New entries

Ранее уже писал про диспенсеры паяльных паст. Доехали кнопочки и смог их самолично протыкать на предмет удобства. Выбирал из доступных на LCSC, но самые правильные там тоже были.

Т.к. дозатор штука повышенной точности, то кнопка должна нажиматься легко. Если сильно напрягаться - игла собьется с площадки. Можно конечно и педалькой выкрутиться, но это для профессионалов. Так что первое на что смотрим - минимальное усилие нажатия.
Часть первая, про рефлектометр Arinst VR 23-6200:
rcopen.com/forum/f6/topic544997
Часть вторая, про анализатор спектра с трекинг генератором Arinst SSA-TG R2:
rcopen.com/forum/f6/topic544997/2
Или сразу обе части на Хабре: habr.com/ru/post/462451/
English version: fpv-community.ru/…/1817-comparative-review-of-port…
Не ради флейма, а чтобы не потерять. Пока без особых комментариев, надо будет еще подумать.
Носитель - Mikado Logo 690, VBar NEO (VBC), Xnova XTS 4530-480KV 5+5YY, пиньён 13T. Графики кликабельные. Полеты примерно одинаковые в стиле “трынь-пынь”. Батареи одни и те же - 2x Forsage (декларируются как генсы) 6S 4000 60С, свежие - чуть больше 20 циклов.
Hobbywing V4 130HV, гувер VBar. Целевые обороты 1980
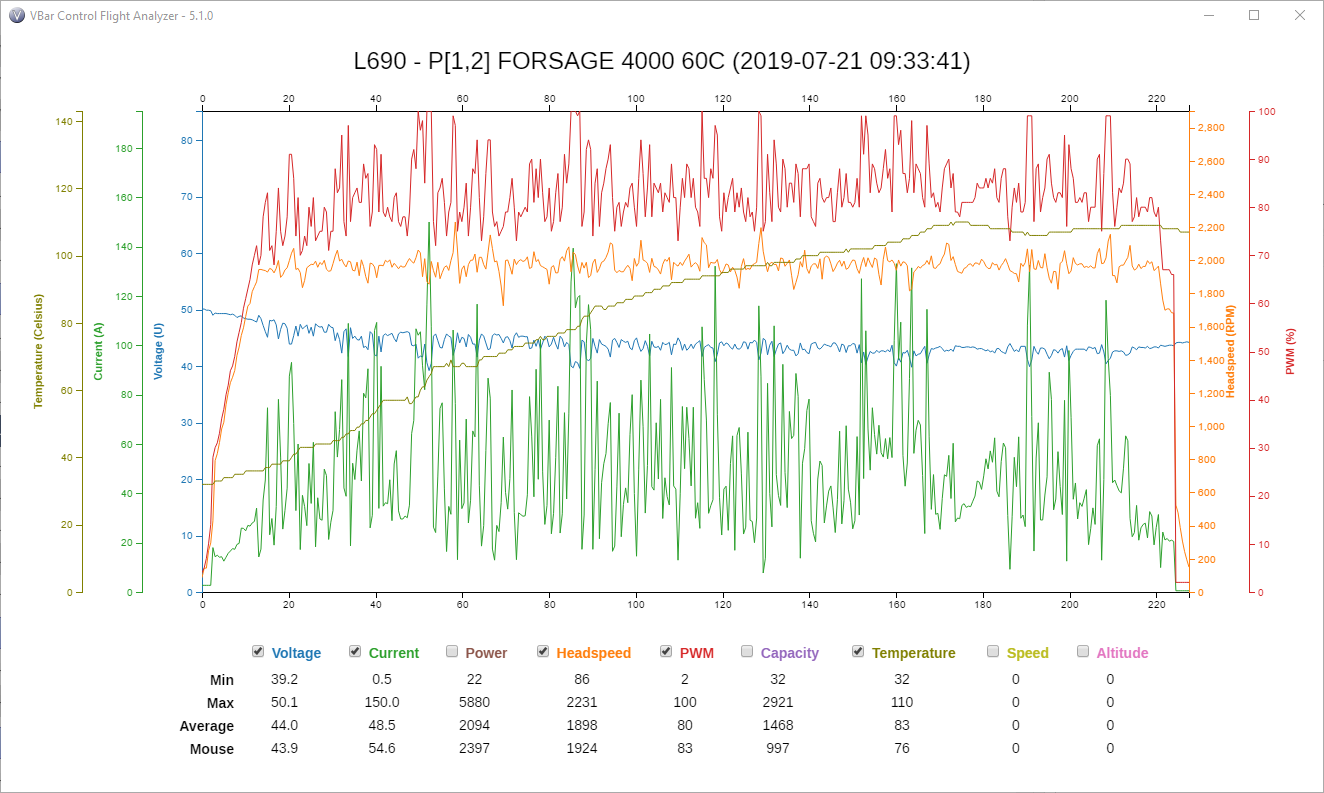
Как не крутил настройки, но либо сильные просадки, либо перекруты (как на картинке выше). Пробовал гувер HW, тоже не очень. На температуру можно не смотреть, я ее видимо криво считаю.
Из-за ужесточения законов не буду выкладывать больше видео.
Покажу кусочек испанского отпуска на прощание. Всем удачных полетов!
FPV полеты на мини самолетике. Запись ведется с DVR (шлем), более хорошую камеру еще не поставил.
Слева красный, а справа зеленый.

