CRIUS ALL IN ONE PRO Flight Controller

Кто ж этих китайцев знает, написано “Assembled frame,ready to fly,only takes you 2 minutes to assemble your own battery and receiver”, значит вероятно прошивка уже залита, но гарантий нет.
Да и раскомментировать нужные строчки - дело 5 минут, ничего сложного в этом нет.
Это в период томительного ожидания посылки мысли в голову приходят разные, под влиянием форумов 😃. То есть не рекомендуете со стоковыми настройками сразу в поля, а в любом случае подключить и проверить, что там братья установили? Не нашел, к сожалению, владельцев такой же техники на этом форуме.
у меня сейчас так и настроен FS через память каналов frsky приемника… при срабатывании FS, приемник врубает алтьхолд + заданое положение стика на снижение с вертикальной скоростью -60см/с…
Вот только движки не гасятся. Я также настроил на FrSky приемнике. Когда тестировал - коптер опускается на пол и за счет подушки начинает подпрыгивать, пока аппу не увидит, либо пока аккумулятор не сядет.
То есть не рекомендуете со стоковыми настройками сразу в поля, а в любом случае подключить и проверить, что там братья установили? Не нашел, к сожалению, владельцев такой же техники на этом форуме.
А в чем отличие? Плата AIO такая же, проблем не будет.
Подключить к компу и проверить хотя бы правильность каналов приемника все равно нужно, вслепую настраивать нет смысла.
Вот только движки не гасятся. Я также настроил на FrSky приемнике. Когда тестировал - коптер опускается на пол и за счет подушки начинает подпрыгивать, пока аппу не увидит, либо пока аккумулятор не сядет.
с большего (до 80-90%), прыжки по баро гасятся акселем… по сравнению с тем что было, можно считать, что он не прыгает 😃
по крайней мере у меня переворотов небыло… после приземеления, 2-4 мелких прыжка с затуханием амплитуды… где цель FS - это не убить коптер, а не сделать идеальную автопосадку с отключением движков… а пока такой задачи нет…
Это в период томительного ожидания посылки мысли в голову приходят разные, под влиянием форумов 😃. То есть не рекомендуете со стоковыми настройками сразу в поля, а в любом случае подключить и проверить, что там братья установили? Не нашел, к сожалению, владельцев такой же техники на этом форуме.
Видел отзывы о таких комплектах. С ходу ссылки и не найду. Комплекты нормальные, НО!!! Надо в обязательном порядке всё разбирать на составляющие и снова собирать, на этот раз как надо. По отзывам там куча косяков, в плоть до КЗ. Каналы воткнуты от балды, никакой логики, направление вращения моторов не имеет никакого отношения к нужному. И тд и тп. Во имя безопасности- разбирать и пересобирать.
Предполетная подготовка - дело святое. Так и поступлю.
Для тех, кто боится оторвать разьем от платы, есть красивое и простое решение
Mini USB to Micro USB Adapter

с такой приблудой думаю оторвется еще быстрее, лучше пропаять
дело не в мини/микро
Я вот не думаю, и у меня не отрывается. (Может не надо много думать?)
Там нечего пропаивать. Отрывается с дорожками.
Дело именно в мини. Он вставляется в два раза легче.
Если приклеить термоклеем то не оторвется, и думать не надо.
Самое правильное решение - воткнуть Bluetooth и забыть о USB.
Я вот не думаю, и у меня не отрывается. (Может не надо много думать?)
Там нечего пропаивать. Отрывается с дорожками.
Дело именно в мини. Он вставляется в два раза легче.
у меня в.1 как раз с проблемным разъемом, если аккуратно все делать - не отваливается, а если будет торчать в нем такая приблуда, то ее нечаянно задеть и выломать шансов больше:) или я не понял как ею пользоваться:)
Самое правильное решение - воткнуть Bluetooth и забыть о USB.
А прошиваться как? Если б можно было бы хотя бы по телеметрии скетчи заливать вот это было б здорово.
Граждане, немого отстал от темы, может уже где и обсуждалось. Ситуация такова, есть AIOP и MAVLink-OSD. На AIOP стоит прошивка RC2 от Маховика (СПАСИБО САШЕ ОГРОМНОЕ). Так вот на сколько я понял MAVLink протокол сделан под ArduPilot и с Мультивием не особо общается. Может кто-то как-то их уже подружил и получил работоспособный конфиг?
