Activity
Раньше много летал на 12 вольтовых передатчиках Lawmate 1.2 ГГц 1Вт И в общем всё устраивало. Хотел ещё взять таких, но они пропали из магазинов. Новые 5 вольтовые работают у меня гораздо хуже. Не знаете, можно ли где-то найти старую версию или может есть что-то получше на 1.2 ГГц?
Думаете там платят? Сомневаюсь) А на будущее да, прикольно работать, когда ни семьи, ничего нет.
А какую зарплату вы считаете адекватной для такой должности? 😃
физику обмануть пытаетесь ???
Разве антенна в пол волны принимает не лучше чем в четверть? Вот и тут я думал, что кратно увеличив её размеры можно получить выирыш. Множить хотел те самые FCR-1200/15.
Они в одну сторону направлены и ДН от этого сужается, а не расширяется (усиление растет). Cитуация прямо противоположная:)
Получается ваш пример подтверждает вышесказанное- 4 патча в разные стороны- в четверо меньше усиление:)
А кто говорил, что я их в разные стороны направлять собираюсь? Все направляются параллельно. Задача увеличить дальность сохраняя довольно широкую диаграмму патча. Сейчас у меня предел около 50км. А нужно 100.
Как думаете, если взять 2 или 4 патча на 1.2 гГц и использовать их все вместе, как и на сколько сложно их будет согласовать и какую прибавку это может дать?
Есть задача для кино в кадре влететь с улицы в окно второго этажа шириной 80 см. Причём вертолёт должен тащить на себе мини букет. Хотябы один цветок.
На чём это возможно сделать? И за сколько бы вы согласились поучаствовать в таких съёмках? (провести день на площадке и сделать 5-6 дублей)
Есть задача максимально увеличить дальность приёма видео.
Есть 2 передатчика… можно ли используя 2 передатчика одновременно что-то улучшить?
Оба передатчика на 1.2ггц
Что будет если они стоят на одном самолёте и берут сигнал с одной или двух разных камер…
- на одной частоте с одинаковой поляризацией антенны
- на разных частотах с одинаковой поляризацией
- на одной частоте с разной поляризацией
- на разных частотах с разной поляризацией
какая должна быть разница в частотах чтоб они не мешали друг другу?
как будут работать 2 разных передатчика (лавмейт на 1вт и бев на 1.5 вт) при такой установке?
Посмотри тут, но это: www.aliexpress.com/wholesale?SearchText=Robot Chas…
Спасибо! Есть отличные варианты. Жаль по китайски не понимаю… ттх приходится гадать. 😃
Подскажите пожалуйста продаются ли отдельно какие нибудь гусеничные шасси? Тоесть просто гусеничная тележка с моторами. Нужно сделать мини робота под перевозку около 2-3кг но хочется использовать какую-то готовую конструкцию. Или может подскажете какой-то танк с наиболее надёжной механикой сопоставимого веса?
P.S. Конечно перед тем как спрашивать пересмотрел много разных магазинов. Отдельной тележки нигде не видел а внутренности какого танка могут подойти не ясно.
А, я нашёл, спасибо. Вообще тема очень интересная.
Калькулятор парашюта мне отвечает “инфинити”.
Видимо что-то очень большое запустить собираетесь… 😃
Проверьте цифры с дробной частью у вас разделяются точкой или запятой? Если это не поможет скиньте мне в личку исходные данные посмотрю в чём проблема.
Денис, спасибо, это полезная информация. А 500-граммовый до какого диаметра за земле дуть? Есть какие-нибудь характеристики производителя, хотя бы по подъемной силе и высоте разрыва?
P.S. - с интересом следил за вашими запусками )
Так там же лежат и все ТТХ шаров nearspace.ru/?page_id=164
Вот и расчёт парашютов выложил nearspace.ru/?page_id=181
Через 2 недели вернусь домой, постараюсь выложить расчёты траекторий и многое другое… Жаль времени не хватает на подготовку имеющегося материала.
Спасибо, попробуем.
А то кроме Америки пока вариантов разумных не нашёл.
Ну можете ещё у меня купить… Цены дешевле чем на ебее с их доставкой.
nearspace.ru/?page_id=170
Надеюсь не сочтёте за рекламу… Просто отвечаю на вопрос где купить… 😃
Залил последнюю прошивку… горизонт выправился но усугубилась тряска по питчу до полной непригодности съёмки. Причём эта тряска появляется после резкого рывка коптера и иногда пропадает после нескольких качаний подвеса с пульта. Её можно спровоцировать и на столе подёргав подвес и остановить приложив палец к камере. Тоесть подвес иногда входит в резонанс по питчу, но все мои игры с пидами не помогли. Есть идеи или опыт решения?
