Activity
я думаю IMU сообщения идут довольно часто в процессе полета,
просмотрел на большом мониторе, или я слишком дословно понял подтверждённое картинкой “смотрите сообщения IMU”, или ещё что изменилось, но у меня данные пишутся под “заголовком” RAW:

полная картинка 1109×572 105Кб
я правильно понял ? - особо заморачиваться с виброразвязкой смысла нет ?(сейчас плата стоит на обычных нейлоновых стойках)
в среднем показания идут 1.2-1.5, макс ближе к 2-2.2 (это с работающей на среднем/максимальном газе ВМГх4).
плюс подскажите таки 😃
“вялость” отработки команд с пульта, и вялость “парирования” наклонов в разные стороны (держал работающий на макс тяге аппарат над собой, и наклонял его по разным азимутам), это одного поля ягоды или нет ?
Т.е. команды с пульта могут отрабатываться контроллером также “грустно” как и по показаниям гироскопа/акселерометра ? (в смысле по одному и тому-же “каналу”).
И не стоит (условно) копаться в р/аппаратуре, если не настроена на быструю отработку сама плата, так ?
для отлавливания вибраций, обычно строят графики (по данным из лога) и по ним смотрят вибрации
Всё верно, именно так.
Зачем поиск?
А как именно (кроме долгого скроллинга) можно сделать вот это ?
When the Log Browser appears, scroll down until you find any IMU message.
Взято как раз из текста, линком на который вы ответили на мой вопрос 😃
На небольшом и инерционном экране ноута эта та ещё “развлекаловка”.
По правой кнопке мыши ничего “помогающего” не всплывает, по Ctrl+F тоже.
А тупо жать PgDown/PgUp (чтобы найти нужную строчку от IMU) не ковайно 😃
P.S.
может быть конечно у этой функции программы есть иной вариант использования, но я его “в лоб” пока не обнаружил.
Просмотрщик логов (есть что удобнее чем “встроенный” в MP ?)
Приветствую !
Ловлю остатки вибраций на раме, для этого пишется лог (через Def+IMU), но искать потом в многомегабайтном логе нужные строчки тяжко (фильтра для поиска не нашёл, сортировки в таблице также не нашёл).
М.б. есть что внешнее, поудобнее ?
Спасибо.
З.Ы.
LogView пока задействовать не успел 😃 (нормальный монитор+комп будет доступен вечером).
Вопрос по PID_ам
Приветствую !
В какую сторону смотреть ?
Есть старая и проверенная рама квадро-Х, моторы от ТМот 740КВ, пропы 12х3.8, межосевое (по диагонали) чуть больше 80см.
Всё отбалансировано, вибрации по минимуму, поставил на это железо CRIUS AIOP v2.0 + MegapirateNG 2.8R3.
Плата контроллера стоит (пока?) без виброразвязки.
С PIDами по умолчанию аппарат довольно энергично “бросало” из стороны в сторону:
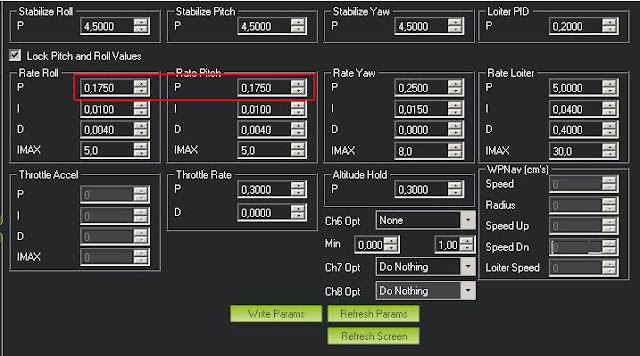
После грубой подгонки Rate Roll/Pitch (c 0.175 до 0.04) аппарат стал почти адекватен, смущает только что отзыв на стики происходит в совсем крайних положениях оных.

То есть я не могу удерживать аппарат в висении, работая стиками “на упреждение” при первичных “кивках” по ветру. Машинка отзывается когда стики двигаются уже в почти крайние положения, естественно, при этом еле заметный первичный “кивок”, переходит уже в довольно энергичное перемещение.
До этого на этой раме стоял кролик, и висение отрабатывалось “на рефлексах” - малейшие колебания рамы/лучей парировались пальцами в маленьком диапазоне у центра.
Но кролик иногда (и довольно непредсказуемо) показывал свою мартовскую прыть 😃
Поэтому и был перекинут на дешёвую фабричную раму, просто для “побаловаться”.
