?t=2454052&p…. На данный момент это конструктор “сделай сам”.
Какое расстояние и при каком битрейте и разрешении получили?
Расстояние не проверял. Разрешение произвольное, пробовал 640х480х60, 1280х720х48, 1920х1080х30. Битрейт 4…6 Мбит. По качеству - не GoPro, но на порядок лучше аналогового. Задержку не мерял, по ощущению - обещанные 150 мс и есть, в особенности на 48 кадрах. Примерно как с видеовыхода Мебиуса, летать по этому точно можно.
В общем для себя я, кажется, вопрос с HD FPV закрыл. Проект сырой, но исключительно гибкий, не бог весть с каким пока размером кода, и развивать его есть куда.
Проект сырой, но исключительно гибкий
Недорого, доступно. Что ещё нужно?
Я, это, закрыл в положительном смысле. Т.е. HD FPV у меня теперь есть, допилить только 😃
Попробую его портировать на Виртурилку, а то 2 штуки лежат без дела, а они все-таки полегче и питание разумнее.
Добиться стабильности, добавить OSD с MAVLINK и получиться отличная вещь.
Пилите Дмитрий, пилите, я не против буду купить такой линк по хорошей цене, т.к нет времени возиться самому.
В эту штуку просится двунаправленный надежный канал связи между землей и APM. При том, что решение по своей идеологии просто излучает пакеты в воздух и не беспокоится, приняты они или нет. Соответсвующий код называется уровнем TCP над ненадежными пакетными сетями, понятно, где искать.
Пилите Дмитрий, пилите, я не против буду купить такой линк по хорошей цене, т.к нет времени возиться самому
Благодарю за напутствие. Вы уверены, что Вас устроят мои цены, когда дело дойдет до договора ?
Думаю многие заинтересуются, при условии озвученных характеристик после испытаний. А там уже и поговорим о цене.
А там уж 😃
В эту штуку просится двунаправленный надежный канал связи между землей и APM
А и не надо пытаться этим заменить телеметрию автопилота.
В эту штуку просится двунаправленный надежный канал связи между землей и APM.
Чем плох канал: LRS земля->борт+обратный по WiFi broadcast? Это если на большое расстояние. А так обычные радиомодемы вполне решают задачу. Поверх них протокол с проверкой и перепосылом при потере пакета.
А шоб було. Странно иметь на борту 6 Мбит/с линк и при этом гнать небольшой поток телеметрии через отдельные железки. Автор, кстати, передачу FrSky’евской телеметрии уже реализовал.
Учитывая возможность портирования APM на Raspberry, разумно выглядит средствами Raspberry делать все, включая связь.
Канал LRS на 433 полезно оставить как резервный, но в принципе можно и без него.
Странно иметь на борту 6 Мбит/с линк и при этом гнать небольшой поток телеметрии через отдельные железки
Телеметрия, она по большей части с борта на землю идёт. Конечно её имеет смысл именно по основном потоку гнать, благо это несложно.
Я имел в виду обратный канал, по мне так он совсем не нужен, но некоторым хочется иметь. Тут уж несколько сложнее получается, если цель сделать не
совсем узкоспециализированное решение, т.к. используемые средства РУ сильно разнятся.
Учитывая возможность портирования APM на Raspberry, разумно выглядит средствами Raspberry делать все, включая связь.
Этому проекту уже более года, но распространения так и не получил. IMHO тупиковая ветвь, вряд ли получит развитие. Плата navio 168$, в 5 раз дороже APM.
Вещь не коробочная, т.е. мало кто сможет запустить.
Да и модульная конструкция более универсальна, полётный контроллер(APM/Pixhawk/Naza)+HD видеоблок на Raspberry, между ними serial для телеметрии,
на земле raspberry на приём и наложение OSD. На мой взгляд идеальный вариант.
Тут уж несколько сложнее получается, если цель сделать не совсем узкоспециализированное решение, т.к. используемые средства РУ сильно разнятся.
Надо повнимательнее посмотреть код передатчика и приемника. Примерно так : приемник создает виртуальный последовательный порт при помощи named pipe, например /dev/wifibroadcast_tty. После приема каждого пакета с видео приемник смотрит, есть ли что-нибудь, что отправить, и отправляет пакет на борт. Передатчик на борту, получив пакет, должен его подтвердить, отправив назад пакет с контрольной суммой. Приемник продолжает излучать пакет до тех пор, пока не получит подтверждение. Так достигается гарантированная доставка.
Передатчик на своей стороне делает то же самое.
IMHO тупиковая ветвь, вряд ли получит развитие. Плата navio 168$, в 5 раз дороже APM.
В таком виде да, экономический смысл отсутствует напрочь. Надо переделывать на дешевое железо. Примерно так :
- Акселерометр, гироскоп, магнетометр и барометр - вот этот модуль, подключается по I2C.
- GPS - Ublox Neo 6M, подключается к последовательному порту либо переделывается на USB (у модуля есть USB-интерфейс, он просто не разведен на плате),
- Приемник LRS - модуль RFM23BP 30 dBm ( 1000 МВт ) на 433 МГц, подключенный по SPI. Код приемника OpenLRSng при этом портируется с Arduino на Raspberry (он на C, не должно быть проблемой). Заодно снимается вопрос, как завести на Raspberry PPM.
- АЦП - любой I2C, либо вот это решение.
- Выходы на сервы - выводы GPIO, скоростная библиотека для этого есть.
на земле raspberry на приём и наложение OSD
На земле было идельно реализовать прием на Андроидовском планшете с подключенным внешним WiFi. После чего засунуть его в шлем, а его датчики положения использовать как Head Tracker.
В таком виде да, экономический смысл отсутствует напрочь. Надо переделывать на дешевое железо. Примерно так
По железу вполне рабочий вариант.
GPS - Ublox Neo 6M
Мне кажется интереснее NEO8n там есть SPI/I2C, работает лучше, стоит так же(~18$).
На земле было идельно реализовать прием на Андроидовском планшете с подключенным внешним WiFi
Универсально мне кажется не получится, планшеты разные, драйверов для нужного для Wi-Fi broadcast чипсета нигде нет, а т.к. прошивки с ядрами разные нужно драйвер под каждое ядро собрать, рутовать планшет\телефон. Сильно нетривиально - соответственно востребовано еденицами-энтузиастами.
А отдельная коробочка RPi, в которую достаточно вставить SD карту с заранее настроенным софтом, включить в USB пару донглов и монитор в HDMI не требует особой технической подготовки и доступна всем. Да и шлемах HDMI часто уже есть.