Настало время большого техосмотра моей птицы
Первое за что взялся это главный ротор, а именно хаб и цапфы. Разобрал почистил осмотрел:
-
Винт был уже слабо затянут. Еще раз почищу от смазки и залоктайчу
-
Видны следы черного масла с одной стороны вала
-
Чуть чуть разбились демпфера со стороны вала
-
Чуть чуть захрустел один подшипник цапфы, что ближе к хабу
Смазка вся на месте, упорные в идеале. Вся механика ходит легко без люфтов.
“Центровка модели в пределах 25%-35% САХ.”
Знакомо? О то-ж.
Сах известен. Отмерили в корне. Вывесили, выставили … не летит!
Да что за дела …
А ларчик просто открывался.
Для случая не прямоугольных, в плане, крыльев и выставления ЦТ (центра тяжести) от ПК (передняя кромка в корневой части крыла, или на жаргоне: “в руте”) необходимо учитывать отстояние ПК в точке САХ от ПК в руте. Эта величина обзывается “offset”.
“Offset”, если дословно с буржуинского, “смещение”.
Графически:
Сделал ретранслятор из PPM сигнала обычного приемника в R9M с поддержкой US/EU/Flex, выбора мощности, bind, range check и т.д.
Подробнее см. проект на github: github.com/Andrey-Prikupets/RC/tree/…/R9M_Relay
Не смотря на все старания правительства, санкции и глобальное потепление, Приморский и Хабаровский край летают!
Первенство прошло в доброй и дружественной обстановке.
Все кто смогли, добрались.
Погода - расстаралась, и выдала хороший, не жаркий и не сильно ветренный день. Дуло от 3 до 5-6 м/с.
Пузыри периодически отрывались, как правило, в перерывах между турами, но порой везло и в турах, и тогда “мётлы” уходили “в космос”.
Эта запись сделана для себя, ибо ничего не потерять и упростить себе жизнь в будущем 😃
И так - Апельсинка или Orange Pi, а именно Lite 2.
Корабликами для рыбалки, да вообще корабликами, занялся недавно - чуть больше двух лет.
Сначала думал сделаю для рыбалки, и вот оно счастье… но, как то засосало;)
Первый кораблик сделал не совсем удачно, точнее совсем не удачно… Нашел на авито готовый корпус “Вега”, заказал его. Одновременно заказал комплектующие…
Пока это все шло, первый кораблик каждый день маячил перед глазами… ну взял я да переделал его. Не радикально, конечно, но совсем. Далее были переделки и сборки готовых корабликов и из покупных корпусов, для знакомых. Не, не коммерция - просто, да и всего то было 4 корабля “на лево”. Но червяк в башке точил мозг - сделать новый, собою придуманный.
Это была предыстория, теперь по существу:
Первый кораблик я назвал “ХОББИ”, и вторым решил продолжить эту серию. Так, название есть - а это уже пол делаB-)
В тех задании было: Корпус стеклопластиковый, средне скоростной (18-20 км/ч. порожняком) при разумном потреблении. Ну и грузоподъёмность около 2 литров (если выйдет).
Сейчас образовалась тенденция для корабликов: 20-30 км/ч при потреблении около пол киловатта, иногда и больше. Такой скорости мне не нужно, ещё больше не нужно такого расхода.
Решил делать моногидрон. На этапе набросков появилась гидролыжа. Далее приступил к изготовлению модели нижнего корпуса.
утренний отстроечный полет зетки. вот теперь пожалуй я доволен полетом и картинкой
матек 411 винг, ранкам сплит, видео 5.8, радио 433 hawkeye
Вот хорошее сравнительное видео по этой теме:
Подлетнул тут на днях, исполнил данюю хотелку
PS Все в рамках закона. Ничего не нарушил ,)
Все картинки кликабельны
Наконец-то я обшил крылья и поставил на Ла 7. Нечего необычного. С удивлением обнаружил, что предыдущие крылья крепились по большей части не за лонжероны к корпусу, а за обшивку. Они тогда были сделаны мною буквально криво.
Выточил из дерева лопасти пропелера и кок, но его не доделал до оригинальной формы.
Вот ,собственно говоря, фото:
Иногда возникает необходимость связать несколько плат Ардуино для передачи данных. Решения делятся на проводные и беспроводные. Далее подборка полезных ссылок:
Придумал способ как дешево и сердито заменить пластилиновый боёк в китайском автоматическом кернере. Ну и конечно так чтобы обойтись без токарки, только болгаркой и шуруповертом 😃. И материалы чтобы были доступные, а не поршни от тепловоза.