Спасибо за отзывы/советы.
З.Ы.
чтение кучи инфо естественно в процессе, но хочется быстрее “зацепиться” за нужное, а то лето уже вот-вот… (а успеть хочется многого).
Только хотел их заказать(((
Ребята, может кто нибуть подобные шасси порекомендовать? Но без таких косяков, проверенные))
Шпокойствие ! Только без паники 😃
Набор неплох для “творческого” подхода (отдельно виброподвесы стоят примерно столько же как и сам набор, ну +/- конечно).
А под “сделать по уму” на том же ГЛБ есть и вот такие штуковины:
- 4pcs 12mm Tube Fixture for ATG XA600 Z550 Quadcopter
- FC Glass Fiber Double Battery Mounting Plate Rubber Anti-vibration Board D12 for Quad HexaCopter 12MM tube
- DIY Fixture Set for 12mm Carbon Fiber/Aluminium Tube Multicopter
Под свои нужды можно подобрать различные варианты, ну где то конечно напильничек/сверло 😃
м.б. отдельно трубки, стойки шасси, ДОП цацки… - калькулятор в руки и вперёд 😃
тем более что пока посылки ходят на удивление быстро - 2-3 недели, почтовики говорят что ЛЕТО, отправлений мало, вот и работают “как раньше”.
Небольшое предупреждение
Купил на GLB шасси + виброразвязанный подвес под камеру
ATG Universal DIY FPV ANTI-Vibration Multifunction Landing Skid Kit for DJI F450 F550 Quadcopter Hexacopter
Есть косяки, по материалу и по точности.
- С-образные клипсы на перемычках ОЧЕНЬ хрупкие, при сборке действовал “на упреждение”, установил всё путём натягивания (не защёлкивания), но в итоге чуть заденешь рукой - трещина или на С узле, или на одном из “лучиков” от основания к С-ке.
На картинке они справа, 3шт (+2 в сборе сверху).
- опять таки - парочка С-образных (+О посадочное под перемычку между “лыжами”)
На саму перемычку не натягиваются - болтаются, слишком разные диаметры (лечиться подматыванием фумленты).
На лыжи защёлкиваются, но с запасом, от этого вся поперечина гуляет сама по себе 😃 (вперёд-назад).
На картинке они чуть ниже “грузовых” подвесов, примерно такие --С
Но в отличии от монтажно/подвесочных перемычек даже не думает трескаться… (хотя не раз отстёгивалась при встрече с землёй).
На сайте оставил нейтральный отзыв (у комплекта есть и плюсы), но скорее всего модерацию не пройдёт 😃

киньте ссылку плиз у кого под рукой, как правильно настроить пиды и что это такое - так и не понял еще.
Хоть и на примере мегапирата, но по ПИДам разницы нет 😃
Написано/рассказано адекватно (не копипаст который гуляет по множеству сайтов/страниц).
жмём мышкой
Отправляйте его (взор) сюда . На скрине видны вкладки 1 и 10 каналов.
Сработало, развернул второй канал и стало как надо 😃
Спасибо.
поставьте реверс на пульте и всё, можно в прошивке в планере, в закладке калибровки аппы есть чекбокс “реверс” и будет Вам счастье
в передатчике не хочется, ибо есть ещё игрушки которые управляются с неё, и как показывает опыт турнига иногда может “не переключиться” по сеттингам (для каждой модели свой слот памяти).
а вот в планировщике попробую, спасибо.
З.Ы.
во время “плясок с бубном” встречал имитацию переключателя рядом с авиагоризонтом, что-то там про “РУС моде”, и он “зеркалил” отображение.
это не про него ?
кстати, попутный вопрос…
при калибровке стиков линейки (в планировщике) заполнялись следуя за движениями оными, т.е. “отзеркаливания” не было…
Приветствую !
Подскажите pls - куда взор направить ? 😃
Свежесобранная пара CriusAIOP v2.0 + MegaPirateNG 3.8 R3.
Присутствует “реверс” по каналу тангажа - “от себя/на себя”. (хорошо что заметил на подгазовках при проверке уровня газа для отрыва).
При этом направление и крен совпадают с движениями стиков как надо (газ само-собой).
т.е. если развернуть коптер задом наперёд, то начнётся “реверсирование” по крену.
Авиагоризонт в планировщике миссий “привязан” и отображает наклоны платы верно, направление вращения моторов согласно схемы.
P.S.
