двигатели + винты= характеристики (для мультикоптеров и других ла)

геометрически симметричное фуфло. годится только для рубки травы. к понятию винт и аэродинамика не имеет никакого отношения.
Ага, показатели тяги на 60% хуже обычных пластмассовых SF пропов. Амперы любит, моторы греет, тянуть не хочет 😁. Это я еще даже на коптер их не ставил.
Построено по данным Никиты Есенина. По вертикальной оси КПД мотора. По горизонтальной - мощность на валу (механическая).
Построено по данным Никиты Есенина. По вертикальной оси КПД мотора. По горизонтальной - мощность на валу (механическая).
нет так нельзя данные представлять. какие выводы по ним можно сделать? что при мощности 180 Вт на 5S кпд 70% а при 6S 80%? ничего подобного.
я помню на 5S был пропеллер 1447, который имеет более крутую кривую момент/обороты, а на 6S гонял пропы 9-12 дюймов которые по моменту гораздо ниже и для мотора сего вообще как нагрузка ни о чем, от того и КПД максимальный
гораздо информативней рисунки от сюда diydrones.com/…/motor-and-propeller-test-jig

тут уже становится понятно что есть некие оптимальные зоны по моменту\оборотам в которых КПД выше чем в других. почему так отдельный вопрос. как к моторам (в статье там хз вообще что использовали) так и к регуляторам\настройкам.
для пропеллеров берем кривые
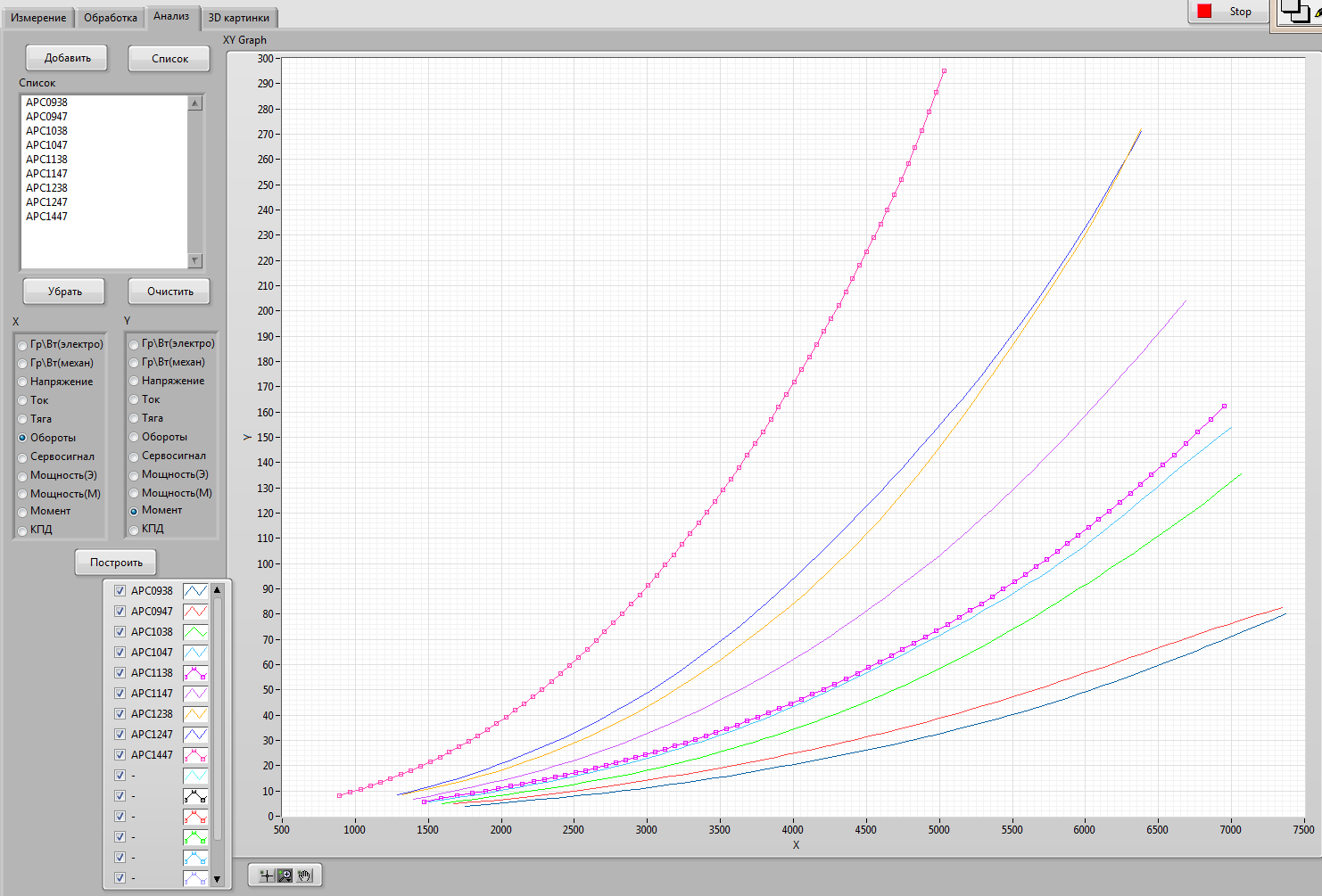
и смотрим в какие зоны они попадают.
