Activity
в прошивке онлайн правильно указан пин A02: SOFTSERIAL2 UART TX/RX
Возможно, что-то уже поправили в новых сборках. Я CTR давно не использовал, так, только для проверок каких-нибудь на столе… может то, что я выше писал уже не актуально. Просто у меня в записках сумасшедшего сохранено всякое разное, дабы не забыть… и там A02 это 1-й сериал.
CLI command
resource motor 5 none resource led_strip 1 A15 resource motor 6 none resource camera_control A08 resource serial_tx 11 A02 save
Я как-то победил CTR, все работало. Но прошивку скачивал с сайта. Если что, у меня валяется 4.0.0, если будет надо, скину.
Для Софтсериала не надо.
Softserial_TX1 is on TX4 pad & Softserial_TX2 is on TX2 pad if CPU based serial port is enabled since 2.0.1
Поменяй на 2-й софтсериал.
Такое чувство что сам полетник не видит приёмник
Похоже. Что-то на сайте про него столько варнингов… стремный он какой-то, конечно. Может и есть какой-то подвох, который они не указали. Другой полетник есть для проверки?
Только предупредить бы надо… Там упоротые в личку могут писать. Удалил этот канал.
Не знал. Мне никто не писал. Потому предупредить не могу)
При прошивке приемника галочка на Uart_inverted не стояла случаем? Model Match в луа скрипте глянуть еще, вдруг он там ON.
Вообще тут или прикладывать скрины всех настроек или идти в Телегу в группу “свидетели ELRS” и там проходиться поиском, постоянно такие вопросы всплывают.
А телеметрия с приемника на аппу идет? Связь-то есть?
Это Airmode такой эффект дает, вероятно.
Как-то уж очень помех много на видео, не?
Я модели бэкапил на всякий случай, но они никуда не делись.
Я недавно прошил для адекватной работы с ELRS.
Поменял а) inav_max_surface_altitude с 200 на 400 б) nav_max_terrain_follow_alt со 100 на 300 в) выключил режим nav_use_midthr_for_althold и установил значение nav_mc_hover_thr чуть повыше. Теперь он чуть подскакивает в режиме стабилизации, по идее это особо хорошо, но для проверки пока так.
В результате высоту стал держать выше, сантиметров 40 в помещении без яркого солнца над линолеумом. Позже попробую над иными покрытиями и над травой и проверю, какой из пунктов конкретно оказывает нужное влияние.
Добрый день. Подскажите, какую высоту должен держать дрон при использовании модуля 3901-L0X и возможно ли ее как-то задать или настроить. Сейчас он держит высоту не более 20 сантиметров, хорошо для газонокосилки, но не для коптера.
Интересно, спасибо, попробую.
Спасибо, услышал. Буду экспериментировать. Пока приклеил в раму. Говорят, это плохо, но стойка не дает большего расстояния от батарейки (она сверху), если только ее совсем на морде где-то крепить.


Еще вопросец, проверка качества калибровки компаса в поле как осуществляется? Подключаете ноут или на OSD можно что-то вывести?
с лионкой после калибровки в поле - тоже все хорошо
А до калибровки в поле влияние заметно? Смотрю в конфигураторе, так лионка на компас влияет практически на всех разумных расстояниях. Т.е. получается, что даже вынос на стойке не спасет. Ну или стойка будет слишком длинная…
Карбон ломается, алюминий гнется, нет в жизни счастья))
Если падать - алюминий дешевле. Если не падать… то карбон красивее. Ну и легче таки.
У меня после подключения к приложению слетел коэф-т батареи, но утверждать не буду, вполне возможно я и сам что-то случайно задел. Недостаток сенсорного экрана, пока тянешься к одному, можно случайно тыкнуть другое))
А старые версии это какие? С учетом скорости выхода, уж и не уследить…
У меня в POSHOLD держится только позиция, высота продолжает жить своей жизнью.
ну дык это автопосадка
Если оценивать качество, лучше заливать на Vimeo, а не Ютуб.
В обзорах любая свежевыпущенная камера - супер, остальные овно. Выход чего-то нового автоматически сдвигает прошлую в ряды овна, занимая место супер пупер камеры, маст хэв, все дела.
Отдельных фиксаторов никаких нет, просто фиксируются за счет конструктива. Не думаю, что ветер способен преодолеть усилие узла поворота.
В оригинале это выглядит так:

В поисках альтернативы комбинации стяжка+термоусадка для крепления антенн приемника натолкнулся на складные крепления от Walkera 210. Как запчасть продается под номером F210-Z-14, брал на Али. Не знаю, как будет в долгой эксплуатации, но один легкий краш пережили, падение с пары метров в траву, сложились и не сломались.
Мало ли кому будет интересно такое решение…



Какой у вас приёмник?
На сборке с Матеком CTR стоит x4rsb. В новых прошивках для CTR смарт порт идет через софт сериал. Его нужно в настройках активировать. И вроде он уже по умолчанию инвертированный понимает, во всяком случае я ничего для этих целей не делал.
Мои настройки:


А вот в старых прошивках нужно было инвертировать сигнал в CLI:

Urriy, спасибо. Вроде пофиксил проблему, чудил сам модуль GPS. Сейчас он ожил, но на всякий случай заказал другой, в запас.
Друзья, подскажите текущую распайку и настройку 405-CTR под INAV. Обновления выходят чаще, чем я успеваю взлететь… на днях хотел запустить, а фиг там… пищит и спутники не ловит. И хоть убей, не помню, взлетал ли уже после прошивки на 2.1 или нет… а тут уже и 2.2 вышла… стал разбираться, что куда должно быть припаяно и где какая галочка выбрана и голова кругом, на сайте Матека на картинках одно, текстом другое…
Выложите, пожалуйста, кто-нибудь свои настройки для этого полетника, а то пока я разберусь, уже 2.3 выпустят и опять что-то поломается)) Спасибо!
Мои текущие настройки:
GPS - TS100. Синий на RX5, белый на TX5.
TX4 - смарт порт приемника.
S5 - LED.