Всем известны блоки реле для ардуино на Али. Все бы хорошо, но щелкают они сильно. А хуже всего при включении нагрузки сами потребляют много электричества. Но есть и альтернатива - симисторы. И стоят подходящие для 220 В совсем недорого - ссылка на Али.
Здесь человек заменил реле в сенсорном выключателе на свою схему. Детали взял из старых блоков питания. В статье есть схема. Ссылка.
В этом видео рассказывает о подключении дешевой сенсорной платы к рели и симистору. Также есть схема. Ссылка.
Та же тема управления мощной нагрузкой на симисторах, но с большим обсуждением: ссылка.
Увлекаюсь моделями реактивных двигателей 😃 ищу единомышлиников;)
Давно тут не делал записей. Теперь в ходу только один Скай (с Вовиной телеметрией расстался - тяжело две (таких разных) тянуть). Аккумуляторов много , они все разные. Решил взвесить. С самыми лёгкими аккумуляторами вес 2210 Гр., с самым тяжёлым аккумулятором 2480 Гр. Успехи в даль 5 КМ, вверх 1100 м.
Это модная нынче вещь. Начал знакомиться с азами.
Очень полезная книга для начинающих “Robot Operating System for Absolute Beginners”. Есть в сети и в папке Downloads лэптопа. 😃
Очень многие проекты на ардуино требуют передачи информации из удаленных мест. Для этого часто используют дешевые GSM модули с Али. Подробные объяснения по работе с этими модулями даются в следующих роликах:
- Как выбрать, подключение, введение в AT-команды - ссылка
- AT-команды, звонки, SMS, SMS-управление - ссылка
- SMS на русском, USSD, PDU-формат, UCS2 - ссылка
- DTMF: парсинг, управление, безопасность - ссылка
А вот здесь текстовый вариант вышеприведенного.
Давно я что-то ничего не писал… Отошел на время от любимого хобби, но вот решил вернуться.
Весной закончил собирать свой 3Д принтер и подумал, а что же печатать? И решил реализовать давнюю мечту - складной трикоптер! Конечно, раньше я уже собирал такой, но там было много “колхозного”. Итак, решено! Трикоптеру быть!
Смоделировал все детали, собрал виртуальную сборку - вроде бы получается. Печатаем, собираем, паяем, настраиваем и в полет! Месяц прошел от проектирования до полета, я доволен!
В ходе полетов ни одно животное не пострадало , минус два мотора и батка . Прати ди Тиво заслуживает особого внимания ландшафта, являясь одним из наиболее характерных и знаменитых горных мест провинции Терамо, а также одной из точек доступа к основным вершинам Гран Сассо. Из города, окруженного миндально-буковым лесами, можно наблюдать за северной стеной самой высокой вершины континентального Апеннинского хребта (Корно-Гранде 2912 м ) и суровостью его известково-доломитового облика.
Из предисловия: Было это еще зимой, и для нового своего проекта решил я попробовать использовать в качестве движителя водометный.
Купленный водомет, на мой взгляд, имел кое какие недостатки, которые я и попытался устранить. На сколько верно я это сделал, я не знаю, но упор на швартовых при увеличился почти в два раза…
Вот “подопытный” - то что пришло из Китая.

