Activity
Включаешь пульт - соединяется и мотор редуктора начинает беспрерывно крутится в одну сторону. Хоть ты жмешь на пульте поворот хоть нет.
Проверьте повода которые идут к сервоприводу руля, есть предположение что один из них оторван
Нижнюю плату, которая крепится к ножке с камерой тоже залили? Цапонлак уже не актуален?
нижнюю тоже, цапонлака небыло (не в курсе как он смывается), а пластик можно в случае чего смыть ацетоном
На подвесе открыты все электронные платы. Кто нибудь герметизировал их?
Я свой Plastik-71 залил, летает не жалуется 😃 с чистой платой стрёмно, одну каплю воды поймать “удачно” и всё…
На плату подаете 4S или 11В после преобразователя?
4S питание коптера, 11В питание подвеса через отдельный DC-DC
У этого продавца никто не покупал?
Покупал, летает на 4S, правда через DC-DC от 11в, так стабильнее будет 😃
разве что на другом компе не пробовал. но ведя надо запустить на этом.
Проверь на другом, заработает отлично, будешь с системой разбираться, если и на другом глухо то с платой. Может у тебя виндовс подурел уже от обилия драйверов, переустановка чистого поможет.
Бронт в Москве стоит 5600 рублей, меня от него отделяет 30 мин на метро. Самый дешевый 12891 на Али стоит 5400 руб и 3 недели ждать доставку. Вы о чем вообще говорите?
О там что выдал Али и то что встречалось на ютубе, 12891 мне обошёлся в 77$. Бронтозавра видел за 150$ и 170$, может мы и о разном говорим, но тогда можно ссылку на ваш вариант и цену в $, в Москве это хорошо, но ведь не все мы там 😃
Купил и себе такую, на штатном аккуме 10-15 минут на паре самсунгов высокотоковых 25r пол часа гоняет. Накатал всего 3 аккума (1 штатный, и 2 самсунга) из поломок на днях крестовина передняя распалась (выпал штифт) на заднем приводе по грунту неочём. Дома не спеша собрал её назад на фиксаторе резьбы, посмотрим как будет жить дальше. Бронтозавр это может и неплохо, но для первого автомобиля дорого… А этот вполне устраивает из коробки, а там посмотрим 😃
Это был то ли 32, то ли 34 акб, несколько раз забывал записывать факт покатухи.
Как насчёт выработки на чашках? Или в других местах после такого использования? 😃 Интересно что меня ждёт впереди 😃
взял с рук настроенный и сбалансированный
Спросите у продавца на каком напряжении настраивали, такое и подайте 😃
Почему подвес не справляется? Что мне нужно крутить? Пиды или виброразвязку самого подвеса?
У меня было тоже самое на видео, помогла замена демферов на тросики и минимальная балансировка пропеллеров (но это уже на сдачу)
настраивал уже запаянный в ручную вводя команды в терминал из конфигуратора шторма
а какике команды вводили?
Версия мобильного приложения какая?
А имя назначить позволит?
честно говоря непомню, если имя принципиально подключите через USB переходник (CH340 например) и поменяйте через терминал или через утилиту BTinit.exe, заодно проверите в каком режиме он откликнется, должен в режиме Linvor, а мои все как HC05 отвечают…
Блютуз можно будет настроить потом уже на плате, или надо изначально подпаяться к UARTу и настраивать его каким-либо особым образом?
Как я понял можно и потом, но там то и настраивать нечего (имя, пароль, скорость), конроллер его увидит перебрав все возможные скорости порта и на которой получит ответ будет работать. Затык у меня происходит как раз из-за новой прошивки HC-06 модуля, он отвечает подругому, режим АТ команд другой. Поэтому контроллер его не “видит” 😦
так крайняя под старый сенсор вроде как 0.96
это я знаю, смысла особого нет искать приключений когда всё работает, очень сомневаюсь что это исправит проблему, со старыми модулями вопроса небыло, а вот после обновления… Хотя может и обновлю потом как последний из вариантов, если подругому вопрос не решится
прошивка старая под стандартный сенсор или новая NT ???
