Activity
Напряжения - просто. Судя по документации (www.mateksys.com/?portfolio=f722-std) на Vcc вход подаётся напряжение батареи. Если вход не сожгли - подать с батареи и будет показывать.
По питанию видеопередатчика\камеры - смотрите на какое напряжения они рассчитаны.
Лучше заменить на плате стаб, там LDO, совсем недорогой.
Лениво самому, в мастерской сотовых рублей за 500 поменяют.
Напрямую с батареи на vbatt? Я думал об этом. Мне просто стремновато. Боюсь по току не пожгется?
На регуляторе 4 в 1 коротнуло Vbatt и Vcc.
Соответственно напряжение теперь не показывает на осд и питание видеопередатчика идущее с контроллера тоже не работает.
Ставить плату разводки питание - место не позволяет. Контроллер 722STD(без площадок подключения батареи)
Возможны ли пути решения с отображением напряжения и питания видео?
можно ли напрямую от батареи кинуть плюс на питание видеопередатчика не спалив его? ну и собственнно на Vbatt?
Привет народ.
собственно вопрос, кто подскажет…
После падения у данного девайса работают только пины - 1 2 3 4 5v GND
Остальные два Сurr и Vbat дают короткое на землю.
Для полета сойдет но ни напряжение посмотреть ни ток для остатка ёмкости не проконтролировать. МОжет кто подсказать на какие элементы смотреть для ремонта?
Привет народ. Помогите разобраться. У меня регулятор Хообивинг 4 в 1 и Матек 722СТД. При подключенных выводах Curr на контроллере и регуле не изменяется значение потребляемого тока. Пару раз было что в процессе полета начинал считать ток и остаток ём кости, но как это получилось не знаю. Всё откалибровал через ваттметр. Множитель поставил в соответствии с требованиями производителя к данному типу контроллера. Весь полет стоит цифра 0.35 и всё.
Имею матек ф405 ЦТР и видеопередатчик vtx5848 lite
имею с этим железом следующую картинку:vk.com/video-73909783_456239508?list=f46342d238544…
Это всё происходит на морозе. Через какое то время(1-2) мин картинка становится стабильной. Поставил мощность побольше, что бы прогрев шёл быстрее.
Можно чё сделать с этим?
Сейчас модно в PID Analyzer настраивать пиды.
Пробовал. С моим P я до него просто не добрался. ))))
Вы крутите неактивный профиль, его в OSD можно поменять.
Да с профилями был косяк. НО
В итоге добился я осциляция на P=130
ну а потом D=34 и I=28
Странно конечно но летает.
Мож кто подскажет с чем может быть связано- принастройке пидов при выставлении всех кроме yaw в ноль начинаю крутить p с 30(ниже не держится просто). Так вот до 120 догонял P - никаких осцилляций не происходило. Следом в таком же плане D тоже за сотню и пофиг. Как будто где то дефолтные в загашнике стоят и он с них летает. Кстати когда опускаю и развожу стики что бы сохранить настройки- он их сбрасывает на дефолт почему то.
Может можно как то стереть прошивку и накатит заново?
Вопрос такой. Как узнать пределы начальные/конечные в параметрах ПИДов. Дело в том что при вводе в ручную какой нибудь заоблачной цифры при нажатии на Энтер значение выставляется “как бы в максимально допустимое значение”. Ок. Но при настройке коптера в автотюне я увидел значения в ПИДах которые мне самому не разрешалось туда забивать. К примеру в Rate Pitch АПМ себе поставил значение 0.336, когда мне больше 0.200 не давал вводить.
Всё это к чему. В автотюне настроился он и мне даже эти настройки нравятся, но при смене режима полета или смене направления полета происходит дёрганье какое то.
Меня непонели. Есть ли на этой модели вункция “servo slow speed” которая замедляет скорость движения сервы по зададанным значениям.
Это я отвечал на ответ на моё предыдущее сообщение.
По поводу вашего вопроса - если не ошибаюсь Это раздел Экспоненты(Expo/Dr). - Ставится на каждый канал.
Добрый день!
Была похожая проблема со стиком на Турниге 9хрПро.
