qczek lrs – 433mhz 1w (30dbm) lora rc link with telemetry - новая народная?

Собираешь по схеме как на офф.сайте и радуешься жизни. Никаких доработок не нужно.
Да, действительно, дельный совет. Даже тему можно закрыть, т.к. все что написано на офф.сайте отлично работает у всех. Да и в пшекском языке все понятно. 😠
все что написано на офф.сайте отлично работает у всех
Ну в целом да. )
Если вам непонятен английский - то вам нужен переводчик, никаких других наработок тут нет.
Обычно помогает трехкратное чтение инструкции, и четырехкратная проверка всего, что по ней сделано. Это лучшая наработка, которой с вами могут поделиться в данной ситуации.
Опять же, прошу заметить, делаю не модуль лоры, а ретранслятор. Модуль делается легко. С ретранслятором начинается танец с бубном. Еще раз повторюсь, не хочется сжечь что-либо из электроники.
Ну нет разницы, даже проще, добавляется только инвертор и все. У меня все ретрансляторы заработали с первого раза, на прошивку и настройку - 5 минут.
Для работы телеметрии нужно правильно настроить не только ЛРС, а и автопилот, и аппу. Но все это описано.
Сжечь ничего невозможно - там подключается один проводок на вход СПорт, и один на блютус. Переполюсовку главное не делайте.
Диоды я вообще не подключал, и так все работает.
Но все это описано.
А можно либо ссылками, либо по пунктам для тех кто в танке (меня)? Потому что много разных инструкций перепробовал, все мимо. Уже и запутался где правильно делал, а где нет. Спасибо)
поставь версию 1.91 и будет работать
некорректное отображение уровня сигнала шума и принимаемого уровня. переодические отвалы телеметрии… Обновитесь уже хотя бы до 1.92 что-ли…
Опять же, прошу заметить, делаю не модуль лоры, а ретранслятор. Модуль делается легко. С ретранслятором начинается танец с бубном. Еще раз повторюсь, не хочется сжечь что-либо из электроники.
И ретранслятор и модуль лоры делаються легко. У меня и тот и другой сделан. Единственные аспекты: не перепутать плюс с минусом; без антенны не включать; если сбас на передатчике, то сигнальный провод подключать к rx, если ppm то в aux; инвертор собирается по любой схеме в интернете за 10-15 минут; прочитайте инструкцию к полетнику куда там можно подключать сбас; запитывать модули лучше не больше 5 вольт; чтобы настроить передатчик надо замкнуть м1 (или м0) с землей и подать питание и через 5 секунд разомкнуть м1(или м0) с землей; на приемнике тоже самое, но м1 с м0 на 5 секунд.
Вроде все аспекты записал
Вроде все аспекты записал
Благодарю, однако все данные пункты я соблюдал и выполнял. Инвертор сделал на маленькой печатной платке смдшными компонентами. Повторюсь, управление (без теле) на 1.92 я получил. На 2.0 не добился ничего. Темным лесом для меня стала настройка Inav’а для получения rssi и телеметрии, настройка модулей лоры в конфигураторе пшека и их соединение. Дополнительным бонусом хотел получить телеметрию с блюпупа, но пока с основными настройками не разобрался до блюпупа далеко.
Забыл сказать, что полгода только как познакомился с современным полетным оборудованием. До этого 8 лет летал на хоббикинговском hk-t6a. Поэтому отстал в развитии лет эдак так на шестьсот. Прошу простить мое невеждество 😃
Ну так задавайте конкретные вопросы - получите конкретные ответы. А не “у меня ничего не работает, что делать?”
И по одному.
Благодарю, однако все данные пункты я соблюдал и выполнял. Инвертор сделал на маленькой печатной платке смдшными компонентами. Повторюсь, управление (без теле) на 1.92 я получил. На 2.0 не добился ничего. Темным лесом для меня стала настройка Inav’а для получения rssi и телеметрии, настройка модулей лоры в конфигураторе пшека и их соединение. Дополнительным бонусом хотел получить телеметрию с блюпупа, но пока с основными настройками не разобрался до блюпупа далеко.
