Activity
Я бы попробовал сделать следующее:
- Очистить EEPROM;
- Убедитесь что правильно выбран тип платы в конфиге;
- Заново прошейть плату.
- Поискать, что пишут в коментариях к Вашей плате на HK и rcgroup
Функции типа HORIZON должны быть отключены?
Плата какая?
MultiWii 328P
hobbyking.com/hobbyking/store/uh_viewItem.asp?idPr…
А вы кнопку Write нажимали?
Да. Каждый раз, когда увеличивал P
Нужно расходы в аппе увеличить multiwii.p.ht/page-20.html
В том-то и дело, что пульт без доп. настроек.
А за ссылку спасибо. Буду триммером до 1095 поднимать, если сктче не смогу поправить.
У меня еще вопрос. С пульта на приемник значение TROT приходит в диапазоне от 1000 до 1700 триммером можно поднять верхнюю планку до 1900, но тогда нижняя тоже лезет до 1200 и коптер уже не воспринимает комбинации включения отключения.
Может как-то можно настройках (прошивке) MultiWii выставить коэффициент для маштабирования значений приемника 1000-1700 -> 1000-2000 ?
Привет. Летаю на квадрокоптере и все работает без проблем, но аккумулятор когда высаживается только до 11 вольт, то коптер уже не может взлететь.
Я думал разряд должен быть где-то до 9 вольт. Может проблема в регуляторах HK 25 А перепрошитые отсюда github.com/sim-/tgy?
Вот уже готова плата для MultiWii на Atmega328
с дополнительным питанием 3,3В для датчиков
Если интересует, то схема и разведенная плата в архиве
shema.zip
Алексей, а чего в нашу тему MultiWii не идешь?
Уже изучаю
Сообщение от zaboy
Пока проблемы с управлением и посадкой, но трикоптер получился неубиваемый.
чуйку гириков на 20% снизить, из за этого и колбасит и переворачивает
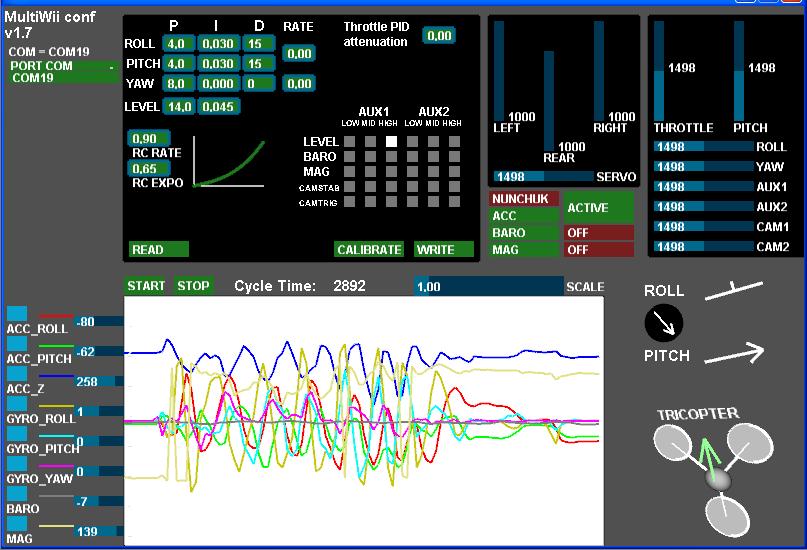
Это поля RATE поизменять нужно ?
Если интересно, то для трикопера на MultiWii набросал схему shema.zip
и плату
там питание для I2C 3.3 вольта и управление питанием от D12
Тренируюсь летать.
Пока проблемы с управлением и посадкой, но трикоптер получился неубиваемый.
Только после пятого падения сорвались заклепки с одного луча. Починка заняла 5 минут.
Вообщем нужен опыт.
Первый полет моего трикоптера.
Нужно потренироваться управлять этой штукой😁
А так, несмотря на сильный ветер и шаткую конструкцию, аппарат все же полетел!
Кто-нибудь знает, где почитать про алгоритмы иннерционной системы навигации? Махони скачал уже, но, может, еще есть?
Начните с ПИД-регуляторов. Мне очень помогло. Например - ru.wikipedia.org/wiki/ПИД-регулятор
Грустно, но красиво!
На импеллеры (как минимум на два противоположных) нужно сервы вешать для управления вращения меняя их наклоны, тогда все могут в оду сторону вращаться.
а в чем смысл использования импеллеров на коптере?
Ради эксперимента?