причем в пересчете на гр\вт(электро) выигрывают у нас связки с наиболее большим пропеллером( чем больше тем лучше с поправкой на правильность геометрии ) не за счет максимального КПД, а за счет большей собственной эффективности пропеллера.
нет так нельзя данные представлять. какие выводы по ним можно сделать?
Соглашусь, что такой график содержит много неоднозначности. Насчет можно или нельзя - можно - что не запрещено, то разрешено 😃. Вчера ковырял Ваши данные, чтобы самому понять, что такое БК-мотор. Этот график был первым, по которому мне было что-то видно. Выводы для себя сделал такие:
- Если хотите использовать полную мощность мотора, надо брать максимально допустимое для этого мотора напряжение.
- Максимальный КПД на большом напряжении выше, чем при низком (ср. 6S и 4S). Но не драматически.
- Мотор имеет приемлемый КПД в довольно широком (минимум 3-х кратном) диапазоне мощностей.
гораздо информативней рисунки отсюда
Согласен. Когда первый раз смотрел, не оценил, теперь - оценил. Действительно, состояние мотора однозначно определяется парой обороты-мощность на валу (или обороты-момент - это все равно). Правда, есть еще третья переменная - питающее напряжение. Попробую такую диаграмму по Вашим данным получить.
Да, там ошибка на картинке. KV на самом деле 380, а не 320.
Вот то, что Вы хотели, Никита. Мотор тот же. Слева - 4S, справа - 6S. По горизонтали - обороты, по вертикали мощность (мощность привычней, чем момент). КПД, например, 0.7 означает 0,7 и выше (до 0,8).
- Максимальный КПД на большом напряжении выше, чем при низком (ср. 6S и 4S). Но не драматически.
вывод не верный. в данном случае именно на этом напряжении тестировались пропеллеры лучше всего попадающий в оптимальные зоны. максимальный КПД был на 1047 при полном газе.
я ранее пытался проверять зависимость от напряжения (на старом стенде без замера момента оборотов)

по X напряжение по Z гр\Вт по Y тяга.
тут 3 замера на 22.2 на 18.5 и 14.8. получилось что общая эффективность растет с уменьшением напряжения, но и падают максимальные обороты. так как пропеллер был один и тот же, дело стало быть в КПД мотор\регулятор и тонкостях замеров.
например я не удосужился при замерах измерить точный ток потребления регулятором на каждом напряжении. а брал его за константу что в результате дает нам разную долю Вт улетающих просто на работу электроники регулятора без вращения двигателя. и да нельзя замерить ток только мотора. у нас всегда присутствует регулятор, который может быть очень плох.
вот скажем сейчас я приобрел для стенда такой регулятор banggood.com/…/Hobbywing-XRotor-50A-APAC-Brushless… и обнаружил что он имеет странности в питание. при напряжении до 14.5 в он ест вплоть до 0.09А а после- 0.027А как буд то у него 2 схемы преобразователя напряжения для питания контроллера и он переключается между ними. а это все идет в КПД.
по X напряжение по Z гр\Вт по Y тяга.
Мои данные к тяге и пропеллерам вообще не имеют отношения. Я говорю о КПД мотора (вместе с регулятором, увы). Не пойму сразу, как это влияет на Ваши аргументы. Но на всякий случай.
В только что опубликованных диаграммах я вижу подтверждение своего вывода. Низкое напряжение просто не позволяет мотору достичь мощности и оборотов своего максимального КПД. А на одном конкретном пропеллере может оказаться и наоборот (низкое напряжение выгодней высокого).