Движение стика влево также приводило к смещению вниз, хотя физически движение вниз отсутствовало. Проверка переменных резисторов показала их полную исправность. Решилось переукладкой жгута проводов от этих резисторов по другому краю пульта. Проблема оказалась во взаимной электронаводке
Незнаю экранирование помочь должно или нет, но я фольгой экранировал все пучки проводов в той части аппаратуры- НЕ ПОМОГЛО… (((
Привет. Помогите разобраться…
Как получил новую сразу же заметил, что уводит показания стика по крену. По началу потихоньку уплывал ноль при работе стиком, сейчас просто после выключения/включения сразу на 5 единиц. Калибровка и сразу же скачёк и отсутствие нуля. Вначале было не очень ощутимо. Задавал вопрос - рекомендовано было заменить стик или вскрыть и “подшаманить”(не помню уже , но что то делал). Короче вскрытие - вскрытием, а с продавцом договорился что он мне весь новый стик в сборе блоком пришлёт. Прислал. Поменял - ничего не изменилось. Получается дело не в механической части…
Грешил на ПО. Залил прошику ER Sky 9X (для FrSky - у меня стоит модуль DFT). После каждого вкл/выкл показалния прыгают а 4-5 единиц. После калибровки тоже уходят. Подскажите куда копать…
Вышел в поле, настроив предварительно крутилку и 3х позиционный переключатель для настройки ПИДов. Взлетаю, начинаю увеличивать Р. Ничего не меняется. Сажусь, запоминаю, смотрю по компьютеру - Р в районе 160. Можно как я понимаю продолжать дальше… D и I в том же порядке. Так и должно быть? И коптер при этом вяленький. Настраивал в стабе. В акро пока моторики нет.
всё не так.
арм - включение моторов.
англе - стабилизация автоматом
баро - удержание высоты по барометру (если есть)
горизонт - стабилизация, но позволяет делать флипы.акро - это когда ни один режим со стабилизацией не активирован (кроме арма)
можно совмещать некоторые режимы.
Думаю по режимам видео на ютубе достаточно, как и информации на форуме.
Ну так получается арм без других режимов автоматом-арм?
В последней версии бетафлай остались из всех режимов :Arm,angle,baro,horizont.
Поправьте если я не то что говорю. Арм-это арминг. Он же не есть стаб режим?
Angle это акро(то есть максимально шустрый и чувствительный). Horizont-просто добавляет к акро флипы на крайних положениях стиков. Баро это дополнение к стабилизационному режиму для удержания высоты? А где стаб режим?
Или я что путаю. Других режимов больше нет.
Извиняйте, разобрался. Вверх ногами плату паял и всё в зеркальном отражении припаял. На место одного из моторов приёмник, а вместо приёмника мотор.))) Ещё удивлялся - что все моторы кроме одного работают.
Ничего нигде не надо переключать/паять/выпаивать. Просто воткнул приёмыш и всё заработало как надо. Ну да, соответственно заранее надо аппу забиндить.
Ну не нашёл я ответа…
Взял frsky d4r-ii. Как я понял он работает в PPM режиме. потомку как в передатчике модуль DFT. Для этого перемкнул как в инструкции 3и4 пины. А сигнал с питанием подаю на 1й. Соответственно на контроллере припаялся к ППМ/СБУС разъему. Перемычки какой либо на плате для активации PPM не нашёл.
При подаче питания на контроллер - приёмник не работает. В бетафлай по порядку все порты UART включал. НИЧЕго. Кто подскажет куда копать?
- здесь такая же проблема, советуют подключать пищалку не через разъем, а припаивать.
А ты погляди внимательно видео - куда советуют припаивать. Как я понял с другой стороны платы от разъёма питания присутствуют два места - вот к ним. У Юлиана очень понятно разъясняет…
Подскажите такой момент:
- при подключении через БЕК - плата молчит. При подключении USB - заводится. Вместе пока не включал(поэтому порты пожечь пока не мог). Только раздельное питание подавал. Хотя кондёр на вход припаял сразу.
Это плата мёртвая или я что то ещё не сделал?
А может такое быть - ничего не подключал - только спаял всё. Кондёр поставил с маркировкой 226А. При первом же включении от батареи никаких признаков жизни. На входе 12 В есть. При отключении батареи и подключении USB лампочки горят - определяется…
Мотормаунты такие неспроста. Стоило написать, это не первый и не второй опыт с квадратным профилем. Моторы вплоть до 2212 вполне можно крепить непосредственно к лучу двумя болтами. Но более мощные моторы с 14" винтом - нафиг, нафиг.
У меня стоят 14 винты и без моунтов. Просто сделал вынос луча чуть дальше за мотор. На крайняк просто ломаются пропы.Лучи из алюминиевого квадратного профиля 14 мм.
Всем доброго дня. Назрел вопрос, может ли АПМ передавать некорректные данные в протокол MAVLink?