Дошли руки написать нормальную инструкцию по сборке нашей поделки. Вроде неплохо вышло: github.com/speedcontrols/…/assembly.md

Формы для отливки 1/2 трака гусиничек 😃
Масштаб 1:51.

Чем интересна была работа? Дык, вот этим:
Самый первый запуск. Пока сделали только механику. Система запуска , управление, обдув, пока в стадии разработки.
Для проверки эффективности антенн использую измеритель мощности “8GHz 1-8000Mhz OLED RF Power Meter -55 till -5 dBm”.

Тест нового видео передатчика Matek VTX-HV, с антенной FOXEER Lollipop PA1401. На приеме Triple Feed Patch 9.4dBi, и Пагода 3b/
- Тест FlySky I6X с двумя бустерами XQ-02A, и антеннами TL-ANT2409CL, приемник FS-IA10B.
Сегодня открыл и закрыл сезон, на втором полёте внезапно на борту отрубилось питание, заглох мотор и управление вырубилось. Просто смотрел как он падает морковкой. Что то конечно осталось… хвост, крыло. Самое прикольное что были жертвы, на цилиндре мотора размозжённая мышка…Первая мысль, что самолёт протаранил её при падении, а потом мысли интереснее. А что если мышь летала в самолёте? Ну типа заползла в гараже в него, у меня там они водятся, или на поле пока самолёт стоял собранный через отверстия обдува в капоте, он минут 40 стоял пока я на электричках летал. Типа летала, перекусила провода важные - управление потерялось, мотор заглох, в общем решила посадить самолёт.
pp.userapi.com/…/leKEuNuoeBg.jpg (2.8 MB)
Восстанавливать не буду. Красиво мышка померла.
Навигация робота с помощью вращающегося лидара - задача нетривиальная. Помимо всего прочего она требует больших вычислительных ресурсов.
Один из вариантов ее решения: пчелиный алгоритм обработки данных.
Очень занятный проект самодельного CNC из деталей, напечатанных на 3D принтере. При желании можно будет повторить.
Проект построен на моторах Nemo 17. Управляющая плата Arduino Uno. Подключение моторов через Arduino CNC Shield. Управляющее ПО - GRBL.
Рельсы для Y и X осей - оцинкованные стальные трубы квадратного сечения 20х20 длиной 1000 mm (Y) и 820 mm (X). Z ось из алюминивой трубы 15х15 длиной 215 mm.
ШВП - стальные шпильки диаметром 8 mm.
Приблизительная стоимость - 340 долларов.
Ссылка на Гитхаб со всеми материалами: ссылка.
Не секрет, что среди видео-передатчиков китайского производства, периодически попадаются различные дефекты, такие как: перепутанные наклейки на заводе, когда под мощностью 200 мВт, продаётся 400 или 600 мВт. Или наоборот, на наклейке указано 500 мВт, а в реальности при измерении оказывается 180-200 мВт.
Известно, что китайские FPV модули часто страдают качеством изготовления, и в серии не тестируются перед продажей, ибо это всё идёт под грифом “несерьёзные игрушки”. По этому все доводочно-тюнинговые и настроечные работы, ложатся на самих юзеров. Лично я всегда сортирую и отбираю на приборных стендах всю входящую комплектуху, применяя для реальных сетапов только полностью кондиционные блоки, модули, TX и RX. А с антеннами вообще всегда отдельные работы, так как это главные преобразователи переменного напряжения в электро-магнитное поле, и генераторы для обратного преобразования. От чёткости их настроек и согласования, очень сильно зависит результат работы радиолинка.
hackaday.com/…/solder-paste-dispenser-has-no-3d-pr…
С удивлением узнал, что для дома есть намного более продвинутые способы нанесения пасты на плату, чем выдавливание руками из шприца. Облазал все интернеты, результат следующий:
- Есть проекты на thingiverse, все на моторчиках 28BYJ-48. Компоновка так себе. Особенно USB-разъем сбоку, из-за которого будет постоянно путаться провод.
- Есть словацкий проект (см. ссылку в начале), который мне понравился внешне, но не опенсорсный и требующий токарки. И вообще не очень понятно, как его покупать.
Короче, как обычно, решил что мог бы сделать лучше 😃. Взять компактную компоновку, но вместо токарки вывернуться 3d-печатью и детальками с алиэкспресса. Должно получиться долларов 10-20, в зависимости от того, сколько собирать. Даже для тех кто не паяет пастой, штука для подачи флюса тоже очень удобная.
Я его наконец-то доделал. Всего полгода и долгожданный первый запуск моего нового кораблика для рыбалки и подводной видеосьемки. Надеюсь теперь мне хватит места для установки и под нормальное “окно в подводный мир”, и под погружной модуль подводного видеонаблюдения, и под рыболовные приспособления и под все прочее 😉
По итогам запуска. Вес может быть чуть меньше расчетного 50 вместо 60кг. Все остальное в принципе ок. Из-за погружного видеомодуля особенно переживал за поперечную остойчивость, но и тут все ок. Остойчивость с запасом. Я могу спокойно работать дальше.
мотоустановки.
есть у меня такой самолетик