А у кого-нибудь работает на первой назе светодиод от второй?
Ради установки iosd повесил на первую назу PMUv2 и оранжевую коробочку со светодиодом.
Всё кроме диода работает и летает. При подключении к USB расположенному на светодиоде он загорается зелёным, прошивка в назу заливается и все настройки работают… А вот в обычном режиме он не горит никак.
Не проще внешний бек? У меня питает все вышеперечисленное без проблем
Не хочу тащить к фотоаппарату лишние провода, дабы не создавать лишних помех подвесу. Хочу использовать питание от платы датчиков.
Ладно, про удержание по магнитометру, видимо, никто не знает.
Но появился ещё дурацкий вопрос 😃 … Правильно ли я понимаю, что на плате стоит стабилизатор на 5 вольт, который к примеру питает платку с датчиками. А как бы узнать его мощность? Потянет ли он RC приёмник, hdmi конвертер или видео передатчик?
UPD. Если правильно понял, то максимальный ток - 500 mA.
А сколько жрёт сам контролер? Для приёмника видимо хватит, а для остального уже врядли.
Стрелка и будет на месте стоять. А вот команды на плату ( или с приемника или с датчика) будут подаваться. Включите аппаратуру.
К контроллеру ничего не подключено. Значит с приёмника никаких сигналов нет. Я могу подключить приёмник и дать сигнал на медленное вращение в обратную сторону, но это явно не правильное решение. Тут либо надо найти причину дрейфа (а на сколько я понимаю все гироскопы дрейфуют по Yaw), либо как-то задействовать магнетометр. Соответственно вопрос… Нет ли у Алексея в коде корректировки YAW по магнетометру, не планируется ли?
Посмотрите на аппаратуру, может надо тример подправить, что бы середину сигнала выправить. У меня тоже крутилась, и красная точка в программе тихонько по кругу ползла. Оказалось, что передатчик выдавал кривой сигнал. Тримером поправил в +4 и дрейф прекратился.
аппаратура не подключена. Подвес висит над столом. Стрелка “компаса” в гуи стоит неподвижно. Дрейфует со скоростью примерно один оборот минут за 20… А мне нужно сохранение направления в течении 2х часов.
Получил с рстаймера зх осевой подвес с двумя GBM4108. Один намотан просто ужасно, но в общем работает. У второго намотка выглядит гораздо лучше но одна фаза замкнута на корпус. Если прозванивать фазы по очереди на корпус, то сопротивление 15, 9, 0
-
Правильно ли я сделал, что решил не рисковать контроллером и не пытался подключить двигатель с замыканием? Не может же он чудесным образом работать? Или для контроллера (Алексмос) это не страшно и стоит попробовать?
-
Есть ли в Москве умельцы готовые помочь понять почему там замыкание и что с ним делать?
Подскажите есть ли какое-нибудь способ избавиться от дрейфа по YAW? Может есть варианты плат под Алексмос с компасом?
А на такие регуляторы разве не надо внешний ВЕС цеплять? Их можно прямо от аккума питать?
Все регуляторы питаются прямо от аккума, а БЕК это лишь их вспомогательная функция.
Не могу справиться с дёрганьем подвеса по тангажу.
Пробовал понизить мотор пауер до 30… ситуация только ухудшилась. Пробовал добавить дополнительную виброразвязку - не помогло.
Люди, у кого этот подвес не вызывает нареканий по стабильности выложите пожалуйста скриншоты настроек.
в место шторма надо ставить игл. у него двиг включается на настроенной высоте. Выставить к примеру 2км высоты и пусть до нее без движка планирует…
Это хорошая опция, но полёт выше 15 км требует ещё массу специфических возможностей, и для их решения нужно использовать либо АП с открытыми исходниками и править их либо АП, разработчик которого готов потратить своё время на дописание этих функций. Большинство АП не рассчитаны на большие высоты и под хранение высоты может быть выделена ячейка размером не более 16000 или как в Шторме 10000, а при переполнении этой ячейки автопилот может начать думать что он на 16 км ниже уровня моря и будет пытаться выгребать вверх. Да и барометры на большинстве АП не умеют мерить выше 10 км. Так что игл тут врядли подойдёт, а вот ардупилот (при условии приложения своих рук) и смалтим (при условии помощи разработчиков) выглядят гораздо перспективней.
Клевера, конечно, предпочтительне, но менее “краше стойкие”.