На 2.0 у многих проблемы. Пока нет четкой инструкции и технологии, поэтому лучше оставьте 1.92.
По телеметрии - порты как на фото, скорость 1200, TX UART2 соединить с AUX модуля, прописать в cli айнава скорость телеметрии ltm_update_rate = SLOW, на ретрансляторе подать сигнал на блютус, скорость 9600.
RSSI в айнаве выключить, включить её в настройках модуля qczek.
Вроде всё…
TX UART2 соединить с AUX модуля
Вы говорите о версии 2.0?
Нет, 1.92. Не вижу смысла экспериментировать и тратить время на сырую пока 2ую версию с неясными преимуществами.
Спасибо! Вечером попробую. А как подключить в ретрансляторе приемник Jumper R1 к передатчику лоры? Данная схема с оф сайта актуальна?
Про Jumper R1 не скажу, меня подключение по смартпорту и/или передача телеметрии на пульт никогда не интересовало.
Я снимаю телеметрию с ретранслятора через блютус и дальше на лаптоп (или куда еще захочется).
Приёмник в ретрансляторе XM+, у него есть точка снятия неинвертированного сигнала (вот тут все приёмники и точки).
Подключение самое обычное - три провода на модуль (+,- и сигнал), четвёртый провод с TX модуля на RX блютуса для телеметрии.
Питание модуля - элементы 18650 без всяких заумнений, от 4.2 до 3.5В работает без проблем, 3 параллельные банки дают запас энергии на полдня полётов (с 12 дня до 8 вечера).
В блок встроена плата зарядного под миниюсб, вольтметр и выключатель питания.
меня подключение по смартпорту и/или передача телеметрии на пульт никогда не интересовало
Из телеметрии требуется только параметр Vspd для звукового вариометра. Для планера очень нужная вещь.
Я на планере по ФПВ не летаю, а свои трёхметровики гоняю по старинке - на глазок и шестому чувству…
Если были такие задержки, как в первом вопросе, то для начала подключи свой приёмник к автопилоту напрямую(через спаяный тобой инвертор). и если всё будет корректно , после этого в цепочку управления ставь Лору. Когда через Лору управление будет работать, мучайся с телеметрией. Не надо всё в кучу.
Я на планере по ФПВ не летаю, а свои трёхметровики гоняю по старинке - на глазок и шестому чувству…
А я синие фломастеры больше люблю, чем зеленые.
подключи свой приёмник к автопилоту напрямую
при подключении R1 к Полетнику задержек нет. Летать даже можно, но не более 400 метров - пропадает связь из-за 1,2ГГц видео. Помехи из-за кратности частоты.
А смотреть задержку, если подключать лору к разъему внешнего модуля на аппе идея так себе, т.к. аппа начинает крутить-вертеть. Но задержка явно на стороне лоры. Но для большого инертного мотопланера это не так критично
Вот сейчас шью модули лоры. Поправьте, пожалуйста, если я не прав.
На ретрансляторе (передатчик) T433A_P_SBUS_T_SPORT_V1.92.s19
На приемнике в самолете R433A_T_MAVLINK_P_CPPM_P_SBUS_V1.92.s19
В qczek конфигураторе поменял на передатчике: Pairing Code 11111, протокол SBUS input, No CPPM CH - 16;
на приемнике: Pairing Code 11111, протокол SBUS, No CPPM CH - 16;
Управление с задержкой 0,3 сек получил;
И заметил еще в прошлый раз, что сервы судорожно отрабатывают движения. Не плавно, а рывками. Это норма?
