Полетный контроллер DJI Naza M v1

Сообщение от Bluebird
Хотите все таки пруфлинк?
Нет, уже не хочу. Думаю, что его нет.
Неее, держите пруф.
Лучшим аргументом была бы ссылка на официальную документацию к Назе, где сказано, что нельзя триммировать. Но я неплохо читал эту документацию и по моим данным там этого нет.
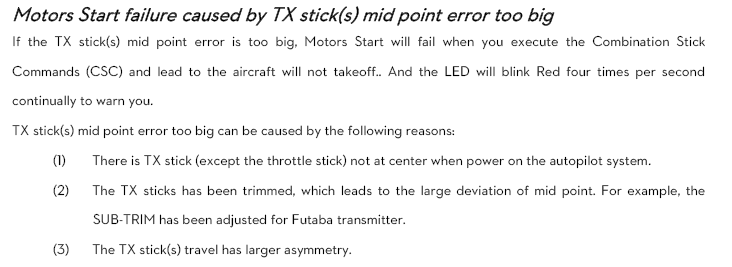
Взято из официальной документации на Назу, крайняя страница, с официального сайта DJI.
Я и сам пришел к тому, что не триммирую вертолеты по крену и тангажу, а регулирую тягами.
Вот Вы вертолетами занимаетесь, а вникать не хотите. Ваша фундаментальная ошибка в том что: в вертолете между пилотом и автоматом перекоса нет ничего, а в коптере между пилотом и двигателями есть виртуальный пилот - контроллер с гироскопами и акселями, который и “рулит” платформой.
вот Вы щелкаете что то, но я не увидел переключения в мануал режим к букве М
я не пользуюсь М режимом,поэтому не настраивал,если хочу перейти в режим калибровки перенастраиваю аппу,чтобы ползунок двигался между нужными мне режимами.
повесьте на трехпозиционный
на dx6i 2x позиционные только.
что за скачки X2 выхода-почему ползунок двигается?
это я переключал,другим выключателем,чтобы показать,что сигнал на х2 есть
Неее, держите пруф.
Не хочется продолжать это спор… Но тут разговор про тротл. А в обсуждаемом случае разговор про правый стик.
а в коптере между пилотом и двигателями есть виртуальный пилот - контроллер с гироскопами и акселями, который и “рулит” платформой.
В коптере при отсутствии GPS тоже почти ничего нет между правым стиком и аппаратом (обратите внимание на слово почти). Автопилот только горизонталь держит, а уплывает аппарат в сторону или нет автопилоту неведомо. Вот представим себе, что дует постоянный такой легкий ветерок. Аппарат (без GPS) сносит. Что будете делать? Удерживать правым стиком, отклоняя его. То же самое, как я понимаю, будет происходить, если компенсировать триммерами правого стика. Еще раз, чтобы не было недопонимания: так делать не нужно, лучше устранить причину, чем бороться со следствием и т.д. Но в принципе такое возможно, ИМХО. И вообще, Наза без GPS - это странно.
Что будете делать? Удерживать правым стиком, отклоняя его. То же самое, как я понимаю, будет происходить, если компенсировать триммерами правого стика.
Что будет думать контроллер при повторном взлете?
Что будет думать контроллер при повторном взлете?
Вот он - краеугольный камень…
Ну да ладно. Пусть каждый заблуждается там где блуждает 😉
,если хочу перейти в режим калибровки перенастраиваю аппу,чтобы ползу
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual . Об этом уже писали выше . Из-за отсутствия 3-х позиционника я калибрую так .И не нужно каждый раз влезать в комп , перенастраивать аппу.
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual . Об этом уже писали выше . Из-за отсутствия 3-х позиционника я калибрую так .И не нужно каждый раз влезать в комп , перенастраивать аппу.
в видео отчетливо видно,что режи ГПС НЕ ВКЛЮЧАЕТСЯ ПРОГРАММНО,хоть тысячу раз в секунду переключи!!!перенастроить ниет ничего сложного можно просто реверснуть канал U и ползунок переключится между М и А!!!Вопрос в другом,в ошибке контроллера,которую показывает индикация!Посмотрите видео,которое выложено ранее,а потом советуйте.
В режим калибровки можно войти переключением тумблера из Atti в Atti GPS минуя Manual .
отключите гпс и войдите в калибровку,я посмотрю получится у вас это.
Спасибо, я попробую оба варианта с выкосом и без, как только найду подходящее помещение. Возник такой вопрос, возможно в программе заложен алгоритм для компенсации нессиметричности? К примеру невозможно изготовить 4 полностью идентичных по тяге и мощности двигателя, также и незначительный наклон одного из моторов вызовет постоянный дрейф даже в большом замкнутом помещении. И еще вопрос, хочу впоследствии на базе назы и ее штатных регуляторов сделать коптер большего размера, хороши ли эти регуляторы? И еще, я пробовал тормозить моторы рукой, они потом снова раскручиваются, как в регуляторах с прошивкой simonk. А свист моторов я так понимаю из-за регуляторов?
возможно в программе заложен алгоритм для компенсации нессиметричности?
Это базовая функция всех полетных контроллеров. Можно сделать даже лучи разной длинны, поставить разные винты, сдвинуть аккумулятор от ЦТ = Наза будет удерживать горизонт и компенсировать всё. Конечно до определенного момента - насколько позволит ВМГ (в инто м оторная г руппа).
И еще вопрос, хочу впоследствии на базе назы и ее штатных регуляторов сделать коптер большего размера, хороши ли эти регуляторы?
Зависит от размеров рамы и мощности двигателя.