Во время пробного знакомства с MultiWii, в её GUI моторы “ходили” за азимутальными движениями стика крена/тангажа тоже правильно.
копаться в сеттингах ? или есть незамеченный переключатель/кнопка в планировщикемиссий ?
В помощь другим новичкам 😃
Калибровка акселерометра и гироскопа для связки MegapirateNG и Missionplanner
Контроллер Crius AIOP v2.0
В моём случае наконец то “сработало” после замены USB шнурка + неожиданно вышло обновление для планировщика миссий + решил ПРОШИВАТЬ контроллер выставив его строго по горизонту, что именно сработало не знаю, но авиагоризонт так и “заваливался”.
Зато в терминале с первого раза прошло и соединение, и калибровка.
Картинка:

После калибровки авиагоризонт встал так как надо…
ссылка на запись в дневнике:
настройка шаг за шагом
устанавливал другие прошивки, и megapirateng тоже пробовал но результат один движки не реагируют на команда с пульта.
а в планировщике миссий (речь про мегапирата) лимиты передвижения стиков задавали ? (там есть закладочка в которой тестируется/прошивается движение каждого стика по обеим осям), вот после того как пройдёте этот пункт, моторы начнут и армиться и вращаться после активации (на авиагоризонте будет видна надпись Arming|Disarming).
речь вот об этом:

тут как раз видны “раздвинутые границы” (красные полоски которые остаются после макс и мин положения каждого стика).
А по каналам с аппы в гуи какие показания ?
аппарат в горизонте:
min.газ 1052 моторы 1170 (тут точные данные, все моторы дают одинаковые обороты).
mid.газ 1470 моторы 1650 (1300) (тут уср.-примерные)
max.газ 1880 моторы 1900-2000 (1600-1700)
жирным шрифтом тот самый - 4й мотор (задний левый)
зря занизили минтроттл, он должен быть комфортный для моторов, чтбы ни в коем случае не остановились
да тоже берут сомнения, но это значение “грубое” приближение для арминга (до этого не получалось запустить).
само-собой чуть попозже “отполирую”.
- В мегапирате такие же проблемы как в вии?
- Запоздалый запуск мотора обычно говорит об неоткалиброванном регуле на этом моторе.
- Да.
- Нет (на другом контроллере всё было отлично, но ради интереса перекалибровывал (просто не написал об этом выше)).
- уточню - он запускается через раз - может стартануть вместе со всеми, а может стоять.
Это немного косвенно - м.б. я просто слишком занизил “холостой” ход в сеттингах, а моторы “блинчики”.
Если персонально ЭТОМУ мотору дать газ на максимум, то он достигает таких же значений как и остальные до такого акцента (правым стиком (м2) в его азимут).
Т.е. диапазон газа мотор+регуль отрабатывают.
- ещё что заметил - если заливать мультивия и калибровать в GUI то показания авиагоризонта стоят в “плоскости” (хотя при этом газ “причёсан” всё равно только по трём моторам).
а если залить мегапирата, и пользоваться missionplanner, то авиагоризонт завален как раз на это направление (или от этого мотора - сейчас знак точно не вспомню).
Т.е. авиагоризонт можно увидеть в планировщике “правильным” если диагональ от ПЛ-ЗП мотору оставить в горизонте, а диагональ ПП-ЗЛ наклонить примерно на 45гр.
Приветствую !
Ищется причина/решение “отставания” одного из моторов на Х-коптере.
Плата AIOP v2.0 от Crius, акселерометр в GUI MultiWii откалиброван, моторы соответствуют номерам, авиагоризонт наклоны отображает верно, ошибок по шине i2c нет.
Моторы и регуляторы с другим контроллером (кролик v1) летали без замечаний.
Сейчас коптер при “разгрузке” пытается завалиться по диагонали, отстаёт задний левый мотор (он и при арминге не стартует на “холостых”, запускается только при “подгазовке”, и потом вращается при убранном в минимум газе).
В GUI показания этого мотора отстают на 200-300 (если три из 4х в горизонте синхронно показывают 1700-1800, то тот о котором речь 1300-1400).
В различных ветках видел что народ уже сталкивался с этим, но увидел пока только одно “решение” - сбросить PIDы в ноль (но это мягко говоря не… хотя и срабатывает… ).
По каким ключевым словам искать решение ?
Спасибо !
P.S.
плата внимательно просмотрена, промыта, явных “сюрпризов” нет.
Парни приветствую !