Со страницы прошивок Матека:
Softserial_TX1 is on TX4 pad & Softserial_TX2 is on TX2 pad if CPU based serial port is enabled since 2.0.1
Со страницы “INAV pins definition”:
S5 PA15 2812LED
Добрый день.
Подключил коптер к конфигуратору 2.1, 405-CTR. Конфигуратор сказал, что мол есть более свежая версия и предложил скачать. Но у меня пока времени не было, просто нужно было проверить направления вращения моторов на сменных лучах. Моторы настроил, отключил и по приезду в поле получил нежданчик… коптер спутники не видит от слова совсем и пищалка пикает как резаная. Вопрос, что с ним могло приключиться и связано ли это с тем, что конфигуратор увидел новую версию?
Да, тяжелее, безусловно. Собственно вместо них и хотел iPower использовать.
А как вы кстати поставили пропеллер 8 дюймов на мотор iPower?
По отверстиям все подошло?
Уж и не упомню. Скорее всего засверлил нужным диаметром да и все.
Еще были неплохи FPVModel 2208 1100KV
На 1200 у меня еще есть вот такие:

Но я на них только разок упал и еще ничего не готов сказать толком))
Если вы планируете использовать только с плоскими пропами
Да.
Увы, Crazy Motor и легче, и эффективнее, и мощнее.
Вот блин, у меня тоже были определенные надежды на iPower моторы, по качеству они мне больше понравились, чем Crazy. Хотел 8-ки с ними использовать. Будут в запасе если что тогда)

при моей любви к паденьям
может стоит подумать на предмет “неубиваемой” рамы? Пара профилей помощнее и ломаться будет только мелочь обвязки…
А мне понравилась мыльница, оч прикольная) Для Питерской погоды самое то)
стартовать пришлось из окопа
а сажать?
Судя по всему нужен не X8R, а D8R.
…а лучше выкинуть хаб и реализовать все на X8R и сенсорах с S PORT. Тем более, что Gas Suite его имеет.
для ДВС с сигналом от Холла
Если не ошибаюсь, то вот этот:
www.frsky-rc.com/product/gas-suite/
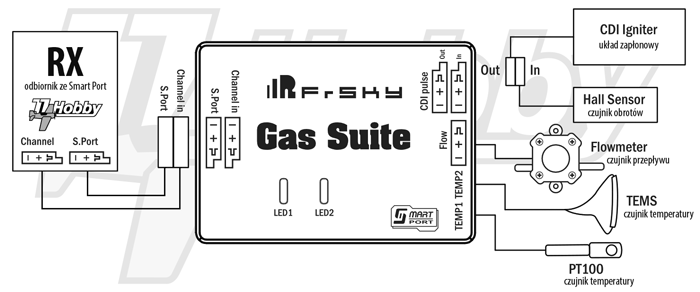
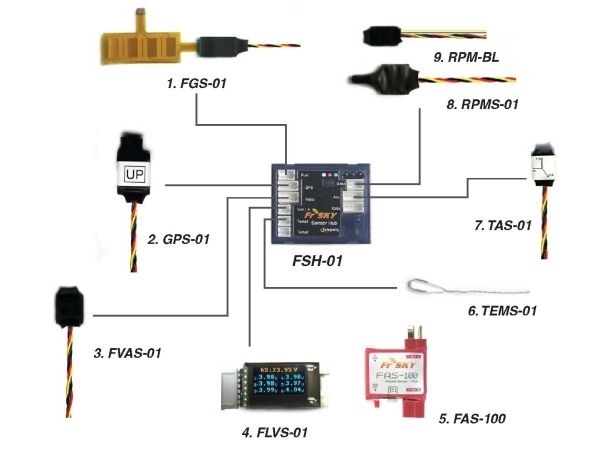
Frsky FSH-01
FrSky Sensor Hub FSH-01
Модуль собирает информацию с датчиков и передает в цифровом виде через последовательный порт приемника.
Датчики один ляд понадобятся. Только нужно смотреть, имеют ли они возможность последовательного подключения (и есть ли у них S PORT) и удобно ли это. А хаб собирает датчики по схеме “звезда”.
подлетнул вчера в комнате
На семнадцатых пропах в комнате? Ах, завидую вашей жилплощади)))
А конструкция крутая, да, сильно.
жду камеру для ночных полетов
Если не секрет, какую? В Питере такая очень актуальна))) Часто наблюдаю вечером, как летают в моих краях по вечерам, все интересовало, какие же у них камеры…
сейчас думаю над раскладкой антенной видеопередатчика
Вот всяческие антенны у меня пока белое пятно, куда и как ставить.