с Мультивием не особо общается
а ну так вы про minimOSD 😃 сейчас уже и под арду и под вий полноценная поддержка есть…
вам сюда:
code.google.com/p/rush-osd-development/…/list
code.google.com/p/…/MinimOSD_Basic_Setup
но работает полноценно вроде как с 2.2 вием…
но работает полноценно вроде как с 2.2 вием…
Саша, спасибо огромное за наводку. Попробую на RC2 твоей запустить её.
Можно ли с помощью этой платы каким-то образом задавать движение квадрокоптера не имея GPS? т.е нужно попасть из одной точки в другую. Я так понимаю, что этой можно сделать, ориентируясь на время.
Мне еще тут утверждают, что это можно реализовать использую встроенный HMC5883L 3-осевой цифровой магнитометр, ориентируясь только по магнитному полю…Возможно?
Попробую на RC2 твоей запустить её.
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
скоро думаю update на 2.2_RC3 будет 😉 как обычно почти все готово, кроме описания… аксель+гпс с большего дописал тоже, но пока не получается хорошо настроить да и погоды толком небыло… потому если релиз и будет скоро, то аксель+гпс фишка скорее всего как экспериментальная выйдет, т.е. на попробовать…
Можно ли с помощью этой платы каким-то образом задавать движение квадрокоптера не имея GPS? т.е нужно попасть из одной точки в другую. Я так понимаю, что этой можно сделать, ориентируясь на время. Мне еще тут утверждают, что это можно реализовать использую встроенный HMC5883L 3-осевой цифровой магнитометр, ориентируясь только по магнитному полю…Возможно?
оффтоп… почитайте про принципы инерциальных систем навигации… если коротко, то на мемс сенсорах без корректора аля гпс это невозможно…
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
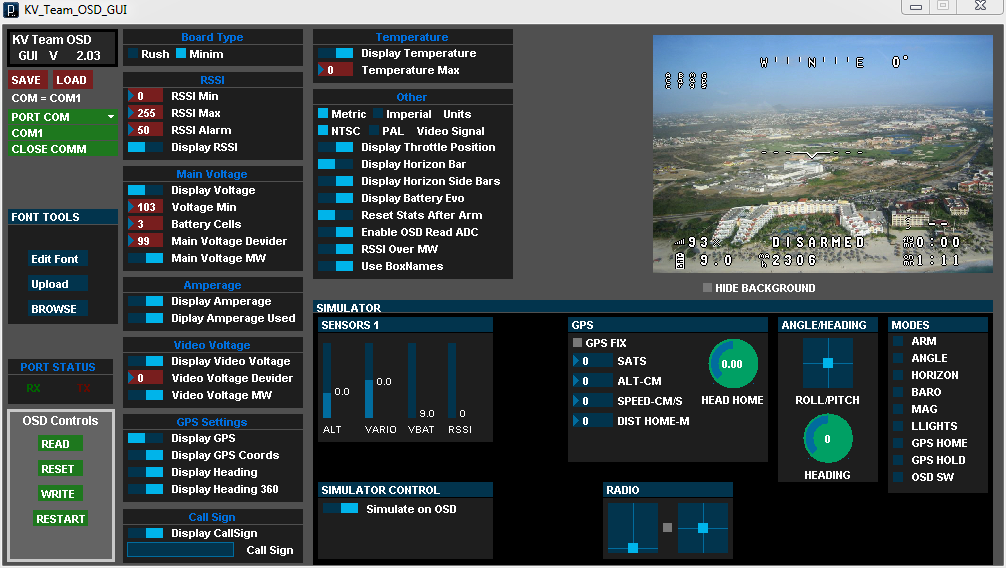
Результат таков. Видно, что данные идут, но во первых какая-то дикая проблема с выводом(кодировкой), во вторых не все данные отображаются. В общем картина вот такая.
во первых какая-то дикая проблема с выводом(кодировкой)
шрифт залейте! там в гуи кнопка есть… 😉
слевa Font Tools -> Upload