По приему я бы поставил антенну с большим числом витков. А лучше бы, несколько штук с разным числом витков. Самой слабой, зато с самой широкой ДН, примерно определяем направление, и нацеливаем основной “пулимет” на ЛА 😃
Хм… а чем клевер лучше квадрифиляра?
Да, так и планирую раздобыть ещё один хеликс подлиннее… но вот не могу решить, что важнее купить приёмник получше (лавмейт вместо моего БевРсишного) или антенну подлиннее. На оба пункта пока денег не хватает.
Если не секрет, для чего!? 😃
Всегда хотелось посмотреть на землю сверху… А после нескольких запусков выложенных в сеть ко мне стали приходить разные учёные со своими интересными проектами и экспериментами, ну и пару коммерческих рекламных запусков осуществил, что позволило испытать на них дорогую технику.
А вообще это странный вопрос для данного форума 😃
Мое ИМХО.
На такой высоте достаточно разряженная атмосфера, соответственно малые числа рейнольдса, и всего единицы качества, как только АП или вы в ручном режиме пытались выравнивать самолет по тангажу,начинался срыв воздушного потока, т.е воздушный поток перетекающий по верхней части крыла сильно турбулизировался, и крыло попросту проваливалось, в этот момент вы или АП ту-же давали корректировку в противоположную сторону, срывалась другая консоль, опять корректировка, и начинался резонанс, т.е. раскачивало аппарат все сильнее и сильнее, в плоть до его переворота…
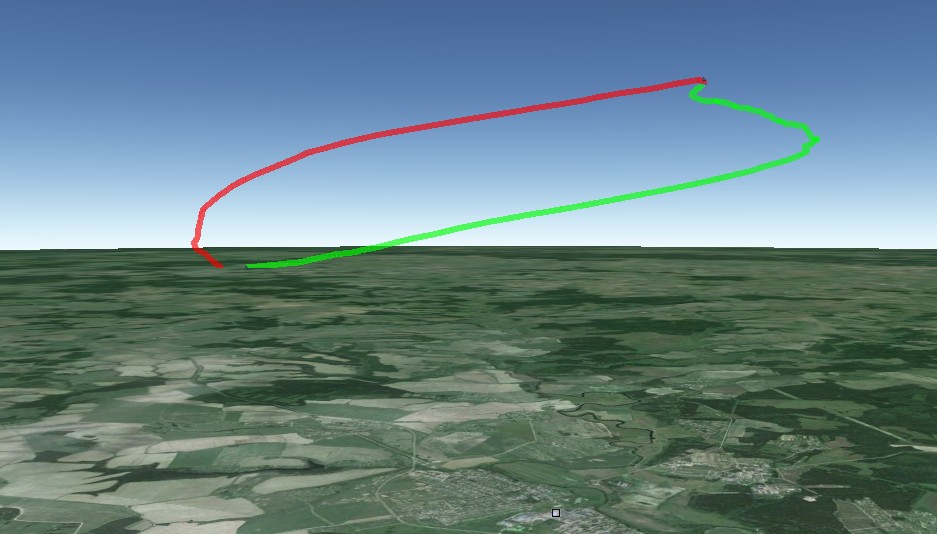
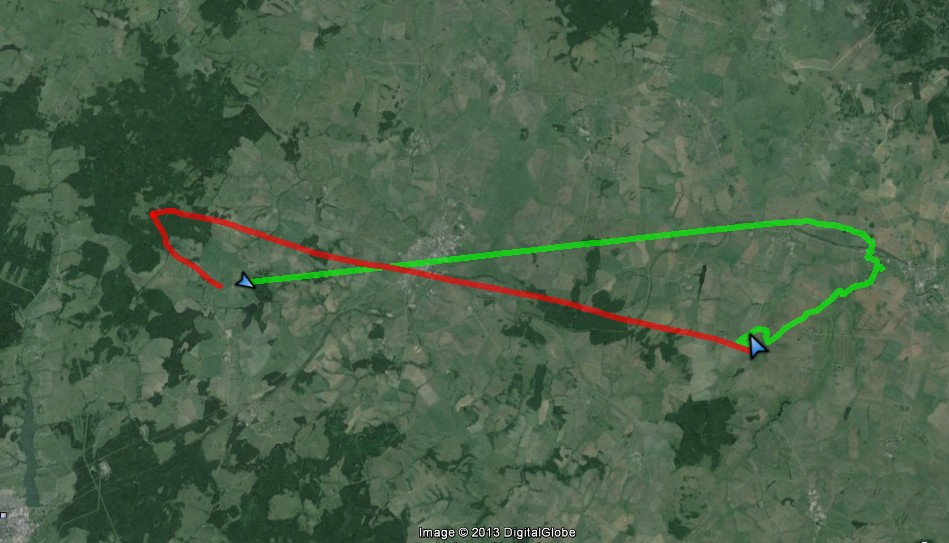
Так загадка в том, что сразу после “отстрела” двигателя самолёт стал очень стабильным (это отлично видно на зелёной траектории полёта на карте) Но тут у меня предположение, что главную роль сыграла получившаяся супер-передняя центровка, в следствии чего качество планера ухудшились но стабильность улучшилась. Это похоже на правду? И может для следующего полёта поставить двигатель, но сместить вес вперёд?
