Activity
не стал я судьбу испытывать, зашунтировал оба светодиодных канала до 10 мА на габариты и 20 мА на оба передних (при “ближнем” свете 4 мА), заодно габариты стали индикаторами разряда ( гаснут при почти полном исчерпании аккумулятора 😉
серва на оси с самой маленькой качалкой и максимальными ходами очень даже без труда работает.
по сборке. детали из пакета A (мосты) по сравнению с остальными выполнены из разных пластиков. мосты довольно упругие, поверхность матовая, шаровые наконечники вкручиваются легким нажатием. остальные детали глянцевые, очень плотные, аж “звонкие”, шаровые без предварительной проходки саморезом просто выедают и выкрашивают пластик. по хорошему, тому, кто придумал вкручить металлическую резьбу в пластик, надо гвоздь в голову забить. ладно хоть сверлить ничего не пришлось и полуоси уже собранные были.
металические шестерни в мостах, конечно, гуд, но пришлось шайбами выбирать люфт в 3-4 десятки. подшипники в чашки осей загонял тисками, а из моста они выпадали, пришлось вклеивать. трапеция Аккермана с неразрезным мостом и “расчетным” положением заднего моста в трех сантиметрах от переднего выглядит, по меньшей мере, забавно. рулевые тяги невозможно сделать по размерам из мануала (лопаются пластиковые наконечники), а на завернутых по максимуму передние колёса даже визуально смотрят в разные стороны; пришлось отрезать пару мм на тягах.
p.s.
вообще, это был подарок на ДР второкласснику, но при сборке он “отсеялся” уже на этапе подготовки тяг. зато с готовой моделью теперь как курица с яйцом, половина квартиры вся в каких-то горках и препятствиях.
p.s.
ещё непонятка. выходы подсветки ограничены резюками в 75 и 180 Ом (передний свет и габариты), то есть примерно 66 и 27 мА. микроконтроллер, судя по мануалу, имеет нагрузочную способность всего 25 мА, а пара комплектых светодиодов в параллель жрут все 40 мА. для последовательно подключения не хватает напряжения.
стоит всё-таки использовать дополнительный шунтик или МК сдюжит?
отсканировал мануал от OH32A02, ссылка под картинкой:
может быть, владельцы первых двух моделей поделятся своими?
и вопросик. серву предлагается установить на оси либо на раме:
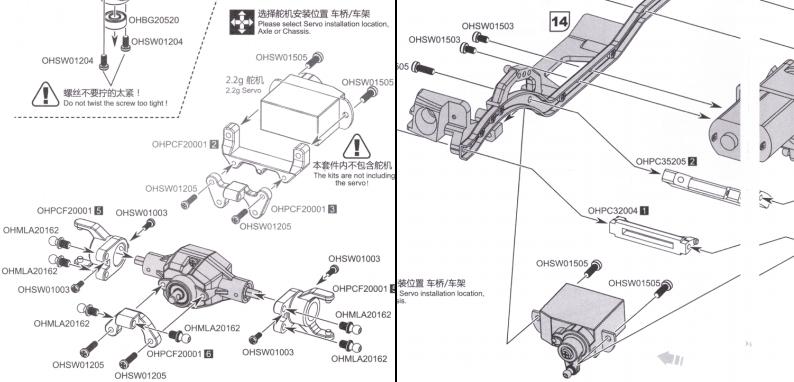
если на раме, то угол поворота ведь будет меняться при работе подвески?
схемы нет, софта нет. оно просто отдает сырые данные?
ну сделали там отдельные “реалтаймовые ядра” (в т.ч. тем самым подняли цену)), а есть ли для Линукса программная поддержка этого “блока” (??)
512 байт оперативки и 4 Кб для программы на один PRU, ассемблер с 40 RISC-командами, отсутствие умножения… какой линукс? это “помогайки” для реализации интерфейсов или DSP, не более.
это вам “пиратский” OrangeRX искать надо. или FrSky Delta 8, который “Compatible with FrSky D8/V8, Futaba S‐FHSS/FHSS and Hitec AFHSS systems”.
в мануале на этот ВЧ-модуль не указано с чем он совместим?
2.1 Transmitter modules
2.1.1 Model: DFT
Compatible with the following transmitters:
Futaba: 3PM, 3PK, 7U, 8U, 8J, 9C, 9Z, 10C, FN series, T10C, FC-18, FC-28.