Наверное Габариты да и к падениям и столкновениям будет поустойчивее
Датчик ускорения промеряет 1g с которым земля на него влияет, с разными углами аппарата эти значения меняются и этот угол можно измерить как ASIN(от уровня сигнала) + шумы от вибраций двигателей. При быстром снижении датчик оказывается в “невесомости” и на выходе только шумы. И подстройка интеграла значений гироскопа нарушается. Нужно пытаться программно уменьшать степень действия датчика ускорения на гироскоп при снижении 😵.
I2C Немцы используют точно не для быстродействия, а для удобства и унификации. На одну шину повесл нужное количестово регуляторов с разными адресами и порядок. Для PPM нужны отдельные выходы с ШИМ лучше с 16-и битным аппаратным, можно программно, тогда сложнее и менее надежно.
По поводу быстродействия - в схеме версии 1.2 на выходах датчика ускорения LIS344 стоят кондеры по 0.1мкФ. По даташиту получается частота среза около 20 Герц. Гироскопы Murata ENC-03 по техническим параметрам со скоростью отклика 50 Герц т.е. уже на этапе измерений быстродействие не выше того же PPM. Поэтому неустойчивость аппарата в основном из-за математики и кривых разгона-торможения которые нужно отключать в стандарных регуляторах с PPM.
Спасибо, это все понятно. Поднять простую мыльницу проблем нет. Обычный коптер с этим справляется. А вот более серьезную технику… сами понимаете. Тут и мощность нужна и стабильность и надежность. Октакоптер необходим, но вот мощность, все-равно нужна большая. Для моих задач регуляторы-моторы от 500 ватт.
Про токи все очень просто, при максимальной мощности 500ватт/11.1В=45А или
500ватт/14.8В=34А для 3S или 4S LiPo. А можно и 6S тогда переделанный Hobbyking SS Series 60-70A ESC и KD 600XL 1100kv Brushless heli Outrunner / 1600W и вот вам 1.5 кВатт на двигатель.😒
контроллер на ATMEGA128, стандартные регуляторы 30А, двигатели CF2822, три оси с гироскопами, две с датчиком ускорения . При настройке лишился двух винтов после удара в потолок. Жду новых винтов, а пока и с запасным лететает 😒.
Фото
У ребят из uavp.ch/moin проект под стандартные регуляторы c PPM без I2C.
Ставь помощнее и будет работать, а инерционность компенсируется мощностью двигателей. Я как раз и пошел таким путём, хотя испытания покажут (есть мнение, что быстродействия PPM c его 50Гц недостаточно).
Всем привет!
Давно изучаю эту тему. На выходе свой вариант аппарата (своя схема и софт).
Подскажите, - зачем помимо гироскопов в схеме датчики ускорения? Я их использую для ориентирования относительно земли перед стартом, а дальше работают гироскопы. Если их использовать во время полета, то, как убрать шум измерения от вибрации ± 0,5g?
Спасибо за ссылку, я ее прочитал, тут же заказал изготовление трафарета из нержавеющей стали для нанесения паяльной пасты. Стоит 900 рублей. Но он же не на один раз, хотя и для одной платки. Нужно еще найти хорошую паяльную пасту.
Проще и дешевле можно здесь заказать www2.dealextreme.com:8080/details.dx/sku.6700
www2.dealextreme.com:8080/details.dx/sku.8674
Спасибо [ATLab] за подробное изучение и предложенные доработки очередного вырианта драйвера. На самом деле простое снижение сопротивлений R9,13,14 ведет к уменьшению времени отпирания-запирания полевика.
сейчас форум пока не пашет - вот архивчег - думаю zaboy против не будет…
он к стати говорил что там уже не обязательно IRLZ44 использовать
а можно любой полевик такойже структуры
главное чтоб расчитан был на ток не ниже 4а и не менее 50вольт
Не против 😃
И форум уже работает.
я уже приобрёл кучу полевиков и l297 так что надо их в дело пускать
Их нужно в паре с L298 включать, тогда будет то, что вам нужно
Rизм - 0.47 Ом.
Частоту ШИМ увеличил в 2 раза, теперь можно выставить токи двигателя на высоких оборотах (у меня до 4000 полушагов/мин при 30В питания). Нет ни писка, ни шума. Ничего не греется, кроме двигателей и Rизм и те градусов до 50 за полчаса.
Вот здесь мой вариант forum.wmtraker.com/viewforum.php?f=4
- еще импульсный Блок питания простой и мощный.
Все работает отлично. Проверено лично.