Мне кажется, автор задал свои вопросы чисто по приколу 😃 Он и сам разберется, ставить ли ему квадратные винты 😃
К сожалению я мало чего понимаю в принципах подбора комплектующих для самолёта и пользовался общими рекомендациями… А теперь понимаю, что нужно вносить коррективы в конфигурацию, но вот что менять и на что это влияет я не знаю.
- Судя по фото квадрифиляр направлен вверх. Значит и основной лепесток ДН туда же. По идее надо перевернуть вниз.
- В подобном полете удаление значительно больше высоты, поэтому клевер вполне подойдет.
- Если контролировать модель необходимо только для возврата домой (т.е. нос всегда смотрит в сторону базы) и КУ клевера будет не достаточно, то можно использовать квадрифиляр, но направить его вперед (и немного вниз).
Вот за этот ответ отдельное спасибо. Почему то я подсознательно был уверен, что у квадрифиляра направленность в виде пончика. Это точно, что основное излучение идёт от верхнего креста? (Яндекс как-то не смог мне быстро помочь.) Это наверно важнее удлинения принимающей антенны.
Из моих 15 стратосферных запусков один был абсолютно вертикальным и шар можно было визуально наблюдать почти до разрыва на 32км. Так что ДН всё-таки должна быть полусферой… вниз.
А нужен ли такой большой мотор и винт? Для горизонтального полета этому аппарату достаточно 100-120Вт. с двойным запасом ну 300Вт и винт соответственно меньше и складной точно лишний.
Без мотора чуть чуть не долетели. Еслиб не проблеммы с видео то и мотор не нужен.
Вот тут я и прошу совета какой мотор и винт выбрать? Но кроме полётов сверху вниз он всё-таки должен уметь летать и снизу вверх для отлаживания всего на земле.
Т.к. в режиме планирования он себя показал не плохо, то большую часть маршрута можно планировать… а для этого складной винт, по моему, лучший вариант.
При подъёме шар летит по ветру, а значит возвращаться самолёту всегда придётся против ветра… Думаю, что мотор всё-таки нужен.
Как вам это удается? То есть заходящие например на расположенный в 30км аэропорт самолеты должны следовать другим маршрутом, пока я собрался полетать в субботу?
Или вы это делаете не как частное лицо, а в рамках какой-то работы?
Делаю как частное лицо. Дату и время запуска согласовываю с ближайшими аэродромами и выбираю время, когда у них нет полётов. Правда приходится тащить свою задницу вместе со всем оборудованием километров за 150 от Москвы, туда, где нет больших аэродромов и выбирать точку запуска на отдалении от воздушных трасс.
18 км ограничение GPS обойти сложнее, но вроде есть модули , работающие до 30 км.
У меня такие есть.
А не вариант- спиралью спуститься до высоты включения gps (стандартное поведение автопилота), а уже затем возврат по координатам.
В общем- может высотный gps не так уж и необходим?
А какие автопилоты такое делают? Но там наверху ветра более 100 км/ч Лучше сразу пытаться лететь куда надо.
Видео не смотрел. ИМХО мотор оторвало потому что винт не смог раскрыться. Был ли момент, когда двигатель выключался полностью? Стоял ли ограничитель складывания винта? Я это к тому, что есть такие ступицы складных винтов, на которых лопасть может сложиться так, что не сможет принять рабочего положения при включении мотора.
Ну или причиной отрыва ВМГ был некачественный монтаж последней.
Ваш комментарий не читал, но подозреваю, что вы в нём наверняка ошибаетесь 😃 В видео всё слышно и понятно что проблема явно не в неправильном раскладывании. Монтаж то я конечно усилю, но не оторвёт ли пенопластовую опу если причина в чём-то другом?
Если учесть те температуры в которых он нормально функционировал, думаю очень неплохо. Подогрева от ходовой как понимаю не было и герметичность фюзеляжа не была идеальной.
Герметичности не было вообще. Недавно моё оборудование летевшее на стратостате на высоте 40км перегрелось… Так что я и не знаю от чего больше защищаться.