Hitec: Optic 6, Eclipse 7, Prism 7.
WFLY: WFT09, WFT08.
2.1.2 Model: DJT
Compatible with the following transmitters:
JR: 347/388/783/U8/PCM10/PCM10S/PCM10SX/PCM10IIS/8103/J9303/ PX/9XII.
2.1.3 Model: DHT
Installable in almost any PPM modulation transmitter
2.2 Receiver modules
2.2.1 Model: D8R (V2)/D6FR/D4FR
Compatible with FrSky Two Way modules DFT/DJT/DHT/DHT-U
2.2.2 Model: V8FR-HV, V8R7-HV, V8R7-SP, V8R4
These receivers are one-way only but operate with transmitters that are switched to one-way mode.
любая нестабильность по питанию сильно отражается на надёжности работы малины.
это единственная причина, все остальное вами перечисленное — следствие.
плюс (по опыту съемки малины с камерой) почти любая Pi (кроме Zero, ее не пробовал) очень сильно не дружит с наводками от моторов/передатчиков, в идеале нужно независимое питание от отдельного аккумулятора.
пока не прописаны конкретные кары — никто никуда не побежит.
не уверен, что продавец фантика побежит за меня подавать на регистрацию…
так продавцу и не нужно их регистрировать, на нем остается бесплатная постановка на учет. но, наличие этой постановки не перечислено в требуемых документах для регистрации.
пока что выходит что:
постановка на учет — изготовитель/продавец, документы подаются в ФСБ, бесплатно.
первичная регистрация — владелец, документы подаются в ФАВТ, 5000 руб. (подходит только это)
при изменении модификации / собственника — владелец, туда же, 350 руб.
списание / снятие с учета — то же, 2500 руб.
если регистрация действительно обойдется в пять штук, то я несколько изменю свое не самое отрицательное мнение по поводу этих поправок.
текст появился сегодня,
то что вы процитировали (Учет_БЛА.rtf) как минимум 2 дня висит без изменений. или текст из еще какой-то “неполной” версии?
я вообще не верю, что те комментарии хоть что-то значат для разработчиков подзаконных актов: скорее всего им глубоко плевать, они работают только от принятого закона и сами себе на уме.
“Ведомство обязано рассмотреть все предложения, поступившие в срок проведения общественного обсуждения, и отразить результаты в сводке предложений, которая размещается на портале при завершении соответствующего этапа.”
для других проектов такие сводки имеются.
лучше, чтобы фсб в эти дела вообще нос не совало.
если вдруг куда-то упадет ядрена бомба/распылят что-нить ядовитое, то у фсб будет информация о всех доступных коптерах, которые можно будет задействовать для съемки/взятия проб. сейчас у них есть аналогичная инфа про владельцев грузовиков, к примеру, на которых можно эвакуировать население (или вывозить шубы со своих дач, если так больше нравится). владельцы катеров, личных вертолетов, также посчитаны, как и всякие личности с боевым опытом.
поверьте, в первую очередь это делается не для спускания бумаг. как в итоге все реализуется — это другой вопрос.
Я или продавец, как лицо первично его ввозившее в РФ?
по всему получается, что на учет должны ставить “граждане и компании, которые производят или импортируют”, а регистрировать — конечный владелец (пользователь).
Не понятно зачем два одинаковых проекта
они не одинаковые, они дополняют друг друга, для учета требуется регистрация.
К обоим текстам одинаковые вопросы:
это стандартный “шаблон” для любого законопроекта.
идем на сайт и вносим свои, самые правильные на свете предложения, не бузим.
а я давно внес. в плане увеличения минимальной массы до 5 кг и определения “производителя” ЛА. все остальное, как-то: проблемы развития моделизма у детей; трудности с продажей; разграничение между хоббийным/профессиональным и тд — к поправкам об учете не имеет отношения, а значит будет сразу отметено.
Уверен, что ни кто не считал, сколько потратит государство на регистрацию детского самолета-игрушки весом 300-500 грамм…
это окажет абсолютно ненужную нагрузку на гос. органы.
не больше, чем заложено в стоимость пошлины. тем более что от количества выданных регистраций зарплата работника госструктур не зависит, а сроки оформления/выдачи прописаны (как обычно) с тройным запасом.