"
покажите Ваш станочек , можно в личку
Процесс сборки буду выкладывать здесь:
forum.wmtraker.com
Пока электроника
Позже - железо
"
покажите Ваш станочек , можно в личку
На картинке вот такой
"
Работает с любыми униполярниками. Подключал шаговики от сканера и Советские ДШИ 200 работают прекрасно.
На данный момент у меня ДШ200-2-2.
Из софта настроил MACH3.Изначально софт брал от пурелогика -
www.purelogic.ru/download.html
"покажите Ваш станочек , можно в личку
Пока еще нечего показывать. В процессе сборки.
С какими шаговиками и с каким софтом может работать ваш контроллер?😒
Работает с любыми униполярниками. Подключал шаговики от сканера и Советские ДШИ 200 работают прекрасно.
На данный момент у меня ДШ200-2-2.
Из софта настроил MACH3.
Изначально софт брал от пурелогика -
www.purelogic.ru/download.html
круто!!!
все - свой на выходных буду подключать !!!
Алексей
у меня есть бп- 12в 8а - пойдет ?можете выложить печатку и схему Вашего бп 30в и данные трансформаторов
за ранее спасибо…
Вот схема и плата в proteuse.
Дополнительная инфа
misterion.by.ru/other/polumost.shtm
круто!!!
все - свой на выходных буду подключать !!!
Алексей
у меня есть бп- 12в 8а - пойдет ?можете выложить печатку и схему Вашего бп 30в и данные трансформаторов
за ранее спасибо…
на 12в работать будет правда момент на больших оборотах никакой да и ШИМ плохо отрабатывает (слышны писк и шум в двигателях), не забывайте про 5в для работы логики контроллера. Схему приведу в божеский вид и выложу.
Вот ссылка на видео работы -
video.mail.ru/mail/wmtraker/1/2.html
И пару фото - Блок питания (30 Вольт/8 Ампер, 5 Вольт/1 ампер) и Контроллер с шаговиками
уффф
спасибо что указали на ошибку…
буду исправлять - от бы намутил…
Завтра выложу видео как все работает, правда только движки с контроллером, сам станок в процессе изготовления
😃
Огромное спосибо !!!на выходных бум пробовать подключить к компу
думаю с божьей помощью (в Вашем лице) все получиться !
еще раз спасибо !!!
у Вас ДШИ 200-2 используються ?
какой ток выставили ?
он ведь регулируется Р1/2/3 которые по 1кОм
у меня -
rcopen.com/forum/f110/topic111259
ток выставляю 1.5 А
P1/2/3 - 4К7
В вашем случае если оставлять P1/2/3, то нужно заменить R18/19/20 тоже на 1КОм❗
Алексей - извините за дотошность но я за то чтоб все было предельно ясно…
так и не разобрался что и как подключать к JP1/2/3
вот рисунки моего понимания подключения - если что не так пожалуйсто обязательно поправте
(один рис - паспортная схема дши200-2)
У меня вот так
доброе время суток !!!
на днях приступил к сборке своего станочка
знакомые сварщики соорудили станину и портал (см фотки)
вчера закончил плату контроллера
вопрос к zaboy (поскольку через личку отправить не могу сообщения - чтото с форумом)
все все - увидел файлы - огромное спасибо !!!😃
Алексей - у меня к Вам есть просьба
если не трудно , поскольку у Вас эта плата работает
можете по подробнее на рисунке указать как и куда подключать разьемы
(так сказать с 3й - 4й рельсы…😃)рисунки я выложил в форуме
rcopen.com/forum/f110/topic123311еще вопрос - на схеме указаны на каждый канал свое напряжение - т.е. отдельный источник питания - это обязательно или можно использовать один на всех - к примеру 24 вольта
еще раз спасибо за помощ:)😃
Питание у мения одно - 30 вольт от самодельного импульсного БП, только тяну отдельным проводом на каждый канал (последовательно не рекомендуется.)
еще Алексей ( zaboy )
скажите (а лучше покажите) пожалуйсто - какая распайка LPT провода ???
спасибо
если можете киньте мне на почту ( kret_a_v@mail.ru )
Стандартный кабель принтера LPT
Rизм - 0.47 Ом.
Частоту ШИМ увеличил в 2 раза, теперь можно выставить токи двигателя на высоких оборотах (у меня до 4000 полушагов/мин при 30В питания). Нет ни писка, ни шума. Ничего не греется, кроме двигателей и Rизм и те градусов до 50 за полчаса.
может у Вас есть файлы платы в Sprint-Layout ???
если поделитесь буду весьма признателен
У меня только в формате PROTEUS.