старая, под обычный сенсор, 80я вроде
блютуз модуль тут работает просто как VCP-UART , ничего сверхъестественного …
оно то вроде так, но судя по всему STorM32 опрашивает модуль, а ответ получить неможет из-за несоответствия АТ команд и считает что его нет 😦
Заказал у китайцев Bluetooth модуль HC-06, приехал с новой прошивкой, подписан при поиске как HC-06, телефон его видит, STorM32 отказывается видеть…
Подключил к адаптеру, через утилиту BTinit.exe он откликается в режиме HC05  (картинка не моя, из интернета)
(картинка не моя, из интернета)
Заказал у другого продавца распаяные на платы HC-06 с четырьмя выводами, пришли и ситуация таже. Пробовал заливать прошивку старую Linvor 1.8 модуль не поднимается с ней 😃
Есть мысли что можно настроить его через PSTool.exe от BlueLab, но информации нет, может кто что подскажет? А то уже три модуля лежит, а толку 0… 😃
Напряжение видит. Но почему-то пишет, что моторы отключены. Ведь для бесщеточных моторов без разницы как подключать обмотки (ведь на контроллере стоят PLS-ные разъемы без ключей)? И что значит “STorm32-Link недоступен”?
вы бы видео записали, что за подвес видно будет, как включаете, что делает, что не делает, сразу куча вопросов отпадёт и вам быстрее помогут 😃
самый бюджетный способ получить NT сенсор купить полетный контроллер CC3D и залить а него спец прошивку
А контроллер CC3D Atom Mini подойдёт на эту роль? И что туда шить?
Пока писал вы уж отредактировали … А для чего тогда два выносных если на плате есть еще один (третий)?
Если основная плата стоит сверху всей констркции (или в любом другом положении но за пределами моторов) то используется вторым тот датчик что на ней, а если вы основную плату крепите гдето по “середине” на одном из вращающихся рычагов, то второй проводной датчик выносится за пределы подвижних частей, крепится к ручкам и т. д.
А энкодеры, как я понял, к нашей версии платы неприменимы совсем 😦 надо другую 😃
- Два нижних мотора 5208
у меня такие, тянут вроде, но тут от качества моторов ещё зависит в моих такое чувство что китайцы пережали подшипники, разобрать неполучается, ось на что-то приклеили… а так и 6D ставил неспешно снимая работает 😃