>Даже в США, где теперь требуется регистрация беспилотных летательных аппаратов, рассматривается вопрос
ссылаться на вероятные действия при обращении в госструктуры бесполезно. тем более на США.
>свидетельство о регистрации должно просто распечатываться с сайта, а не присылаться почтой или выдаваться при личном посещении.
для этого нужно обеспечить доступ к базе регистраций любого, кто будет обязан контролировать сей процесс. за ваш счет, а не за дядин. потом, много тут кто рискует ездить с электронным страховым полисом без его бумажной копии? доступ к базе уже должен быть у каждого гиббдшника, но не все из них об этом еще знают.
>До сегодняшнего дня ни кто предполагать не мог…
опять же, личные проблемы мало кого волнуют. ни одна подобная жалоба во время обсуждения введения того же ОСАГО не прошла.
>2. Регистрация не каждого маленького аппарата, а владельца аппарата(ов).
нельзя требовать регистрации владельца когда поправки направлены на регистрацию именно аппаратов. для вашего предложения нужно отменять сами поправки, а не изменять их.
никаких фантазий, все читаю из поправок
могут != обязаны. даже в зоне G разрешение на полет не требуется, но вот составлять план — это, наверное, лучше у pilot222 уточнить с его дельтапланом.
с выдачей владельцу наклейки с рег. Номером.
для этого потребуется создание еще одного отдела по всей стране, а то и целой организации, дополнительные штаты и тд. то есть дополнительные расходы, которые в текущем проекте не предусмотрены. вот где у нас уже регистрируют что-то с выдачей защищенной от подделывания наклейки?
просит документы и план полета
а откуда вообще взялся план полета? это из Воздушного Кодекса применительно к МЛА?
один неадекватный коллега на фоне всего городского коллектива моделистов отчибучит такое, что пятно ляжет потом на всех
сейчас полно неадекватов среди владельцев оружия и автомобилей. никаких пятен на остальных вроде как не наблюдается.
госпошлина сюда, госпошлина туда
откуда вы взяли несколько пошлин за одно действие?
упс, приехали)
Документ оторван от реалий простого авиамоделиста.
на радиостанцию самостоятельной постройки также требуется подтверждение о том, что именно вы ее собрали, но никто не плачется. если у кого-то стырят велосипед самостоятельной постройки, то заявление о краже не примут без доказательства “права владения”.
Какие могут быть документы у тех же авиамоделистов, с нуля собирающие свои модели? Все комплектующие покупаются в обычных магазинах или изготавливаются самостоятельно.
если покупаются, то остаются чеки. а если изготавливаются, то специально ради такого случая в вышеприведенном “Порядке регистрации” недавно добавилось уточнение о производителе: “наименование изготовителя (фамилия, имя, отчество изготовителя воздушного судна самостоятельной постройки);”
каждый раз оплачивать пошлину и перерегистрировать заново (как того требует данный текст регулирования) - нереально.
авиамоделисты каждый день делают из самолета вертолет, меняют число двигателей или взлетную массу?
Данное регулирование сделает невозможным регистрацию любительских авиамоделей
даже в текущем виде нет никаких препятствий к регистрации хоть бумажного самолета с резиномотором.
Значит цель чиновников частично защитить свою дачу от съёмки сверху
которые приехали из Китая чтобы снимать их дачи
вот вроде адекватные люди собрались… чтобы защитить дачи достаточно запретить (вписать_чего_угодно). текущие изменения направлены далеко в сторону от избавления от чересчур любопытных.
Если бы создать федерацию и в ней регистрироваться, то опыт показывает что денежки туда придется платить столько, сколько нам неохота
беглое гугление уже выдает как минимум десяток федераций, организаций, клубов и обществ по защите прав авиамоделистов. ессно, с членскими взносами за… вот за что именно я пока не понял.
малая их часть пошла бы на развитие типа проведения мероприятий
вы слово “малая” перепутали с “никакая”. с чего бы это всяким федерациям отдавать ваши деньги мимо своего кармана?
на футабе управление мягкое,четкое, а вот на турниджиувствуется какая то миллизадержка или неточность управления
мягкое и четкое вообще-то сложно сочетаются. да и остальное из той области, где любое заявление очень легко подтверждается либо опровергается измерениями. двухканальный осциллограф (сигнал со стика/резистора + сигнал с приемника) — и все задержки и неточности как на ладони.