и стоял на нем электромотор в почти киловатт…
но так как батарейки в последнее время стали проблеммой, то решено было поменять движек на калилку 46 калибра.
моторчик встал как родной, центровка на месте, взлетный вес 2100.
Была реализована идея использовать спутниковую тарелку для fpv полётов, установив в фокус антенны GEPRC Triple Feed Patch-1, приёмник RC832 и передатчик-ретранслятор AKK Nano 1.
Проект планера с размахом в 700мм.
Чертежи (сделаны мною, конечно, коряво в приложении GnaCad) Возможно буду их изменять по мере дальнейшей разработки:
PDF версия чертежа
Dwg чертёж
У нормальных трихромов спектральная чувствительность распределяется вот так:

Надоело летать и снимать Землю, решил поснимать Луну 😃 Ночь выдалась хорошая, с чистой атмосферой и правильным освещением нашего естественного спутника.
Будь проще
и люди к тебе потянутся.
На сегодня все самолетики, разлетающиеся по нашей бескрайней из моей мастерской, имеют в крыле пластиковый кабель-канал.
Чтоб проще было проводку пробросить. Ну, это понятно.
Но вот закрывать кабель канал, это довольно много телодвижений, включая финишную шпаклевку траншеи канал, зашкуривание ядра и т.д. и т.п.
Все бы ничего, но плотность материала в месте шпаклевания отличается, и приходится маскировать участок крыла доп слоем материала. Обычно это пара прядей ровинга.
А на размахе Абсента, это + 10 грамм, только шпакли. И еще 10 грамм ровинга.
Упрощаем, стал-быть.
Средство упрощения - двухкомпонентный полиуретан. Foam-It.
В траншею кабельканал, и из шприца полоску полиуретана.
Отлетал с десяток полетов. И появился план по доработкам.
- Облегчение коптера. Тяжелый. Очень для такого размера тяжелый. Из видимого пока — менять родные провода на шлейфы, как это делал коллега из комментариев ко второму посту. Можно пошаманить с крепежом, выкинуть защиту двигателей.
1.5. Прям отдельным пунктом. Вопрос про корпус от osd. Можно ли его снять? Будут ли последствия?
-
Хочу попробовать поставить 6" винты.
-
Уберу весь колхоз с креплениями камеры (стоит микрокамера).
-
Нужно крепление для гоупро. Пока примотал снизу на липучку для аккумулятора, но решение прям такое… Или же ставить DVR на борт.
-
Бипер подключен на канал для подвеса, включается тумблером. В принципе работает, но хочется изящнее решения чтоль.