Копаюсь в свежеприобретённом CRIUS AIOP v2.0
не могу понять строчку в ArduCopter.ino:
// Compass must be initialized after INS, because in case of using MPU6050 it must be switched into bypass mode
на моей платке как раз и стоит этот MPU6050, и вот как раз его не получается откалибровать (планировщик показывает завал направленный от заднего левого мотора (Х-вариант рамы)).
та-же самая ерунда была когда заливал прошивку multiwii, но в её ГУИ можно было откалибровать аксель.
то что нашёл в сети не помогает (хоть в старом, хоть в новом планировщике).
крыжик рядом с “калибровкой” (про 3.0) снимал, вариант с установкой рамы на боковые плоскости (ставим+нажимаем, повторяем с другим боком, и т.д.) пробовал.
из мыслей только промывка платы…
рекомендую всем новичкам ПИДы не трогать пока коптер просто не взлетит, а то накрутят по инструкции и начинается тарабарщина. у меня на стандартных очень даже неплохо летает
ну вот в моём случае ПИДы по умолчанию привели к тому что задний левый мотор (в Х-варианте) довольно сильно “отставал” от трёх остальных.
если ему персонально давать газ - то до максимума он “раскручивался” без проблем, но вот в горизонте (при нейтральных крене и тангаже) нет.
поиском нашёл что случай не единичный, из “решений” - сбросить всё в ноль, на моём железе это помогло, теперь буду потихоньку “подстраивать”.
чем вызван такой эффект пока не искал, вибрации исключены на 99,999%, если только акустически 😃 , плату держал и в руках, и крепил на стойках (промывать от флюса ещё не пробовал).
моторы и регуляторы скорее всего тоже не при чём (на контроллере другой марки такого эффекта не было).
Разделение на куски - не очень. Если планируете отслеживать комментарии и отвечать на них - лучше делать это в одном месте.
Ну тут вот какой момент… всё в одной статье это мало удобно, и писать и читать.
Как сейчас сделано - тоже не фонтан…
Я думал будет список постов по заголовкам, т.е. читаеш заголовки СПИСКОМ, в конце каждого метка для “открыть”.
А пока получается - “ни вашим, ни нашим” + задом наперёд.
Один пост виден не по заголовку, а по началу ВСЕГО текста, + иерархия идёт от последнего к первому.
Т.е. задумка есть “осваиваю” каждый этап - пишу… т.с. шаг за шагом…
А тут получается “кино наоборот”.
P.S.
вечером посмотрю что сделано стартового в wiki, м.б. будет смысл транслировать и туда.
Вот в таком ключе стоит продолжать ?
Подключение Настройка Регулировка MultiWii (на примере Crius AIOP v2.0)
- как в самом начале своего блога скрывать “простынь” поста, оставляя только заголовок ? (чтобы было проще пробежаться по заголовкам и открыть/развернуть только нужный).
Но потом разобравшись со своим железом быстро исчезают из поля зрения.
MultiWii ? быстро ? от начала и до конца ?
Скорее “осваивает английский” или начинает пользовать другие ресурсы, (это не “камень в огород” форума).
Лично мне проще было по вопросам кролиководства переписываться в личке, и/или бродить по сети, но кролик своеобразный пласт “мозгов”.
Доходило до того что синхронно с одной светлой головой из штатов начали копаться в GUI продукта, пару-тройку раз пересеклись в личке “по профилю”.
Я ограничился адаптацией к русскому, а чел переписал софт с нуля, создал совершенно другой GUI, но в итоге устав от постоянных “нововведений” китайцев (к каждой прошивке китайцы “подпиливали” и GUI) + от многих схожих сюрпризов, попросту перешёл на другое железо.
C ветки кролиководов я тем не менее никуда не исчезаю 😃
Да, периодически в темах форума появляются этакие Робин Гуды. Которые готовы писать фак-и, редактировать шапки и т.д…
но “старожил ы” - продолжают есть кактус (С) ? 😃
а кстати, кто заявлял что “готов писать FAQ и редактировать “шапки”” -? (если про мои недавние посты, то это мимо, я спрашивал “а почему такого нет ?”, хотя ещё раз повторюсь - УЧАСТВОВАТЬ в заполнении я готов.)
Есть конечно некая полумера - оставлять в РЕЗУЛЬТАТИВНЫХ постах ключевые слова, точнее “якоря”, для того чтобы поисковики легче выдавали нужный результат (благо поиск легко ограничить нужным сайтом).