протереть тряпочкой с графитом от грифеля карандаша для лучшего скольжения
графит прекрасный проводник, вместе со скольжением изменится и сопротивление.
многие производители сильно заморочились над фактом присутствия такой функции как Follow Me и достигли успехов
я добавил бы еще “и за более вменяемые суммы”. ONAGOfly, 200 уе за предзаказ и сотня сверху после начала официальных продаж.
Регистрацией беспилотников в России займется ФСБ
а что такого страшного? повторюсь, ФСБ, как и почти любое другое госучреждение, представлено на сайте госуслуг. повесят на них — появится новая строчка, делов-то.
если аппарат кастомный, как в моём случае - то как быть?
“В случае изготовления БПВС прилагаются документы, подтверждающие изготовление БПВС, подписанные его изготовителем.”
по аналогии с регистрацией самодельных (не фирменных/заводских) радиостанций, указание изготовителя всего лишь еще одно звено в поиске крайнего, случись чего. если вы кому-нибудь проломите голову своим аппаратом, то в случае с “фирменной” моделью можете попенять на изготовителя, а с самоделкой — только на себя.
p.s.
а есть тут владельцы “малой авиации”? изменения ведь вносятся в Воздушный Кодекс РФ, а народ без особых проблем летает на дельтапланах с моторами от газонокосилов (образно), которые также нужно ставить на учет.
Однако у Александра (AlexandrCNH) все же вышло
в начале цитаты было “прошивка 808r (важно), заходим в меню LIMITS”. но в этом меню отображаются не RAW-значения, смотреть надо было в меню калибровки.
не, стиками я очень даже доволен, критикую только резисторы. а то что большинству понравилось — так я всегда говорил, что все что больше 10 бит в передатчиках — маркетинг и самовнушение ;)
p.s.
но самопальный “растягиватель диапазона” на ОУ все-таки поставил.
Если в самом стике, то есть мнение, что замена на таранисовские может вполне помочь.
замена приведет к уменьшению и без того не самого высокого разрешения на ~30%.
всё критичное выполняется в обработчиках, а в “задачах” самые некритичные действия.
ну я и говорю, очень необычный стиль.
вся обработка в прерывании, а надо чтоб в прерывании обновился датчик, после чего обработка прерывания завершается, управление предается планировщику, планировщик запускает вычисления.
если вычисления полностью зависят от обновления датчика, то накой нужен планировщик? это линейная задача, практически атомарная, а вы ее зачем-то бьете на части. подозреваю, что с остальными “более 20 обработками” происходит так же.
обработчики событий (сопрограммы в терминах фриртос)… использовать сопрограммы как я хочу нельзя.
в терминах freertos сопрограммы — подпрограмма с множеством точек выхода -> продолжения выполнения. в них пихают либо самые ненужные, либо самые простейшие действия, на которые действительно жалко тратить память. если обработчики событий попадают под это определение, то у вас очень необычный стиль программирования.
у меня задачи и обработки будут статическими в виде глобальных структур. Что это дает? Нет сложного механизма списков и выделения памяти.
а контролировать и гарантировать атомарность будете ручками? одна задача начнет запись в вашу глобальную структуру, планировщик запустит вторую задачу на чтение этой структуры, не до конца обновленной. собираетесь в конце каждой вешать флаг готово/не готово? не факт, что ваш велосипед не превысит сложность имеющихся и “незаметных” инструментов.
кстати, что сложного в однократном выделении памяти при создании задачи?
Оно мне надо?
по моему, все ваши требования укладываются в
while(1) {
task1();
task2();
...
taskN();
}
со вставкой в начало каждой задачи простейшего диспетчера отслеживающего количество тиков.
это точно относится к px4 реализованном на stm32?
NuttX всей этой лабудой заниматься умеет, и довольно на большом разнообразии железа…
о, напомнили. вот весьма красноречивая картинка от px4, кто где живет в рилтайме, а кто как придется:

Я просто не знаю ни одной системы (доступной любителям) с таким функционалом
можно еще уточнить, “ни одной системы, не являющейся копипастой другой системы”. и добавить “с подготовленной теоретической базой”.