Читайте Темы в разделе - вникайте в зависимость = “мотор + винт + регулятор / вес”. Иначе тут снова будем повторять прописные и не очень истины 😉
“Свист моторов” может быть и из-за подшипников, и от мелких повреждений на винте.
Евгений, Вы заметили какая тут война мнений?
Еще раз Вам повторю - перестаньте лечить то что не лечится. Ни один контроллер не умеет держать точку без датчиков о местоположении - GPS или ГЛОНАСС. 😉
Это базовая функция всех полетных контроллеров. Можно сделать даже лучи разной длинны, поставить разные винты, сдвинуть аккумулятор от ЦТ = Наза будет удерживать горизонт и компенсировать всё. Конечно до определенного момента - насколько позволит ВМГ (в инто м оторная г руппа).
Зависит от размеров рамы и мощности двигателя.
Читайте Темы в разделе - вникайте в зависимость = “мотор + винт + регулятор / вес”. Иначе тут снова будем повторять прописные и не очень истины 😉
“Свист моторов” может быть и из-за подшипников, и от мелких повреждений на винте.Евгений, Вы заметили какая тут война мнений?
Еще раз Вам повторю - перестаньте лечить то что не лечится. Ни один контроллер не умеет держать точку без датчиков о местоположении - GPS или ГЛОНАСС. 😉
Моторы и рама будут такими, чтобы не превысить ток регуляторов с запасом, я хотел узнать о качестве регуляторов DJI, стоит ли их использовать в будущем, или есть более качественные и недорогие ESC ? А свист проявляется всегда, даже на тесте моторов через программу наза ассистент, вероятно это от того, что регуляторы 400 герцовые
Что будет думать контроллер при повторном взлете?
Ну вот ты елы-палы. Это же был пример о том, что действие тримммера вполне эквивалентно действию стика (только про правый стик говорю, только про правый). Модельная ситуация, так сказать. Разумеется, речь не идет о том, что так надо действовать по жизни (если про ветр речь). Но Вы, кажется, уже согласились, что триммер и стик - это почти одно и то же. Дальше так. Если имеется СИСТЕМАТИЧЕСКИЙ (из-за каких-то проблем с железом) увод в одну сторону в отсутствие ветра и при отсутствии GPS, то это можно попробовать компенсировать триммером правого стика. Хотя лучше, конечно, найти причину увода. Такой причиной, например, может быть установка Назы на плоскости не параллельной плоскости винтов.
увод в одну сторону в отсутствие ветра
IMHO, можно скорректировать переустановкой мотора (ов), изменив угол наклона плоскости винтов в сторону, противоположную стороне увода.
я хотел узнать о качестве регуляторов DJI, стоит ли их использовать в будущем
Выше среднего. Стоит
есть более качественные и недорогие ESC
Есть
А свист проявляется всегда, даже на тесте моторов через программу наза ассистент, вероятно это от того, что регуляторы 400 герцовые
Совсем нет этого. Читайте Темы. Форум чем и хорош - тут собран опыт и эксперименты других людей = реально океан информации. 😉
Есть два пути - 1. Не вникаете, обычно более дорогой путь (купленные компоненты не подходят). 2. Вникаете, более дешевый путь, эффективности больше.
А вообще надо начинать с цели - к чему идете и что хотите получить 😉
IMHO, можно скорректировать переустановкой мотора (ов), изменив угол наклона плоскости винтов в сторону, противоположную стороне увода.
Тогда станет уводить в другую сторону и так до бесконечности!
“нельзя триммировать”
Не то чтобы “нельзя” но работать при этом не будет как надо - это факт. А вообще - страница мануала Назы 17 например
страница мануала Назы 17 например
Вот и я пополнил ряды коптероводов. Взял для начала dji phantom, так сказать, где за меня уже все подумали и сделали. Чтоб не выбрасывать кучу денег по незнанию, как было с самолётами.
Стоит naza-m v2, прошивка 4.02.
Начал тестить RTH.
загоняю на высоту ~10м
включаю RTH
висит секунд 20
потом медленно разворачивается и летит на home не набирая высоту.
чуток перелетел home, возвращается
и медленно медленно, ступеньками начинает спускаться.
Вопрос собственно такой, почему он не набирает 20м, и можно ли увеличить высоту где нибудь до 50м, а то тут деревьев/домов много в регионе.
надо отлетать от себя метров на 10 в сторону хотя бы тогда будет подниматся а находясь в точке взлета ±2-3 метра не поднимается ,для увеличения высоты возвращения можно поднятся на нужную высоту и перещелкиваением тумблера добится фиксации новой точки взлета ,но отчетов по такому способу пока что не писали
надо отлетать от себя метров на 10 в сторону хотя бы тогда будет подниматся а находясь в точке взлета ±2-3 метра не поднимается
Скажу больше, он и не возвращается, если мение 10м улетел. Эту информацию в инструкции видел и тест проводится с учетом этого.
для увеличения высоты возвращения можно поднятся на нужную высоту и перещелкиваением тумблера добится фиксации новой точки взлета ,но отчетов по такому способу пока что не писали
Ну не полезу же я на крышу многоэтажки для фиксации точки старта. А потом лезь и забирай его оттуда, помимо высоты, он ещё и координаты пофиксит “там наверху”
Скажу больше, он и не возвращается, если мение 10м улетел. Эту информацию в инструкции видел и тест проводится с учетом этого.
Ну не полезу же я на крышу многоэтажки для фиксации точки старта. А потом лезь и забирай его оттуда, помимо высоты, он ещё и координаты пофиксит “там наверху”
Он пофиксит только высоту
не надо с коптером лезть на высоту надо просто что бы он взлетел на нужную высоту и после этого фиксить точку возврата