Насколько помнб ОСДшку мавлинковскую у многих проблемы отражением части информации. Просто нули стоят. Я просто купил МинимОСД Зелененькую “не мавлинк” И всё там ОК. А долбался помню оч долго - так и не победил. Тут где то даже тема была про это.
Наверняка извечная проблема - вибрации, резонансы.
Да вот как бы и нет. Судя по логу вибрации в 95% в допустимых пределах. Исключения составляют смены режимов полета. И то только в начале, а потом всё ОК. В момент сбоя вибрации минимальны.
А сколько демферов вешать для подвеса в 200 гр. Вообще лучше когда их больше или меньше?
Из за чего Roll и Dessroll в противофазе могут быть?
Vasilich11 Вы на напряжение батареи обратите внимание, 10 вольт, 9.9, а то и ниже, это край, и аккумулятор сдохнет, и коптер упадет кому ни будь на голову.
Показания вольтметра неправильные. На борту ещё пищалка стоит и он с отсечкой на пищалке 3,5 на банку по бортовым показаниям разряда ещё летает минут 5.
Батарея 5200 - так вот она разрядилась на момент посадки только на 50%
Летал в 5 часов утра - на улицах не души.
Всем привет. В логах не сильно но соображаю. Но вот по механическим отклонениям не очень. Может кто что сказать что произошло в начале 6й минуты перед режимом РТЛ?
Есть видео с курсовой камеры, и с камеры на подвесе. Вчера борясь с желе на камере подвесил на подвес свинца для утяжеления. И не проверил как будет вести себя. А оказалось что он мешает ходу подвеса. В итоге в полете по камере на подвесе видно что подвес подклинивал но возвращался в горизонт. Когда развернулся домой (как раз 6-я минута началась) подвес как то хитро переклинило и винты перешли в “дёрганый режим” работы. Летал в альтхолде. Все рули кроме PItch отрабатываль нормально, а питч как будто инвертировали. Ну я раз такое дело включаю РТЛ. Полетел . При заходе на посадку его как то возило перед приземлением. Когда до земли оставалось метра 3 его начало тянуть на машину хорошо так, в итоге я врубил стабилайз. Опять (как потом уже понял) все рули нормально а питч в инверте - я на себя, а он от меня - чем больше на себя тяну тем сильнее он от меня летит. В итоге с метра стукнулся подвесом. В минусе ноги, и экран камеры(клон SJ4000).Вот не могу понять мог этому всему виной стать заклинивший подвес?
При включении из режима АльтХолд в Лоитер - резко даётся газ и коптер летит вперед метров на 5 потом останавливается и отрабатывает лоитер как нужно. С чем может быть связано? В альтхолд - всё как нужно отрабатывает.
2х 5200 мАч 45С
Это ясно а из того что я выбираю?
В полете потребляемый ток 18-23А (вес 2.2 кг)
Вот думаю какой лучше аккумулятор взять - 6300 мАч 35С или 5200 мАч 45С? разница в 80 грамм (смотрю ОНБО марку)
Что бы дольше летало.
настроить BATT_AMP_PERVOLT количество вольт соответствующих 1А тока проходящего через сенсор тока
сначала офсетом регулируется ноль при нулевом потреблении, затем подключается балласт на ток близкий к рабочему (например мощная галогеновая 12 вольтовая лампа) и выставляется чувствительность BATT_AMP_PERVOLT
Блииин Вот я тугодумный. С 10 раза только понял, плюс ещё консультировался у себя - у специалиста по радиоэлектронике))) Пхал тестер в батарею паралельно - как не спалил - не знаю)))
В итоге множитель с 18 перекинул на 9.5 - и стал показывать адекватные вещи)))
ЗЫ, Если менять батарею другого номинала - в МП только количество мАч поменять и всё? Калибровать ничего не надо?
Нифига не пойму и не найду - как датчик тока калибруется? Вольтметр - везде рассказывается, а тока?
фигня какаято.
скорее всего у вас датчик тока неверно откалиброван.
Блин а как его калибровать? Я думал калибровкой вольтажа всё и заканчивается. Везде пишут что надо , да что то не найду хоть одного описания.
PS А чёт нашёл - у меня на А1 подаётся питание на контроллер. Через убек. … Поёду читать дальше
Дилема сейчас у меня…
Борт 2.2 кг весом со всем оборудованием. Движки Gartt ML3508 700Кв и винты 14*4.7 Висит на 50% а летает на 60% без проблем.