вот вспоминается небезызвестный дядя Madgwick, у которого реализация алгоритма в коде занимала одну страницу, а остальные тридцать — сплошь формулы. (эти 30 страниц, ессно, никто не читал, код разошелся, а банальную опечатку в реализации разложении градиента заметили чуть-ли не через год).
Тогда зачем на борту нужен линукс?
ну, как для Parrot-а, к примеру, разместить на борту ground station, которая и занимается навигацией. а самой станцией рулить мобилкой.
Интересно, до какой высоты он сможет компенсировать уплывание?
до такой высоты новички (на которых расчитан девайс) обычно не долетают.
> у меня это так, ибо хобби +мозги не закисают
у меня к этому никаких предубеждений нет.
создание надежного алго ИНС+АП УНИВЕРСАЛЬНОГО, не только на многоротор, и не только на самоль, а на всё подряд (в т.ч. на гибриды), причем чтоб прошивки не менять, просто изменить параметры руления.
то есть повторение уже имеющихся наработок/разработок/продуктов. если это для все той же мозговой разминки, то тут вопросов быть не может, но может быть есть какая-то иная цель?
вижу так: Прерывание-> событие в ядре -> вызов пользовательских задач
замените значок -> словосочетанием “неизвестный временной интервал” и вы поймете суть претензий Олега 😉
Снятие данных с датчиков и обсчет ИНС должны выполняться с максимальным приоритетом.
поэтому никто и не делает их “пользовательскими”. а по большому счету ИНС должна физически быть отделена от всего остального и отсылать только готовый результат, от которого не требуется килогерцовых обновлений.
/dev/mem, /dev/port , /proc/interrupt, /proc/irq/* — это и много чего еще есть уже существующие прямые “каналы” связи, точнее сказать, интерфейсы. начиная с 2.6 можно переконфигурировать ядро для поддержки полной вытесняемости и повысить всем своим нужным процессам приоритет до максимума. тогда юзерская задача получит доступ к чему угодно (практически) когда ей угодно, вплоть до игнора системных задач.
но я все равно не понимаю, для чего нужно пользовательским свистелкам иметь самый прямой доступ к железу, так никто не делает. нет задач пользовательского контекста, которым нужно строго детерминированный доступ к ресурсам. простейшие примеры: подушка безопасности, ABS, ESP — прикиньте что случится, если туда же запихнуть медиасистему с навигатором, которому вдруг потребуется всех выкинуть и занять время на опрос датчиков вращения колес.
под каким углом запустишь - так и будет держать
запустишь по горизонту — будет помнить этот горизонт и приводится к нему из любого положения. но да, он читерит маленько если использовать мышиный сенсор (с разрешением 8*8, вроде) и “поправляет” этот горизонт при опущенных стиках и висении. и это без акселей, гпс, барометров, компасов и пр.
просто и надёжно без всяких интеграторов…
дык если сложно и до сих пор не получается, то может пора вернуться к чему-то более простому? серьезно, пять лет назад этот топик начинался так “есть мысли по созданию собственного УНИВЕРСАЛЬНОГО контроллера для многомоторных систем”. что сейчас в наличии кроме процесса ради самого процесса?
Ща выбросим все свои проекты, назы, фишки, арду.
назы, фишки, арду — не ваши. а то что не работает — да, нужно выбрасывать. освободившееся время потратить на теорию “Linux и прерывания в userspace”, например.
щёточные мелкокоптеры устойчиво летают под ручным управлением я отлично знаю
а нужно чтоб пиво с кухни возили?
допускается работа прерываний (аппаратных или программных) с приоритетом выше чем у шедуллера самого ядра
то есть все, что работает в ядре и после него не может обрабатывать эти прерывания. а значит, никаких пользовательских задач с рилтаймовыми возможностями, то есть фактически аналог RTLinux. все что остается — низкоуровневый код, которому до пользователя очень далеко.
поэтому “Принципиальных противоречий совмещения того и другого” целый вагон.
линукс изначально заточен - не пускать юзеровское пространство в обход шедуллера)… Не так ли ??
не так.
> в частности “чудесный” механизм маппирования
не вижу причин для сарказма. через WMI или сокеты организовывать межпроцессорное взаимодействие типа круче?
> ядро, опять же, предоставляет этот доступ когда ЕМУ угодно, а не когда угодно приложению в пользовательском пространстве
а с какого что-то из userspace должно иметь приоритет? его участь — сидеть тихонько в уголке и ждать очереди.