Судя по звуку отрыв произошёл на рабочих оборотах. Думаю не учли низкие температуры и как следствие хрупкость материалов при монтаже.
Вырвало шурупы из фанеры. Фанера не сильно изменяет свойства от температуры.
А что за LRS у вас?
Производитель этой ЛРСки просил ничего о ней не писать т.к. не хочет лишней рекламы 😃
Я периодически запускаю разные штуки в стратосферу. Это бывают фотоаппараты, видеокамеры, научные приборы или экспериментальные материалы. И, как правило, место приземления всего этого добра оказывается где-то в глухом лесу или непроходимом болоте. Вот и приходится потом долго пробираться по буреломам, отбиваясь от полчищ комаров, чтобы забрать камеры или результаты эксперимента. В одном из таких походов, когда я шёл по ночному зимнему лесу по колено в снегу, мне очень захотелось сделать так, чтобы из стратосферы нагрузка возвращалась к нам сама. И для начала я решил вернуть оттуда FPV управляемый самолёт.
В качестве платформы я взял Скайвокер Х8. Поставил на него 1.2 Ггц 1.5 Вт видеопередатчик с квадрифилярной антенной, размещённой на конце одного крыла, курсовую камеру с сервой наклона, ГоПрошку, лрску на 433 мгц с V-антенной на конце второго крыла, автопилот с ОСД - Шторм, дополнительный самодельный логгер, пишущий высоту, координаты, скорость, температуру и пару поисковых маяков: GSM и спутниковый. В качестве питания использовалась 4s батарея 5.8 Ач. Для выгребания против ветра поставил мотор T-Motor FCR 3542-840 kv со складным винтом 13x6.5. На земле стояла спиральная антенна на приём и ещё пара тестовых приёмников с патчем и квадрифиляром.
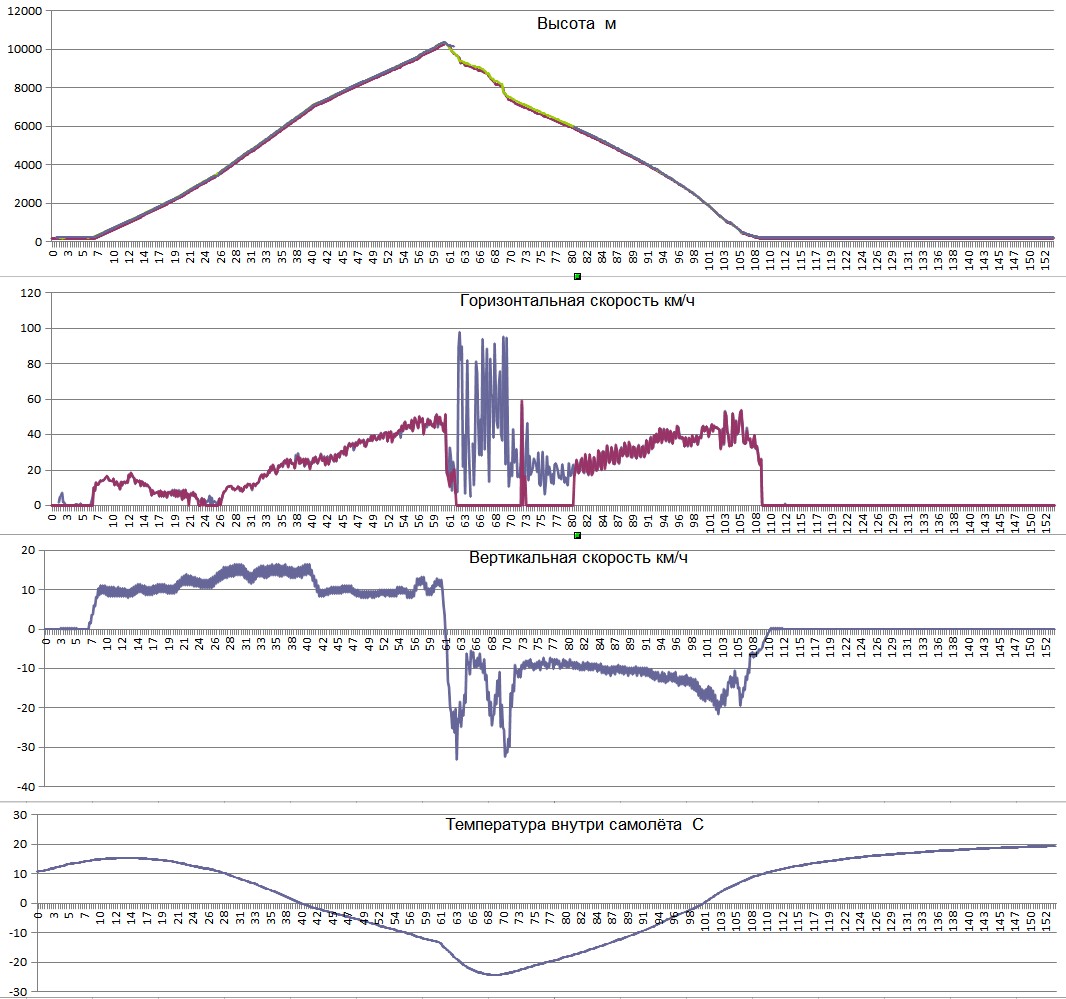
И вот провёл первый тестовый полёт. Самолёт был прикреплен к стратосферному зонду. Зонд накачан и запущен. День был облачным, и довольно долго пришлось смотреть бегущие цифры телеметрии на совершенно белом экране. Мы были очень рады, когда в кадре появились проблески голубого неба, лучи солнца и перина облаков, но уже внизу. Потихоньку мы добрались до высоты 10 км, при этом удаление было уже около 30 км. Тут уже начала пропадать видео картинка. Но лететь по ней казалось ещё можно. По крайней мере, линия горизонта была видна, а телеметрия читалась. Я включил режим отцепки и начал ждать самого интересного… Но во время отцепки, судя по всему, фал зацепился за антенну видеопередатчика, и её наклонило самым невыгодным образом. Дыра в её диаграмме направленности расположилась по направлению вперёд и вниз, то есть ровно туда, где находились мы. Соответственно, в тот момент, когда самолёт направлялся домой, видео пропадало совсем. С постоянно пропадающим видео было сложно понять, что