- Верхний 6324 ru.aliexpress.com/item/FTBO-...999.269.vzXlWE
это мотор 5208, китайцы врут и пишут его внешние габариты, а не размеры статора
или лучше 6208 ru.aliexpress.com/item/iPowe...999.272.vzXlWE
вот тут всё честно, себе на замену заказал 6212 на яв, покажете потом что у вас выйдет 😃
В голове не укладывается как такое может быть если камера жестко прикреплена к этой пластине.
Да легко может быть, жёсткость же не 100%, а камерра самый энертный элемент ввиду массы, у самого таже проблема надо переносить датчик 😃
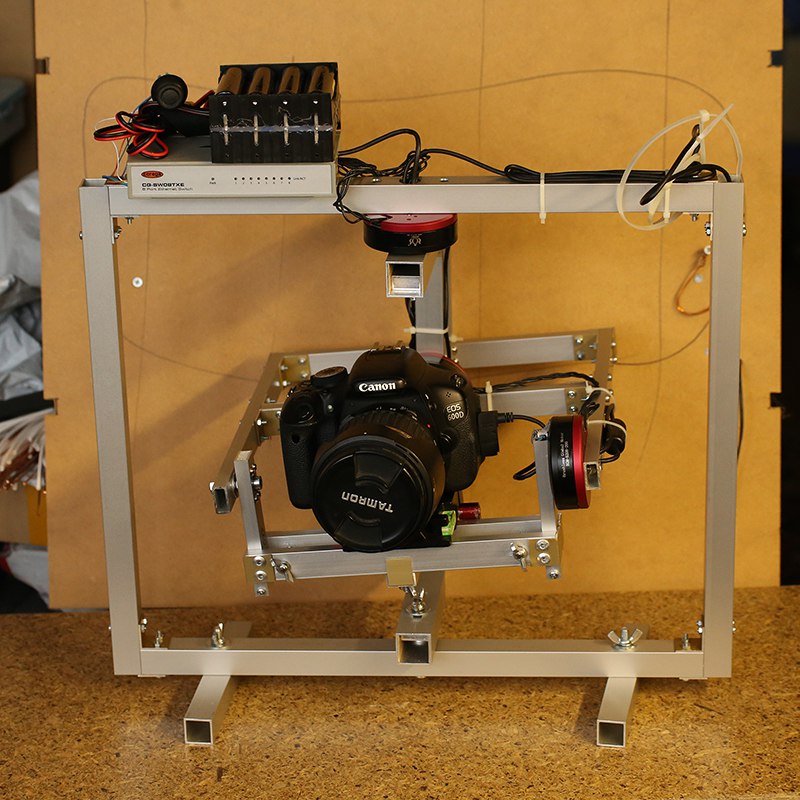
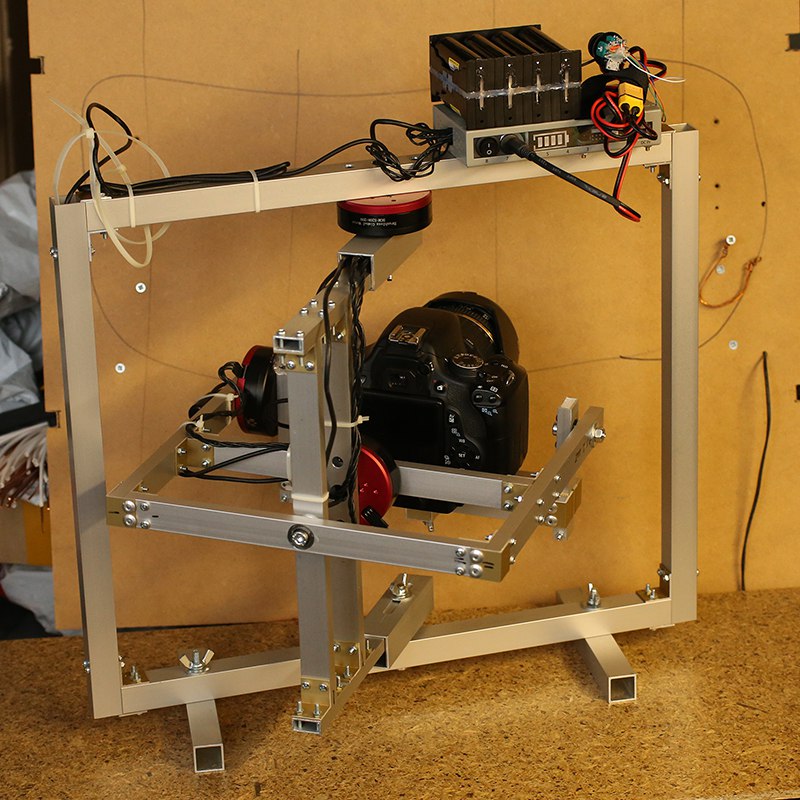
Вот тоже себе собрал под камеру поиграться 😃 Моторы 5208 (маловато по Yaw особенно), стабилизатор поставил на xl6019 выставил на 12в для питания контроллера, батарея из 18650 4S2P
Вот только вопрос есть: джойстик (потенциометры) подключеный на Pan входы отклоняет камеру с постоянной скоростью или скорость зависит от степени отклонения?
Только вот съемность лучей, а точнее их крепление не этими разъемами обеспечивается, разъемы луч не удержат…
Я и не предлагал их разъёмом крепить, тут просто как надёжное соединение двигатель - регулятор, а со съёмными ввиде муфт и прочего видел
Вот недавно наткнулся на такие разъёмы MT60
есть мысль вклеить их в алюминиевый квадратный профиль и тем самым получить съёмные лучи 😃 кто что думает по этому поводу? Может уже гдето было?
В моторах нет полевиков, проблемы полевиков это проблемы регулятора, мы же за моторы говорили…
А есть хоть какие-то цифры в попугаях? Субъективно, личное мнение, примерно в %. Просто если прирост ощутимый, то есть смысл мусолить тему, а если чисто теоретический в 2-3% то это так для поговорить только 😃
как подружить ручной пульт с приемником…
Поставьте сервопривод на кнопку это пожалуй самый простой способ 😃 иначе нужно копать и разбираться 😃
у мну была гекса диамтера 900мм на 17 пропах. куда вам столько?
Просто захотелось чего-то помасштабнее 😁 а размер набежал из диаметра пропов и необходимого расстояния между ними для подвеса 😃 может в перспективе камеру побольше подвешу… да и укоротить если что можно потом под 15"
акб 3p мало по токам.