К примеру недавний мой вопрос про арминг на свежеустановленной плате.
***
AIOP 2.0 MultiWii арминг дизарминг моторов после установки сборки
решение редактирование в arduino
config.h (строки maxtrottle minthrottle)
MultiWii.ino (rc functions -> maxchec mincheck )
подробнее (ссылки на страницы описаний):
Первичная настройка MultiWii (от mataor)
FAQ (от omegapraim)
***
о способах “клиент” уже должен знать (газ вниз и вправо - АРМИНГ, газ вниз и влево ДИЗАРМИНГ), способ для Mode-2 (газ на левом стике).
вот такой способ “не лить воду” чем не подходит ? 😉
P.S.
ну если конечно нет желания “пообщаться” или “потоптать клавиатуру”.
млин…
написал много, но при отправке глюкануло.
вкратце:
надо пообщаться с техподдержкой сайта, в шапке РУЧКАМИ можно вбить линк на внешний ресурс (или на специально созданный ДОП).
есть большой шанс что кролиководы из соседней ветки начнут пополнять и эту ветку (с кроликом всё больше и больше проблем, и это как показывает опыт не “руки кривые” а сплошные косяки по hard/firm/soft_у этого “продукта”).
поэтому, куча букв на пустом месте, радовать никого не будут.
P.S.
а MultiWii для новичков вещь несколько своеобразная (даже для тех кто с коптерами не первый день).
- один единственный человек FAQ не потянет.
- я абсолютно не против УЧАСТВОВАТЬ в заполнении (пока всё вижу свежим взглядом, да и потом тоже…).
- появилось что “по делу” - заносим (в тот или иной раздел), есть то самое “часто спрашиваемое” (новичками) - заносим в “новичкам”.
- если движок форума малосовместим - может использовать сторонний ресур/хост ?, а в шапке банально сделать линк.
я вот сейчас в процессе ознакомления генерирую немало вопросов, что-то сразу нахожу через поисковики, что-то даже не знаю как сформулировать (точнее какие термины использовать).
современный интернет это своеобразная штука - одно и тоже событие/явление может быть описано кучей разных способов, и не факт что большинство из них будет написано ГРАМОТНО.
P.S.
вот сейчас со “своим” разнотягом, нашёл ситуацию когда человек получал 1:1, даже с номером/позицией двигателя совпало.
ну да, ПИДы сбросил в нули, после этого почти выровнялось.
внятного описания работы по настройкам этих самых ПИДов пока не нашёл, всё отрывками, или не очень адаптированный перевод с английского (иногда понятнее читать в оригинале).
но в оригинале тоже свои “моментики” 😃
А потому что распустили)))) Нефиг на все вопросы отвечать, не нужно делать из себя тех поддержку.
Предлагаю (скорее всего я не первый) сделать в самом начале ветки FAQ, в идеале разбитый по разделам.
Во многих конференциях (на том же 4ПДА), такой шаг уже обкатан, и вполне удобен (не надо следить за всеми обсуждениями, разгребать кучу страниц).
Забыл что, или хочешь узнать что нового вышло/появилось - пощёлкал в шапке спойлерами, и вуаля!
P.S.
я правда не успел ответить, точнее подумал что “издевается чтоль ?”, ну когда увидел почти свой же вопрос 😃 (этот же момент поднялся в “подбор комплектующих”, но пока искал свой стартовый вопрос в этой ветке (чтобы дать линк), модераторы в той ветке “подчистили”.
А по каким моментам искать решение “разнотяга” у моторов ?
Моторы+регуляторы управляемые предыдущим контроллером (кролик) работали так как положено.
Сменил “мозги” на AIOP 2.0 - заметил на “газовках” что один мотор отстаёт, проверил в GUI - точно.
Если 3 дают 1700-1800 оборотов (на стоящем в горизонте и безвинтовом аппарате), то этот 1300-1400.
Перекалибровал регуляторы отдельно/повторно (все сразу, через адаптер, на 3й канал и газом с пульта).
Калибровка судя по “голосам” прошла как положено.
Вернул всё обратно - эффект остался.
Если давать с пульта этому мотору основной приоритет, то он спокойно выходит в те-же 1700-1800.
P.S.
config.h под свои моторы/аппаратуру уже “подогнал” (мин/макс и холостой ход, до подгонки вообще не армились).
Уже второй раз моя гекса на первом кролике делает кувырок в воздухе и летит вверх тормашками. Даже не знаю что делать. Двигатели, после падения, продолжали крутить винты, не смотря на попытки отключить через аппаратуру. Просто 0 реакции. Пришлось питание отрубать.