вы пытаетесь совместить несовместимое, “ах, хорошо бы иметь интерпретатор в жесткой рилтаймовой ОС…”. при этом вспоминаете про OS/2:
у нее под каждый запущенный процесс была возможность гибко выставлять приоритеты и кучу других системных настроек, распределением нагрузки на процессор можно было управлять прям из GUI…
в любой *nix системе все то же самое можно делать даже из консоли и даже удаленно. любую *nix систему можно запустить под RTOS как обычную задачу с любым приоритетом. если хотите превратить RTOS в багованное нечто, то сделайте любой интерпретатор ее задачей.
а что в них такого важного? все уже давно придумано, реализовано и скопипащено тысячи раз. у меня Flymentor (на одних аналоговых гироскопах) начинает заваливать горизонт только через 2-3 минуты непрекращающейся “колбасни”. (уже) ширпотребный Parrot мобилками управляется и проблем не знает. китайцы продают игрушки по 20 уе, которые с успехом держат что угодно на любых ускорениях и висят на месте как вкопанные.
а тут (не конкретно тут, а образно) все что-то свое придумывают, для чего не хватает 9DOF+барометры+GPS+камеры 😉
да ёпрст… “событие” на цифровом входе — изменение его уровня. “прерывание” — вызов callback-функции по наступлению события (счетчик) либо по условию (уровень == 0/1). а как еще узнать про изменение кроме как прочитать ячейку памяти (“значение на ножке”)??
в общем, не надо больше про “Linux не пускает к железу напрямую”. в Linux любое устройство есть файл с блочным или символьным доступом, которое, по желанию/требованию mmap-ится в память без каких-либо трудностей.
а что, интересно, продемонстрировано в последней строке моего примера на баше?
могу рассказать, только для чего? чтобы еще раз повторить довольно известный факт об отсутствии в Linux каких либо ограничений на доступ к железу?
а такты считать при использовании “языков высокого уровня” вообще-то не принято. не для этого они созданы.
пример на bash:
# Set up GPIO 4 and set to output
echo "4" > /sys/class/gpio/export
echo "out" > /sys/class/gpio/gpio4/direction
# Set up GPIO 7 and set to input
echo "7" > /sys/class/gpio/export
echo "in" > /sys/class/gpio/gpio7/direction
# Write output
echo "1" > /sys/class/gpio/gpio4/value
# Read from input
cat /sys/class/gpio/gpio7/value
ОС не пускает к железу напрямую
вы сейчас о чем, прямой доступ к /dev/* за железо уже не считается?
есть куча задач, в которых можно наплевать на объем и быстродействие. кнопочная логика управления, UI для OSD, форматирование телеметрии, навигация. вместо перекомпиляции/перепрошивки создал (изменил) скрипт на внешней карточке и пользуйся.
а с быстродействием пусть RTOS разбирается, она для этого и создана.
А хочется - типа линукса
линукс — это ОС, а не интерпретатор. скрипты же можно хранить хоть в облаке и загружать их по мере необходимости.
у турниги нет микшеров, есть миксы
вы серьезно считаете, что от неправильного перевода жаргонов в мануале (по вашей ссылке перевод какого-то француза через гугльтранслейт из источника на неизвестном языке) какой-либо аппаратуре изменяются ее возможности?
запросто, используюя конечные точки end point…
то есть болтаться по разным менюхам вместо того, чтобы просто использовать свободные микшеры. и это является простым и логичным?
[off]для меня до сих пор непонятно, почему чем “профессиональнее” и дороже аппаратура, тем больше в нее напихано готовых предустановок для всяких летательных аппаратов, вплоть до раздельных вертолетных и самолетных аппаратур. разве “профессионал” не должен самостоятельно настраивать свою модель, не полагаясь на конфиги каких-то непонятных человеков??
упомянутая er9x в процессе развития когда-то называлась неподходящей для вертолетов, ибо даже готового микшера для 120° тарелки в ней не было. а вручную “нарисовать” схему управления из десятка микшеров и трех промежуточных каналов тоже было чем-то нереальным, хотя позже появившийся мастер настройки делал ровно то же самое…[/off]
не есть ли наши “любимые” потенциометры?
они не влезут.