Тяга нужна больше, вывод надо поднимать питание до 12S или KV до 200,
На стенде ведь, наверное, можно 12S обеспечить и посмотреть что из этого выйдет. Нет?
На стенде ведь, наверное, можно 12S обеспечить и посмотреть что из этого выйдет. Нет?
Для меня проще перемотать, чем HV ESC покупать, а ежели не подойдёт, так ведь и не продашь потом;).
Вот для более мочных дел можно брать моторколесо 48-72V для велика со встроенным регом😈.
Да, про регулятор я не подумал
Други, я вот что-то сейчас немного в осадок выпал. Все время думал, что у Sunnysky X2212-980 максимальная мощность 180 Вт, да и ecalc вроде выдавал все время 180, я и поэтому батарею 4s и не ставил, а тут смотрю калькулятор выдает 300вт, да и на сайте тоже указано 300вт, они чтоли выпустили новую версию?
ЗЫ двигуны куплены в сентябре, в то время были вроде 180 вт
они чтоли выпустили новую версию?
так они переименовали или модернизировали? 😃
Как качество этих пропов и двигателя по вашему мнению? Баланс хороший?
Лучше конечно повышать напряжение, чем kv. imho. А регуль бы взяли на будущее для тестов, думаю что периодически на нём будете крутить разные двигатели под 12s.
Интересно, сколько получается при 12S с таким двигом и пропом?
Как качество этих пропов и двигателя по вашему мнению? Баланс хороший?
Лучше конечно повышать напряжение, чем kv. imho. А регуль бы взяли на будущее для тестов, думаю что периодически на нём будете крутить разные двигатели под 12s.
Интересно, сколько получается при 12S с таким двигом и пропом?
На движках следов балансировки нет, а пропы требуется балансировать всегда, та что дисбаланс лёгкий есть.
На счёт повышения напруги спорный вопрос, анализ в Maxwel RMxprt Design показал,что лучше поднять KV до 190 и остаться на 6S.
Было 12 витков 1 жила 0.65, будет 4 витка 7 жил 0.4.
На движках следов балансировки нет,
Сколько штук этих движков вы уже покрутили? Когда двиг без пропа крутится вибрации есть?
а пропы требуется балансировать всегда, та что дисбаланс лёгкий есть.
Не все и не всегда, к примеру 18x6.1 t-motor тонкого баланса требуют только 50% пропов по моей статистике из ~15 пропов.
Этот лёгкий дизбаланс 26х пропов равен разнице во сколько десятых/сотых грамма, их же можно взвесить каждую лопасть?
На счёт повышения напруги спорный вопрос, анализ в Maxwel RMxprt Design показал,что лучше поднять KV до 190 и остаться на 6S.
Было 12 витков 1 жила 0.65, будет 4 витка 7 жил 0.4.
Очень интересно посмотреть на результат перемотки, ждём.
Сколько штук этих движков вы уже покрутили? Когда двиг без пропа крутится вибрации есть?
Пока 4 шт. , вибрация скорее от винтов, у близких по весу пар лопастей разница в 0.4 гр., так что бум шкурить.
Не все и не всегда, к примеру 18x6.1 t-motor тонкого баланса требуют только 50% пропов по моей статистике из ~15 пропов.
Но проверяем каждый.
их же можно взвесить каждую лопасть?
Когда балансируем целый двухлопастный проп, допустим, с помощью изоленты, то мы меняем вес грузика или меняем расстояние от центра.
Вопрос: при балансировке пропа из двух раздельных лопастей на какое место лопасти прикреплять грузик, компенсирующий разницу в весе😈?
так они переименовали или модернизировали?
Переимменовали, конечно… Как можно модернизировать статор 2212, чтобы мотор вдруг в 2 раза мощнее стал? Есть куча способов повысить мощность мотора, но на 2-5%, а не вдвое…
Вопрос: при балансировке пропа из двух раздельных лопастей на какое место лопасти прикреплять грузик, компенсирующий разницу в весе?
Я бы посередине лопасти вначале приклеил, поставил бы на стенд, крутил и двигал бы этот грузик ближе-дальше от центра.
Если пропмаунт сквозной по центру, то конечно вначале на магнитном балансире проп проверить, а потом уже крутить.
Пока 4 шт. , вибрация скорее от винтов, у близких по весу пар лопастей разница в 0.4 гр., так что бум шкурить.
Важно что двиги без следов балансировки и без вибраций - это значит качество ротора точное.