Почти 1:1 как и в моих случаях, только у меня сразу удавалось и сбросить газ, и задизармить.
А остальное именно так, причём летали на одной и той же площадке (т.е. смены магнитного поля/давления или ещё чего нет).
rcopen.com/blogs/117417/17077 в этой теме уже пару раз давал ссыль.
Виртуальный пирог с надписью “кратко и по существу” отправляется в Брянск 😃
(сработало в плане вычисления “среднего” и записи результата в MultiWii.ino (rc functions -> maxchec|mincheck)
Я попросил вас сделать видео а не рассказывать мне что у вас там.
“предложил” + “уточните что отображается в ххх/zzz/yyy” звучит намного конструктивнее, хорошо ? (это намёк в сторону ненужных эмоций)
Вы сами представляете что я могу “наснимать” прочитав фрагмент фразы “выкладывать видео GUI” ? (особенно чтобы было видны данные, да так чтобы не ломать глаза).
Сделать скриншоты- без проблем (на них гарантированно видны все детали).
Мне как новичку в мультивийном “срезе” очень хорошо видны множественные “неточности” и “нестыковки” в различных описаниях одного и того же - глаз т.с. “не замылен”.
Вам м.б. после долгих “ковыряний” и наличии некоего опыта общения с этим железом, достаточно будет намёка от коллеги по владению таким контроллером.
Так что давайте учитывать такие “тонкости”.
rcopen.com/blogs/117417/17077 в этой теме уже пару раз давал ссыль.
Спасибо !
пошёл изучать 😃
Если не армится, увеличивайте end points на пульте.
а это не тоже самое если “подгоню” данные в config.h ? (maxtrottle & minthrottle)
Кстати, хочу спросить/уточнить…
в лежащем в сети AIOProssetup.docx как минимум на двух картинках, на плате отдельно подрисована стрелка направления(перед).
и она не совпадает с белой стрелкой нанесённой на самой плате.
платы не новые, но… зачем ? (ведь в конфиг файле направление сенсоров можно менять).
моя платка AIOP 2.0 установлена на раму согласно нарисованной (на гетинаксе) белой стрелке:

авиагоризонт в GUI отображает наклон и крен строго за теми движениями которые делает в руках рама с установленной на ней платкой “мозгов”).
Надо упомянуть, что если вы не делали калибровку акселя (что важно) двигатели не запустятся
Сделал, пока не помогло.
В GUI работа обоих стиков по всем 4м направлениям "живёт"и адекватно движениям отображается.
Но с армингом тишина.
На пульте Mode2 (газ и направление слева, крен/тангаж справа).
Показатели в GUI:
левый:
(thr(газ)) вниз-минимум, вверх - макс.
(yaw(курс)) влево-мин, вправо-макс.
правый:
(roll(крен)) влево-мин, вправо-макс.
(pitch(тангаж)) вниз-мин, вверх-макс.
надеюсь что тут ничего инвертировать не надо ? (или нет ?)
авиагоризонт в программе “связан” с эволюциями самого квадрика, отображает всё правильно.
акселерометр калибровал выставив аппарат в точный горизонт по горизонтальной плоскости (на лучах стоят (под 90гр) пара пузырьковых уровней).
арминг пробовал в том же положении.
пины на плате соеденены с приёмником:
15-ch6
14-ch7
13-ch5
12-ch8
11-ch4
10-ch2
9 - ch1
8-ch3
- ch3(vcc)
- ch3(gnd)
моторы на 2.3.5.6 (по ним же приходит питание срегуляторов).
если шьёте через USB то неважно какой тип программатора выбран
да тут похоже классические “барабашки”
на ноуте один раз при выставленном parallel прошилось до конца, но ОДИН раз, повторно уже не захотело 😃
само собой - питание на плате отдельно от USB (от регулей и АКБ).
перебрался на стац.комп, там всё стало шиться стабильно (каждый раз).
на ноуте через USB шьётся МНОГО чего, никогда подобных “нестабильностей” не было (включая пару-тройку мобилок которые шьются этим же шнурком).
а вот стац.комп такой стабильностью не блещет.
вот такая вот “загогулина”…
предполагаю что стоит попробовать найти совсем коротенький шнурок…
сейчас “не могу пройти уровень” 😃 с армингом мультивия.