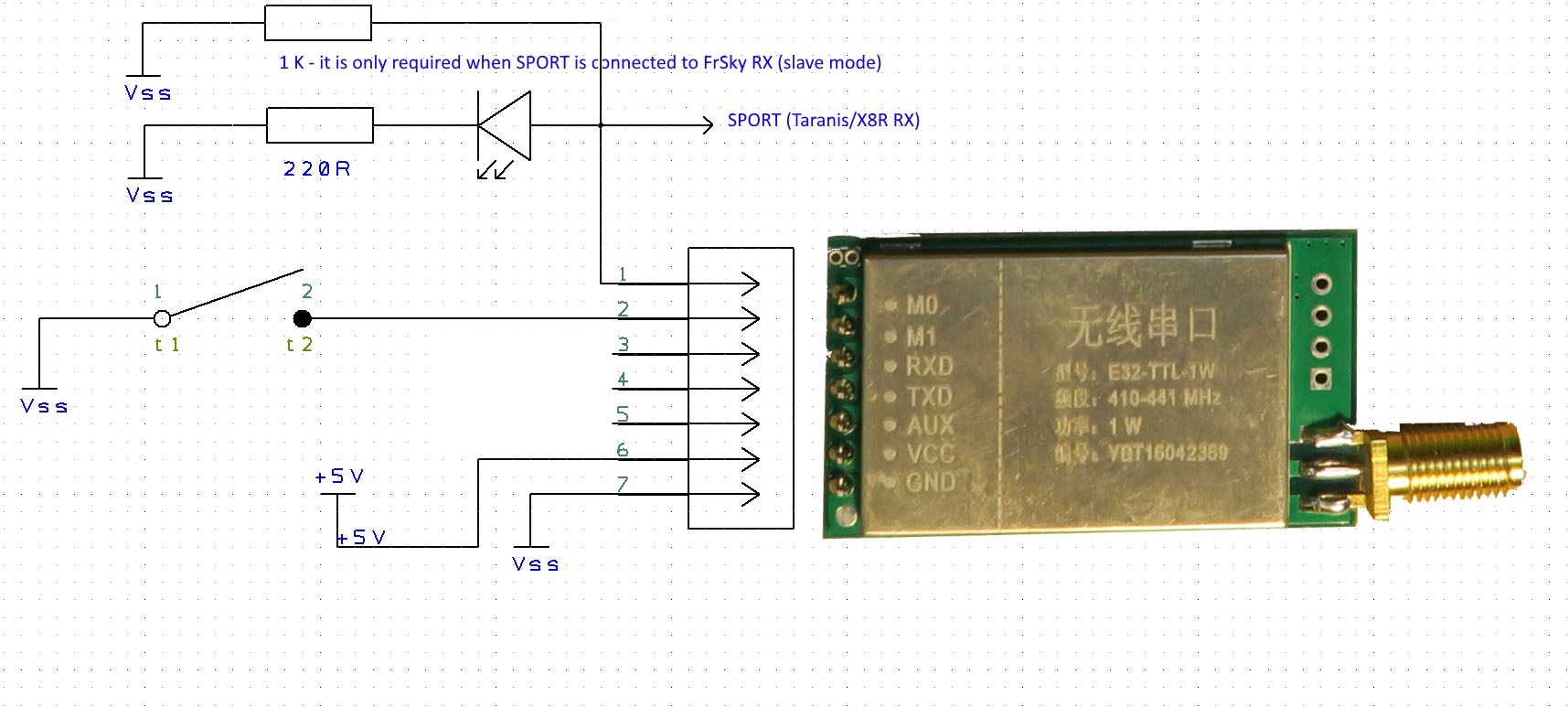
Как подключить телеметрию (как её настроить в конфигураторе и Inav)? в данный момент подключение всех проводов на фото. Прошу прощения за корявость, чукча не художник)
Схема актуальная. На приемнике jumper есть 5+, земля, сбас, спорт. Землю подключаем к земле, 5+ подключаем к 5+ вольт, сбас подключаем к самодельному инвертору, дальше подключаем к rx лоры. М0 с лоры подключаем к спорт на джампере. Так же м0 у меня подключен к светодиоду и моргает только когда есть телеметрия с борта. Все, больше ничего мудрить не надо. В настройках надо поставить мавлинк+спорт слэйв.
М0 с лоры подключаем к спорт на джампере.
Резистор 1кОм нужен?
Спасибо! Сейчас буду делать