с ним происходит, но по ощущениям его реакция на стики была малопредсказуемой. В редкие мгновения появления картинки было заметно, что самолёт пытается стабилизироваться, но что-то ему мешало. Возможно, сервоприводы элеронов замёрзли, хотя почти вся смазка из них была удалена. Температура за бортом была порядка -50 градусов. При этом высота плавно падала, а расстояние до самолёта постоянно увеличивалось. Видимо, в первую очередь виноват был ветер. На этой высоте он был около 100 км/ч. Опустившись на километр, самолёт отдалился от нас уже более чем на 40 км. Видео практически полностью пропало. Я включил режим RTH, отложил пульт и начал готовиться к работе с поисковыми маяками, прикидывая ориентировочное место приземления километрах в ста от места запуска.
Но через несколько минут на экране вдруг появился видео сигнал. Покрутив антенну и найдя наилучшее направление, мы заметили, что самолёт довольно уверенно и стабильно снижается и держит курс ровно на дом. Высота была порядка 7 км, а дальность около 35 км, и она стабильно уменьшалась. Горизонтальную скорость автопилот держал порядка 60 км/ч, теряя высоту примерно по 3-4 м/с. Мои попытки управлять самолётом вручную удавались явно хуже, чем это делал автопилот. На изменение тяги двигателя самолёт не реагировал. Как выяснилось позже, к этому моменту Х8 был просто планером 😃 То, что делал автопилот, казалось очень близким к идеальной траектории. Поэтому нам оставалось только наблюдать за уменьшающимися цифрами расстояния и высоты. На картинке мы видели лишь плотную облачность где-то далеко внизу и живописный закат, который оказался ровно в направлении точки “дома”. В течении получаса мы спорили, дотянет самолёт до нас или нет. В это время самолёт вошёл в облака и я взял в руки пульт, готовясь к попыткам помочь ему дотянуть до дома. А долететь ему оставалось всего около 5 км. К моменту выхода из облаков солнце уже зашло да и обе камеры то ли замёрзли, то ли запотели. В общем, даже линию горизонта определить было сложно. Единственное, что мы видели, это градиент из тёмного снизу в светлый сверху. Высота была около 500 м, но до дома надо было протянуть ещё 3 км. Отслеживая высоту, скорость и крен по приборам, я пытался максимально продлить полёт вручную, а опустившись до нуля по высоте, пытался в слепую посадить его. Мой Шторм (автопилот) настроен после приземления показывать максимальную достигнутую высоту и координаты своего положения. Так вот то, что самолёт сел, я понял лишь когда высотомер выдал на экран 9999 м (ещё при подъёме мы узнали, что это максимум, который он может показать). Не дотянул он до нас всего 1 км.