в ГУИ индикаторы стиков (Turnigy 9x c родной прошивкой) живут и выдают:
thr 1050 1878 thr
yaw 1050 1465 1878 rud
pitch 1050 1479 1878 ele
roll 1050 1461 1877 ail
если при прошивке ставить “холостой ход” от 900 до 1100 то моторы по окончанию процесса стартуют (как раз в минимальные обороты), но на управление не реагируют.
если “залезть” за 1050 то картина остаётся та же самая.
менял параметры E.Points в настройках пульта - индикаторы GUI (в средней части) остаются на месте, меняются только крайние min/max значения.
баловался с 3мя кривыми в D/R EXP - реакции в GUI вообще нет.
менять в сеттингах “мёртвую зону” ? (значения получаются немаленькие).
если банально триммировать (“железно”) то значения в зону 1500 загнать можно, но это судя по отзывам неправильно.
армить пробовал двумя известными способами (газ в нижн.прав угол) или (крен в право).
реакции нет.
Насколько ВООБЩЕ стоит ловить именно 1500 ? (для арминга).
вот этого не учёл - спасибо за подсказку.
а тип программатора оставить как AVRISP mkII ?
драйвер стоял самый последний, а вот тип программатора в tools->programmer надо было ставить parallel (по умолчанию стоял иной + его смена на остальные (кроме параллельного) приводили к одному и тому же результату - вроде пишет, по крайней мере прогресс индикатор начинает заполняться, но потом останавливается с или без сообщения об ошибке).
пойду “копать” дальше 😃
всем спасибо !
может драйвер обновить
вот этого не учёл - спасибо за подсказку.
а тип программатора оставить как AVRISP mkII ?
да поначалу так и ставил.
но прогресс бар при заливке софта доходит до примерно 80-90% и останавливается, несколько минут процесс никак не “отзывается”, потом сброс и сообщение о превышении ожидания таймаута (пишу по памяти)
если брать какие-то иные “сеттинги”, например отсюда: http://www.multi-rotor.co.uk
то при прошивке вполне ожидаемо выскакивают ошибки “по делу” (неверные параметры настройках и т.п.)
плата запитана от регуляторов, по УСБ питания тоже хватает, на всякий случай “сдвинул” с полученного 22го COM порта на 5й.
скорость 115200.
Плата выбрана как ArduinoMega 2560 or MegaADK
пока никак не получается (прошить до 100%) и получить сообщение об удачном окончании.
Подскажите новичку PLS.
приобрёл в доп/(замене) кроликовому контроллеру вот такую платку:
AIOP v2.0
сейчас пробую залить софт, но слегка так уже запутался с файлом config.h, вызывает сомнение то что именно этой платки в списках нет, а “железо” которое установлено на ней, встречается в той или иной “чужой” конфигурации.
на страничке продавца есть линк на архив прошивок:
MultiWii FW
плюс перед покупкой находил совместимый? софт:
MegapirateNG
В принципе основной вопрос в том что, - одолжите проверенную сборку для этой платы, а уж “копать” буду в процессе знакомства.
а то сейчас и толком подрубиться через GUI не выходит (или плата в продаже “чистая”, или какие другие моменты не стыкуются (ком порт не очень понятно отзывается)).
Спасибо !
и снова в теме жалуются на кроля, и предлагают AIOP и иже с ними
да не особо и “жалуются”, просто идёт “делюсь наблюдениями” (того что код сырой), а попыток улучшать нет. 😦
железо разошлось по всему миру, энтузиастов, причём грамотных море.
взять того же KKUSA - чел написал свой GUI, который намного удобнее того что “намешали” китайцы.
но китайцы видимо и жадничают и стесняются открывать свой код (а причина - деньги и(или) позор от того что толковые парни увидят что и как было использовано).
зато уже полезли делать второго кролика…
опять-таки, я не агитирую “кролик отстой”, сам контроллер по железу весьма недурен (ну почти 😃 ), “убивает” его (в паре с софтом) непредсказуемость.
Но “Кхм” настораживает и расстраивает, блин…
ну как минимум то что он “накапливает” косяки, т.е. код не отладили, много “затычек”.
замечено не только мной - вроде только-только отладил, можно сказать уже “процесс наслаждения пошёл” (после того как подобрал под свои “хотелки” все регулировки и параметры).
аппаратец радует день-два, потом (непредсказуемо по срокам) начинает чудить.
при этом ни в железе, ни в настройках не менялось НИ_ЧЕ_ГО.