по документации SAMSUNG INR18650-25Rдержит до 20А на банку, по моим подсчётам столько он есть не должен, разве что если нагрузить хорошо и тапку в пол 😎 или я где-то ошибаюсь? 😃
Добавлю ещё и свой “кирпич” 😒
диагональ 920мм по осям, пропеллеры 17", по центру снизу будет рейка с подвесом и АКБ литий 18650 5S3P 7500мА


Эхххх… походил я по нашим магазинам и нашёл только алюминиевую квадрат трубу 15х15х1,5мм вес луча выходит мрачный 100гр. 😦
Собственно вопрос как максимально облегчить его и при этом минимально потерять прочность? Если сверлить отверстия в двух плоскостях со сдвигом, то каким максимальным диаметром можно? 😉 8-10мм как думаете?
Чувствую явно рекордов не побью 😁 , но взлететь охота 😒
Вот такой вариант в процессе постройки:
покомпактнее, но думаю неудачное расположение подвеса

А вот в этом подвес конечно торчит снизу но зато меньше вероятность поймать винты в кадр при повороте (трёхосевой подвес)

я шился ,что интересует?
стабильность работы? есть что новое интересное? 😃
уже AT9 / AT9S Firmware Upgrade V1.5.1 (USB-) есть, кто-то ставил?
Нашел прошивку для minimosd, которая позволяет отправлять телеметрию!!!
а так чтоб через ардуинку сделать не попадалось случайно?
и как решать проблему ? выкинуть 3-ю ось нафиг ? или усиливать для нём мотор ? брать с большим моментом ?
а если как вариант временно отключить мотор и прификсировать ось, хоть бы и термоклеем, для эксперимента?
Что делать? И как лечится? Спасибо.
Попробуйте переместить папку программы в корень любого диска, возможно проблема в наличии кирилицы в пути к файлам 😃
Парни, расскажите или подскажите где почитать, на некоторых коптерах вижу моторы снизу лучей расположены какие плюсы и минусы такой конструкции? Для чего так делают? Оправдано ли это в нашем случае?
Приобрел At9s и квадрик на 450 раме с APM 2.8 на борту. Также купил модуль Prm-02, подключил его в приемник с одной стороны и в порт 12C в APM. И ничего не произошло… Лампочка зеленая на модуле горит непрерывно, а передатчик не отображает ни заряд батареи на квадрике, ни спутники, вообще ничего, что должен. Провода rx и tx менял местами, ничего не изменилось. В насройках аппаратуры и в MissionPlanere ничего не нашел по этому поводу. Подскажите пожалуйста что делаю не так, и куда копать.
Подобная ситуация, только аппаратура At9 и APM 2.6, тоже нет данных на пульте, только у меня после замены rx и tx диод хаотично мигает, но данных нет… вернул деньги за неё как нерабочую, теперь думаю делать вскрытие как время будет, может где непропай… кстати заметил при подключении иногда может приёмник “зависнуть” вобщем пропадает связь с пультом вообще, пробовал ещё на Пиксе и втором приёмнике R9DS результат тот же 😦
В полете же, под нагрузкой сильно занижает напряжение - где-то на 0.5В
а как вы его замеряли в полёте? 😃
В нашем случае, опорным напряжением для АЦП, является VDD, т.е. напряжение питания микросхемы мега2560 – 5 В, которым и соответствует код на выходе АЦП - 1111 1111, или в десятичном виде – 255. А напряжение VDD неизбежно «плавает», в зависимости от нагрузки, температурного дрейфа и кучи всяких других вещей. Соответственно, сводятся на нет, все «потуги» программиста придумать алгоритм перевода битов и байтов в удобоваримые вольты.
а подать внешнее опорное напряжение 5в возможности нет? например на AD584
То, что квадрик не изменит скорости набора/снижения высоты, пока я не “поймаю” “нейтраль”
Кому как конечно, но себе настроил в аппаратутуре два тумблера, один при переключении снижает чувствительность правого стика, второй снижает чувствительность ручки газа и делает кривую более пологой в центре, дальше в режиме удержания по GPSу бросил его примерно в центре и порядок…
А Сергей Павлович пишет что с пружинкой предпочтительнее. Короче печалька и грусть…
Если кто-то пишет что предпочтительнее, то логичнее спросить у него 😃 а что вам мешает отпустить неподпружиненый стик газа в любом нужном положении и делать чтото другое?
Настроить то можно всё что угодно, можно влепить пружинку, можно подогнать в аппаратуре настройку стика газа под висение вашего коптера, но зачем это надо? будет куча настройки и в итоге примерный результат, это ж не наза 😃