Когда мы дошли до координат, выдаваемых автопилотом, мы поняли, что наше крыло совершило очень мягкую посадку, но кроме загнутой антенны обнаружилась ещё одна проблема… Вместо двигателя и пропеллера зияла дыра. Позже на записи с бортовой камеры я увидел момент отрыва двигателя (6.05). Судя по видео, самолёт свалился в пике и разогнался до такой скорости, когда винт начал работать в качестве парашюта. А 30% газа, включающиеся при FS, видимо, не дали винту сложиться. Так, судя по всему, путь с 9-километровой высоты и 40-километрового удаления Х8 проделал без двигателя с очень передней центровкой.
Самое обидное, что из двух наземных писалок одна записала только подъём до 4 км, после чего выключилась, а вторая писала весь полёт, но в самом конце зависла и не сохранила файл. Соответственно, у меня есть лишь видео всего полёта с ГоПро без телеметрии и лишь с облаками в кадре и логи всего полёта в текстовом виде, из которых я сделал несколько графиков.




Теперь я собираюсь подправить самолёт и наземку и буду готовиться миновать рубеж в 20 км высоты.
P.S. На подобные полёты я получаю разрешение в нескольких инстанциях, включая зональный и главный центр управления воздушным движением, который устанавливает временный режим до высоты 30 км с ограничением полётов для других Л.А.
Многие решения явно сырые из-за недостатка бюджета и времени. И если вы вдруг готовы чем-то помочь, то буду рад.
Знаю, что написал слишком много, наверняка не в ту тему, что дурак, что наверняка убил кого-то упавшим с высоты 10км двигателем и вообще всё делал не правильно. Но пишу сюда, т.к. именно в этой ветке должны быть люди, которые знают ответы на мои вопросы, хотя слабо верю, что те, кто знают, ответят 😃
-
Почему самолёт так нервно себя вёл пока был двигатель и тяга при учёте изначально передней центровки и почему он так стабильно и хорошо полетел без двигателя, несмотря на ещё сильнее сместившуюся вперёд центровку? Возможно, что сервы, находящиеся снаружи, даже при учёте убранной из них смазки, при -60С работали слишком медленно при условии большой скорости под тягой?
-
Какой двигатель вы посоветуете поставить на Х8 для целей такого полёта?
-
Какой автопилот лучше использовать для таких полётов? Когда-то давно Smaltim дали мне полный набор своего автопилота, но настроить мне его не удалось… Подозреваю, что что-то в нём поломалось, но Тим на мои письма с вопросами так и не ответил 😦 Шторм на котором я летал в этот раз, в общем, неплохо себя показал, но сомневаюсь, что он будет адекватно себя вести на высотах больше 15км из-за ограничений GPS и установленного на нём слабенького барометра.
-
Какие антенны лучше использовать для подобных полётов в видео тракте и управлении?
Не… я совсем ничего не понимаю…
Уже давно и много летаю с этим подвесом с родным контроллером… но никак не могу понять почему сколько бы я ни крутил его дома руками, горизонт не уплывает. Когда специально иду тестировать его на улице чтобы понять причины ухода горизонта он опять стоит идеально. А стоит поехать снимать что-то по работе, как обязательно при поворотах по YAW горизонт заваливается чуть ли не на 30 градусов. Ну никак я не могу поймать зависимость… Есть хоть какие-то предположения почему у одних горизонт стоит как влитой а у других заваливается? Пробовал и включать его в разных положениях (горизонтально/вертикально), как кто-то советовал, пробовал не трогать после включения. Обе прошивки, разные настройки… ничего не помогает.
И та же ситуация с мелкой дрожью… то есть, то нет.
Давайте всё-таки найдём причину 😃
Что-то нигде не смог найти какое максимальное напряжение переваривает Шторм. Большинство летает на 3s, А 4s, 6s подключать можно?
- вообще- тушите свет:" - SPOT посылает выши точные gps-координаты и сообщения через специальные коммерческие спутники;"
Щаззз.
За 9 баксов в месяц- им дадут спутниковый канал 😂
То, что вы не смогли разобраться в принципе работы спота, не запрещает ему продолжать работать через сеть спутников глобалстар напрямую. 😃 Спутниковые каналы дешевле чем вы думаете.
Хм…
Я осуществил более 15 стратосферных запусков так что есть кое-какая статистика позволяющая сказать, что:
- GSM трекер работает до высоты метров 500… Хотите видеть полёт в онлайне, нужен спутниковый или радио трекер. Но и большинство спутниковых трекеров перестают работать на высоте 10-18км из-за ограничений в GPS чипах.
- стабилизированный полёт на определённой высоте это очень сложная задача. Шар будет подниматься, охлаждаться, спускаться из-за охлаждения, опускаться на землю, отогреваться, подниматься, иногда цепляться за ветки и в принципе может улететь как на 5 так и на 500км если вы не зададите ему уверенную положительную плавучесть.
- зона покрытия GSM мала.
- На высоте трекер может замёрзнуть и выключиться. Очень важно чтобы ваш трекер умел включаться сам когда отогреется а не ждал бы нажатия кнопки.
- Записка редко помогает. В России слишком малая плотность населения и по моему опыту слишком много непроходимых лесов и болот, которые так и притягивают стратостаты.
- Крутящийся парашют из потолочки это… ну… в общем сомнительное средство спуска. 😃 Самолёт вашего соседа наверняка лучше летал до того как у него разъехались крылья… Можно было и не резать потолочку… получился бы вполне рабочий парашют, думаю даже более эффективный… 😃
- Про получение разрешения думаю рассказывать нет смысла т.к. запуск у вас завтра а разрешение я получал месяца два.
Удачи.
Подскажите пожалуйста как лучше расположить квадрифилярную антенну на 1.2ггц на самолёте. На приём будет использоваться квадрифиляр и хеликс. Есть ли разница в горизонтальном и вертикальном расположении для антенн с круговой поляризацией? Какое расположение лучше всего для максимальной дальности и какое расположение меньше влияет на бортовую электронику?
Понимаю, что такая проблема была у многих, долго читал ветку но так до конца и не понял алгоритм действий.
Моя гекса 680мм с назой вполне нормально летает на карбоновых пропах 13х4.0 (узких) и на APC 13х4.7SF (широких). Все гейны стоят по 100%. А вот с узкими APC 13х4.0 при спуске её очень сильно раскачивает. В этой теме читал, что какраз чтобы не раскачивало надо ставить пропы поуже, а у меня обратный эффект. Пробовал занизить гейны до 90% - коптер стал гораздо хуже управляться, но раскачка хоть и уменьшилась, но осталась. Откуда появляется большая разница в поведении коптера с карбоновыми и АРСшными винтами с одинаковыми характеристиками?
Давно летаю на назе и в общем то устраивает… хотя коптер и падает иногда по непонятным причинам 😃
Собираюсь строить большую гексу или окту и вот задумался стоит ли для неё брать ещё одну назу, вуконг или может вообще что-то другое? Тут не очень понятно в какой ветке то это спрашивать, но основной вопрос - на что чаще всего переходят люди после назы?
Недавно кто-то писал, что в режиме автопосадки (при просадке акка) наза остаётся полностью управляема, только подъём осуществляется от 80-90% газа… Так вот моя нифига не поднимается даже на 100% газа. Села на склон горы, ну и, само собой, кувыркнулась. Прошивка последняя или предпоследняя, не помню уже…
Прочитал всю тему, но так и не встретил упоминания регулей Hobbywing. Кто-нибудь ими вообще пользуется? Как вам, например, вот эти Hobbywing Platinum PRO 30A OPTO ESC, стоит брать? foxtechfpv.com/hobbywing-platinum-pro-30a-opto-esc…
Летал на таких. Проблем не было кроме падения коптера из-за того, что я забыл отключить в настройках выключение двигателя при просадке напряжения на аккуме. Ну и падение коптера, когда у регуляторов протёрлась термоусадка и 2 регулятора замкнули друг на друга… Но это всё мои ошибки. Так что заказал на замену 2 новых регулятора.
BEC всего 500ma. На камеру с дальнобойной антенной уже не хватит, придется отдельный модуль питания ставить.
Если я правильно понимаю, то это линейные беки которые могут работать все вместе при параллельном (обычном) соединении их всех к контроллеру… тоесть на квадре вы получаете 2А, а на гексе 3А. А видеопередатчики, как правило, работаю напрямую от акка.
Обычно в передатчиках свой Step-Up преобразователь имеется и им не нужен БЕК.
Видимо, вы имели ввиду Step-Down, но это не важно. 😃
я не понял, они только по IC2 шине работают или с обычными контроллерами тоже работать будут?
Интересует наза и ей подобные,
Судя по описанию, изначально они работают с обычными контроллерами типа назы но если нужно и2с то достаточно припаять разъём.
Почитав тему, понял, что к единому мнению придти, конечно, не получится… А можете просто написать какие бы регуляторы, предположим 30-35А, предпочли бы сейчас вы? Ну тоесть что именно у вас вызывает наибольшее доверие? Можно 2 варианта - лучшие по цена/качество/распространённость и просто лучшие 😃