у меня ОЧЕНЬ наглядно произошло во время передачи аппарата для “поподлётывать” в руки ребёнка.
до этого я отрывал его от поверхности и медленно, и быстро (всё ловил работу сонара), когда немного поднадоело + видел что киндеру тоже хочется - передал весь комплект.
несколько раз всё было вполне спокойно (опыт у ребёнка есть), а потом не успев толком разгрузить шасси, аппарат РЕЗКО подпрыгнул и в процессе прыжка сделал сальто с “втыканием” спиной в грунт.
причём в высоту даже толком и не успел…
дитё только и успело как газ вниз (там и движения то толком не было) + сразу задизармить.
все винты целые (только следы на “спинках” от гудрона).
потом нечто схожее было и в домашних условиях, уже у меня, хорошо что всё происходило над мягкой поверхностью + внимание было занято строго на мягком отрыве от “земли”.
вчера тоже - перешил мозги на 1.231, начинаю армить, кролик начинает “дышать”, отпускаю стик - кролик дышать перестаёт…
покомбинировал по разному, в итоге решилось только повторной перешивкой (причём перешиваю всегда с полным сбросом (ставлю перемычку)).
а про “претензии” к GUI_шному софту, ну как сказать…
лирика ВКЛ
вот условно говоря (не вдаваясь в подробности) можно ровно вкопать пару столбов, закрепить на них пару горизонтальных направляющих, да и поприбивать вертикальные доски, в итоге получить ЗАБОР.
я специально не уточняю про расстояние, разметку, уровни, подготовку полотна на земле и проч “тонкости” уровня распиловки/строгания/покраски, всё это мастер (или даже просто рукасто-головастый домохозяин использует/применяет по определению).
а можно время от времени находить куски проволоки, плёнку, картон, может быть даже доски, ну и “крепить” ЭТО с разной периодичностью между чем-то “подходящим”.
пусть оно само по себе местами отваливается, рвётся - перекрыть прям поверху ведь можно ? 😃
и в первом и во втором варианте название будет ЗАБОР.
а вот реальное положение дел будет отличаться заметно.
причём в процессе поиска причины глюков работы с сонаром, тоже самое мнение пошло и в сторону железа.
знакомый матёрый разработчик долго удивлялся - “ну как можно “сэкономить” сущие копейки, и при этом получить такую непредсказуемую (и чувствительную к малейшим “шероховатостям”) схему!”
лирика ВЫКЛ
я конечно сильно сгустил краски, но вектор идеи понятен.
да, не спорю - кролик в своё время запустил “волну” (может она была и не самой чистой и красивой, но…), но по прошествии долгого времени, эта волна так и не изменилась (в лучшую сторону).
Сейчас вместо развития, кроликоотцы банально дискредитируют саму идею, вместо улучшения - топчутся на месте, вместо исправления ошибок - добавляют новые.
В общем - лично для себя взял ещё одни мозги, на этот раз AIOP V2.0, по крайней мере (после копания форумов) надеюсь что фирмварописатели там НАМНОГО адекватнее.
Кролик_а поставил на свежесобранную небольшую “пилотажку”, пусть просто летает (но без дорогой фото-видео аппаратуры на борту).
Дальше посмотрим.
А это для какого Кролика, 1 или 2 ?
для первого точно (v.1.231)
каков GUI для второго - ну совсем не в курсе. 😃
если они GUI так делают 😠, то тогда понятно почему firmware для самих мозгов такое, кхм… (своеобразное) (тут хочется вставить ОЧЕНЬ своеобразный и нецензурный смайлик)
Попробуем “причесать” GUI ?
Приветствую !
Хоть от кролика всё больше и больше “не в восторге” (точнее от подхода узкоглазых к качеству продукта), но тем не менее…
Пытаюсь уменьшить многочисленные “и так сойдёт !” которые наклепали эти “творцы” 😃
В общем полез в очередной раз адаптировать… (примерно год назад уже выкладывал “обработанную напильником” версию, получилось синхронно с KKUSA, о чём оба взаимно улыбнулись, но у человека в последствии руки опустились 😦 (и я его ОЧЕНЬ понимаю, ибо в проге бардак страшный…)).
Прошу заинтересованных кролиководов проверить/уточнить/подсказать значения кнопок в программе настройки (причём желательно по реальному опыту использованию оных).
За основу взята свежая 1.231, сейчас первоочередное это не внешн. вид (параллельно/перпендикулярно и ровно), а именно правильная адаптация.
Графику попробую “причесать” после.
Итак: