Полетный контроллер DJI Naza M v1

Ну сами посудите - все моторы “дуют” вниз. Квадрик как на льду, любой дестабилизирующий фактор (порыв ветра или просто минимальная горизонтальная скорость) с легкостью переместит его в горизонте (проскользит). Другое дело когда все моторы “дуют” под углом к вертикале, тем самым “центрируя” квадрик в горизонте.
ДА, МНЕ ТАК КАЖЕТСЯ. На деле в штиль стоит как прибитый, и относительно как прибитый смотря какой ветер.
Покритикуйте если я не прав.
Ну в теории похоже на то, я думая шайбы подложить можно и попробовать
Ну в теории похоже на то, я думая шайбы подложить можно и попробовать
Попробовать завсегда нужно!
Главное соблюсти одинаковый выкос на всех моторах.
во первых квадрик постоянно куда-либо ведет
Как тут уже написали, при отсутсnвии GPS по-другому быть не может. Если ведет систематически в какую-то одну сторону при отсутствии ветра (проверить можно только в зале), то можно подстроить триммерами на пульте.
Ну в теории похоже на то, я думая шайбы подложить можно и попробовать
Не надо никакого выкоса на этой раме делать.
вот Вы щелкаете что то, но я не увидел переключения в мануал режим к букве М
Поэтому и в режим калибровки войти нельзя… я так понимаю у Вас переключатель двухпозиционный на режимы? повесьте на трехпозиционный.
По инструкции желтый мигает при Atti режиме.
и что за скачки X2 выхода-почему ползунок двигается?
Если ведет систематически в какую-то одну сторону при отсутствии ветра (проверить можно только в зале), то можно подстроить триммерами на пульте.
Вот чего НЕЛЬЗЯ делать - так это триммировать Назу! Без ГПС будет всегда куда то тянуть и дрейфовать.
Выкосы на моторах - обсуждалось сотнями страниц назад 😉 - помогают! Евгений прав в описании теории, взгляните хотя бы на DJI S800 сбоку 😉
взгляните хотя бы на DJI S800 сбоку
Про S800 в курсе. Но что такое S800 и что такое обсуждаемый коптер. Про “нельзя триммировать” ссылочку можно?
Про S800 в курсе. Но что такое S800 и что такое обсуждаемый коптер.
Вы сами то поняли? 😉 Без разницы, что 450 что 800, что пусть 1500… Физика процесса одна и та же, Евгений выше описал - повторять нет смысла. Не верите - ничем помочь не могу 😉
Про “нельзя триммировать” ссылочку можно?
Вы калибруете передатчик в программе, это “нули” Ваших стиков. От аппаратуры к аппаратуре, но почти всегда триммирование не дает запустить двигатели.
А во вторых - Наза будет думать что стик или оба стика, чуточку наклонен(ы) - и будет снова дрейфовать, только в другую сторону.
Не лечите то что лечить не надо. Дрейф без ГПС - это нормально. Потому что у Назы не к чему привязаться, она слепа и глуха = не видит что дрейфует. Шум от гироскопов и акселерометров, как ни фильтруй все равно будет чуть выше микроскопического геометрического отклонения лучей в Вашей раме. Ну и датчики в Назе не за 1500 уе, не супер промышленного применения с калибровкой на заводе в термокамере. 😉
Вы сами то поняли? Без разницы, что 450 что 800, что пусть 1500…
+100500 Андрей - ни прибавить ни убавить. Про триммирование вообще улыбнуло 😃
Про триммирование вообще улыбнуло
Семен я сторонник полного понимания 😉 Что улыбнуло то ? 😉
Без разницы, что 450 что 800
Ни разу не видел маленьких коптеров с выкосами. И уж точно не следует советовать выкосы задавшему вопрос. Объяснение про “дуют под углом к вертикалЕ” на самом деле ничего не объясняет (что не значит, разумеется, что выкосы бессмысленны).
Не лечите то что лечить не надо.
Вообще-то пруфлинк просил… Если внимательно почитаете то, что я написал, то увидите, что речь идет о ситуации, если вдруг обнаружится систематический снос в одну сторону (что вряд ли). Вдруг, например, стик не центрируется… Это вполне может быть компенисровано триммером, ИМХО.
Объяснение про “дуют под углом к вертикалЕ” на самом деле ничего не объясняет (что не значит, разумеется, что выкосы бессмысленны).
Вам шашечки или ехать? Не придирайтесь к технической ошибке - тут “грамотных” пруд пруди. Иной раз глаза болят и мозг с катушек уплывает…
Вы не пробовали - а обсуждаете… “Давайте спорить о вкусе бананов с теми кто их ел” (с) 😉
Выкосы опробованы еще до выхода Назы в релиз, еще на OP CC и на GU-344, и перепроверены потом на Назе, без GPS и с GPS, и на “немце”… 😉
Вообще-то пруфлинк просил…
Какой пруф на физику процесса которая описана выше?
Постоянный дрейф в одну сторону “лечится” (читай объясняется) просто - проверяйте раму, меняйте местами лучи - как только дрейф пошел в другую сторону - ищите проблему в луче и оборудовании на нем. Это если забыть про шум гироскопов, про алгоритмы стабилизации с фильтрами в Назе, про то что в конце концов датчики аналоговые и на борту рядом с ними стоит АЦП который и рожает цифровой сигнал…
ИЛИ - ставите выкос на одном из лучей - и удивление постигнет Вас.
Дрейф будет всегда без системы GPS или ГЛОНАСС. Даже с выкосами дрейф хоть и уменьшится, но будет 😉 Триммирование дает временный эффект и не решает проблему.
Сергей, я с Вами спорить не буду… Просто потому что Вы теоретизируете, а вопрос с триммированием снят с обсуждения уважаемым бомондом в этой теме год-полтора назад.
Хотите все таки пруфлинк? 😉 Начните читать эту Тему сначала или опять таки попробуйте 😉.
Удачи!
Не придирайтесь к технической ошибке - тут “грамотных” пруд пруди.
Грамматическая ошибка отвратительна и кое-что говорит и писавшем. Но дело не в ней, а в том, что приведенное рассуждение не является объяснением. Там сказано, что дует в стороны и это хорошо, потому что известно, что это хорошо. Механизм действия выкосов по-видимому аналогичен использованию V-образного крыла, которое, как и выкосы, предназначено для повышения устойчивости по крену.
Выкосы опробованы еще до выхода Назы в релиз, еще на OP CC и на GU-344, и перепроверены потом на Назе, без GPS и с GPS, и на “немце”…
Ну Вы кроме того, что пишете, еще читайте немного. Я про выкосы в курсе. И знаю, что на больших коптерах они используются с пользой. Но не встречал использования выкосов на малоразмерных коптерах. И еще раз повторю, что предлагать лечение выкосами задавшему вопрос негуманно. Там проблема просто в понимании того, с чем он столкнулся.
Какой пруф на физику процесса которая описана выше?
Во-первых, уточню, что пруфлинк меня интересовал по вопросу о триммировании. Лучшим аргументом была бы ссылка на официальную документацию к Назе, где сказано, что нельзя триммировать. Но я неплохо читал эту документацию и по моим данным там этого нет. И, собственно, все. Если кто-то _советует_ не триммировать, то это даже может быть дельный совет. Но это не более чем совет. Я и сам пришел к тому, что не триммирую вертолеты по крену и тангажу, а регулирую тягами. Свою Назу триммировать мне тоже в голову не приходит. Но еще раз повторю, что если вдруг обнаруживается, что в зале коптер несет всегда в одну сторону, то не вижу особых препятствий, хоть и не думаю, что это требуется и не думаю, что такой систематический снос обнаружится.
Сергей, я с Вами спорить не буду…
Очень хорошо. Останемся при своих.
Хотите все таки пруфлинк?
Нет, уже не хочу. Думаю, что его нет.
С уважением.
Если кто-то _советует_ не триммировать, то это даже может быть дельный совет. Но это не более чем совет.
Вам же не придет в голову лечить насморк таблетками от желудка?
с тримерами аналогичная ситуация, необходимо искоренить причину, а не пытаться воздействовать на результат
Семен я сторонник полного понимания
Да как скольжение НАЗЫ без ГПС триммерами выровнять - нонсенс 😃
Но не встречал использования выкосов на малоразмерных коптерах.
Здесь наличие выкосов еще до НАЗЫ на ХАИРКРАФТЕ обсуждалось и делалось - размер рамы такой-же, а устойчивость увеличивалась. Да и в этой ветке очень много обсуждений и советов по этой теме. А то что плывет, то тут без ГПС ну никак не исправить 😃
Сообщение от Bluebird
Хотите все таки пруфлинк?
Нет, уже не хочу. Думаю, что его нет.
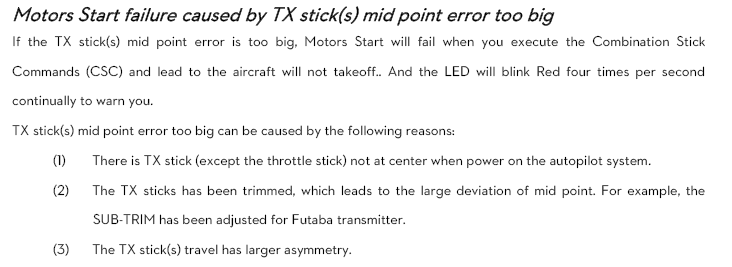
Неее, держите пруф.
Лучшим аргументом была бы ссылка на официальную документацию к Назе, где сказано, что нельзя триммировать. Но я неплохо читал эту документацию и по моим данным там этого нет.
Взято из официальной документации на Назу, крайняя страница, с официального сайта DJI.
Я и сам пришел к тому, что не триммирую вертолеты по крену и тангажу, а регулирую тягами.
Вот Вы вертолетами занимаетесь, а вникать не хотите. Ваша фундаментальная ошибка в том что: в вертолете между пилотом и автоматом перекоса нет ничего, а в коптере между пилотом и двигателями есть виртуальный пилот - контроллер с гироскопами и акселями, который и “рулит” платформой.
вот Вы щелкаете что то, но я не увидел переключения в мануал режим к букве М
я не пользуюсь М режимом,поэтому не настраивал,если хочу перейти в режим калибровки перенастраиваю аппу,чтобы ползунок двигался между нужными мне режимами.
повесьте на трехпозиционный
на dx6i 2x позиционные только.
что за скачки X2 выхода-почему ползунок двигается?
это я переключал,другим выключателем,чтобы показать,что сигнал на х2 есть
Неее, держите пруф.
Не хочется продолжать это спор… Но тут разговор про тротл. А в обсуждаемом случае разговор про правый стик.
а в коптере между пилотом и двигателями есть виртуальный пилот - контроллер с гироскопами и акселями, который и “рулит” платформой.
В коптере при отсутствии GPS тоже почти ничего нет между правым стиком и аппаратом (обратите внимание на слово почти). Автопилот только горизонталь держит, а уплывает аппарат в сторону или нет автопилоту неведомо. Вот представим себе, что дует постоянный такой легкий ветерок. Аппарат (без GPS) сносит. Что будете делать? Удерживать правым стиком, отклоняя его. То же самое, как я понимаю, будет происходить, если компенсировать триммерами правого стика. Еще раз, чтобы не было недопонимания: так делать не нужно, лучше устранить причину, чем бороться со следствием и т.д. Но в принципе такое возможно, ИМХО. И вообще, Наза без GPS - это странно.
Что будете делать? Удерживать правым стиком, отклоняя его. То же самое, как я понимаю, будет происходить, если компенсировать триммерами правого стика.
Что будет думать контроллер при повторном взлете?
Что будет думать контроллер при повторном взлете?
Вот он - краеугольный камень…
Ну да ладно. Пусть каждый заблуждается там где блуждает 😉
,если хочу перейти в режим калибровки перенастраиваю аппу,чтобы ползу
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual . Об этом уже писали выше . Из-за отсутствия 3-х позиционника я калибрую так .И не нужно каждый раз влезать в комп , перенастраивать аппу.
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual . Об этом уже писали выше . Из-за отсутствия 3-х позиционника я калибрую так .И не нужно каждый раз влезать в комп , перенастраивать аппу.
в видео отчетливо видно,что режи ГПС НЕ ВКЛЮЧАЕТСЯ ПРОГРАММНО,хоть тысячу раз в секунду переключи!!!перенастроить ниет ничего сложного можно просто реверснуть канал U и ползунок переключится между М и А!!!Вопрос в другом,в ошибке контроллера,которую показывает индикация!Посмотрите видео,которое выложено ранее,а потом советуйте.
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual .
отключите гпс и войдите в калибровку,я посмотрю получится у вас это.