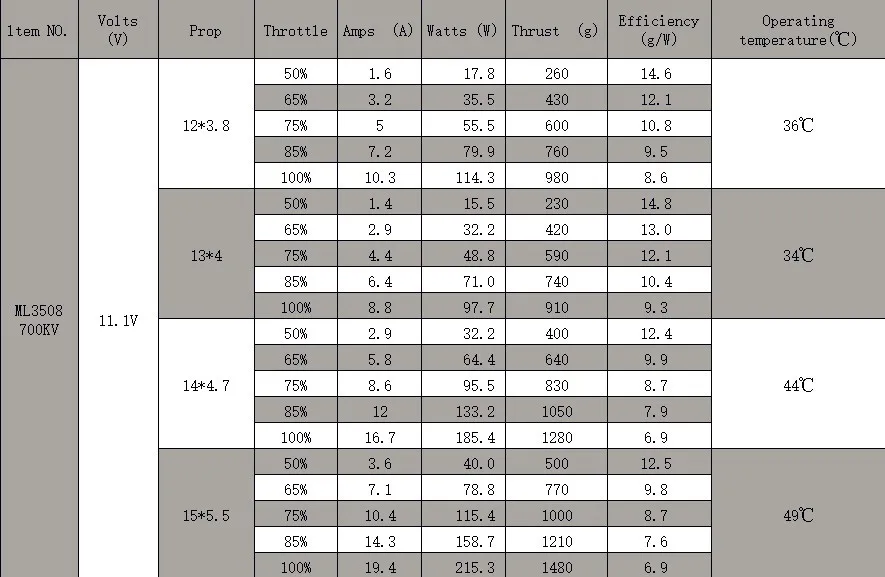
Вот такие характеристики. Жрет тока в полете 50-54А - Вот даже не знаю - для этого веса и моторов с пропами это норм? - это первое
Второе. Акк ОНБО 5200 3S 35-70С - разряжал до 9В и заливал до максимума - получалось как в аптеке - 5210мАч, Настраиваю повер модуль в МП на 5200 выставляю значение - вольтаж калибрую под значение батареи. В итоге по данным с борта акк до 20% заряда разряжается при вышеназванном токе за 7-8 мин. И потом после этого заливается в батарею 3150 мАч.
Я вот что думаю - по ходу акк вырабатывает не полностью разрешенную ёмкость. Может в МП поболее сделать ёмкость? Скажем так до 5600мАч?
В общем КАЖЕТСЯ МНЕ, что ток сильно большой, и в полете время слишком мало - вопрос исправимо ли это?
Аккуцел от турниги. Умная зарядка. Странно. Разрядилось с 12,6В до 9 на 3800 мАч, а залило потом на 5200 - )) как в аптеке)
попробуй пару циклов зарядки разрядки большими токами , иногда помогает, но не глубоко разряжать
до 9 вольт разряжаю - он цука больше 1С разряд не даёт, а реально разряжает вообще 0.5С ((
Цел день сёдня на работе разряжал и не разрядил до конца) Разрядилось до 9В в целом 4200, сейчас заряжаю 2.2С
Подскажите, везде просто находит восстановление умерших акков, а у меня нормальный Акк, просто из 5200 ёмкости заливается 3800. Банки не вздуты всегда заряжал током в 2С. Реально как хоть частично восстановить ёмкость? Раньше заливалось 4500 чётко при неполном разряде батареи.
аккумы не раздуло? вообще странно
Да нее.
Эх, пересилил я лень и залез, туда куда не хотелось. Вот что увидел… Олин из силовых проводов идущих к общей шине пропалил изоляцию и коротил по ходу на корпус. Вопрос в следующем- какие последствия после этого и где отлавливать?
Сгорел контроллер. Перед этим я мучался с тем, что у меня при полнозаряженной батарее мгновенный разряд в полете происходил за 10 секунди и борт садился по фэйлсейву. Здесь задавал вопрос - кто то сказал что измерительный резистор накрылся на повермодуле. Ок. Новый контроллер, новый повермодуль - всё повторяется. Толь надеюсь что контроллер пока не спалил. Начинаю анализировать. Вспомнил, что когда сверлил дырку в луче - повредил один из 3х проводов от регулятора к мотору. И он коротил на корпус рамы. Через какое то время(даже успел попускать моторы несколько раз - НЕ ЛЕТАЯ) я начал облегчать раму и перебирать оборудование - увидел это и запаял провод.
Сегодня что бы скачать ЛОг подключал контроллер к компьютеру. и услышал щелчки КЗ как раз где в районе регулятора провод которого был поврежден.
Подскажите кто понимает процесс - что могло произойти? Как можно проверить регулятор? Выкладываю лог(если он конечно поможет).