CRIUS ALL IN ONE PRO Flight Controller

воооот… именно об этом я и говорю)
Если SPI, то только через какой-нибудь конвертер, типа второй ардуины нано и простейшей программки.
вопрос - а нахрена ее использовать при мизерной дальности? комплект 3ДР с ХК + блютуз самое оптимальное решение, и по деньгам и без геммороя, и на компе и на телефоне…
но что то так нигде и не увидел как работать с выводами А0…А5 для светодиодов
а в чем сложность? определил пин как выход, дефайн для удобства вкл/выкл сделал и пользуйся в свое удовольствие. в def.h отлично все видно как нужно делать.
вопрос - а нахрена ее использовать при мизерной дальности
да просто есть таких 2 модуля) на квадрике стоит блютуз и АРС220 уже) думал просто приаттачить и потестировать такой модуль
а в чем сложность? определил пин как выход, дефайн для удобства вкл/выкл сделал и пользуйся в свое удовольствие. в def.h отлично все видно как нужно делать.
Сложность в том, что у нас несколько алгоритмов мигания, и контроль напряжения меняющий эти алгоритмы.
Сложность в том, что у нас несколько алгоритмов мигания, и контроль напряжения меняющий эти алгоритмы.
не вижу никакой проблемы, как организация всего этого в коде вия, так и внешней платкой
а в чем сложность? определил пин как выход, дефайн для удобства вкл/выкл сделал и пользуйся в свое удовольствие. в def.h отлично все видно как нужно делать.
видать не всем видно 😦, как продублировать штатные светики АВС, бо под крышкой не видно, хочу наружу вывести.
блин это вообще банально:
/************************** all the Mega types ***********************************/
#if defined(MEGA)
#define LEDPIN_PINMODE pinMode (13, OUTPUT);pinMode (30, OUTPUT);
#define LEDPIN_TOGGLE PINB |= (1<<7); PINC |= (1<<7);
#define LEDPIN_ON PORTB |= (1<<7); PORTC |= (1<<7);
#define LEDPIN_OFF PORTB &= ~(1<<7);PORTC &= ~(1<<7);
#define POWERPIN_PINMODE pinMode (37, OUTPUT);
#define POWERPIN_ON PORTC |= 1<<0;
#define POWERPIN_OFF PORTC &= ~(1<<0);
#define STABLEPIN_PINMODE pinMode (31, OUTPUT);
#define STABLEPIN_ON PORTC |= 1<<6;
#define STABLEPIN_OFF PORTC &= ~(1<<6);
после каждой строчки дублируем ее на нужную ногу и все.
собственно тут как раз уже есть дубляж ледпина на 2 ноги - 13-ю и 30-ю, делаем по подобию
Во время проверок когда начинает глючить, посмотри тестером напряжение на контроллере! Скорее всего в этом дело! Про это везде писали. Главное подать чуть больше, и с платы вообще не брать ни куда питание. Просаживается!
Померил - 5.01 в, должно хватать, разве нет?
Померил - 5.01 в, должно хватать, разве нет?
Это когда что у тебя включено? Или просто, только плата? 5.01 Должно вполне, ниже 4.6 не желательно опускать! А оно может при увеличении нагрузки!
Померил - 5.01 в, должно хватать, разве нет?
Моя плата при таком напряжении глючит, стартует через раз. Гарантированно исправно работает при подаче питания 5.18 - 5.20
Этот вопрос обсуждался и на зарубежных форумах, и на этом, коллективный разум пришел к выводу, что надо питать напряжением порядка 5.12 - 5.20 особенно если от этого же источника запитывается что-то еще. Вопрос решается включением диода в разрыв “земляного” вывода стабилизатора BEC, если исходного вольтажа не хватает. Мой четырехканальный регуль Скайуокер выдает вообще 5.6 без нагрузки, и это нормально. Даже продавец в описании особо отмечает повышенное напряжение стаба специально для питания мозгов с допнагрузкой.
Моя плата при таком напряжении глючит, стартует через раз. Гарантированно исправно работает при подаче питания 5.18 - 5.20
Этот вопрос обсуждался и на зарубежных форумах, и на этом, коллективный разум пришел к выводу, что надо питать напряжением порядка 5.12 - 5.20
Сейчас разговор не о том каким питать плату, а какое на контроллере который на плате!
Коллеги!
А кто-нить подключал к сабжу буззер, который идет в комплекте с KK2.0 (этой - banned link
Прокатит?
Коллеги!
А кто-нить подключал к сабжу буззер, который идет в комплекте с KK2.0 (этой - banned link
Прокатит?
А зачем? В прошивках mpng/mwii, ИМХО, не предусмотрена пищаль эта.
Моя плата при таком напряжении глючит, стартует через раз. Гарантированно исправно работает при подаче питания 5.18 - 5.20
Этот вопрос обсуждался и на зарубежных форумах, и на этом, коллективный разум пришел к выводу, что надо питать напряжением порядка 5.12 - 5.20 особенно если от этого же источника запитывается что-то еще. Вопрос решается включением диода в разрыв “земляного” вывода стабилизатора BEC, если исходного вольтажа не хватает. Мой четырехканальный регуль Скайуокер выдает вообще 5.6 без нагрузки, и это нормально. Даже продавец в описании особо отмечает повышенное напряжение стаба специально для питания мозгов с допнагрузкой.
Расскажите поподробнее пожалуйста, у меня плата питается от 4-х регуляторов, можно ли как - то с помощью них запитать плату 5,12-5,20 в, а то не хочется ждать еще месяц, чтобы пришел ubec.
По конфигу и описаниям прошивки Маховика предусмотрен буззер. Просто есть неприкаянный от KK2. Вот и подумал, может его заюзать)
ссылка на parkflyer не открывается…
по базерам вот rcopen.com/forum/f123/topic283798/2095 … но его надо располагать мин 15-20 см от компаса, как практика показала…
В прошивках mpng/mwii, ИМХО, не предусмотрена пищаль эта.
баззер вием сто лет уже поддерживается! всегда удивлялся 100%-м заявлениям без знания дела…
Александр! я эти ссылки внимательно просмотрел. Просто валяется без дела от того контроллера. Но по ссылке моей все равно инфы ноль про него. Буду пробовать на свой страх)))
Это когда что у тебя включено? Или просто, только плата? 5.01 Должно вполне, ниже 4.6 не желательно опускать! А оно может при увеличении нагрузки!
просто плата и приемник… она не армится, поэтому такой вопрос возник (армится только после подключения к компьютеру, причем после отключения - все нормально работает)
Буду пробовать на свой страх)))
не спешите! подайте на свой баззер 5в и померяйте ток. Если близко к 50ма или больше, то не в коем случае к контроллеру не подключать…
п.с. при подключении активного базера к питанию, будет пищать заданным тоном, а вот если не активный, то будет всего лишь щелчек в момент подключения и ток если память не изменяет гораздо больше 50ма!
Александр! Спасибо за примечание о компасе. Только добился его отличной работы. не хочется испортить)))) а буззер на другой платке попробую))) которая полноценную прошивку не могла вместить)
Понял. Спасибо. Железо умное пищалкой убивать не буду)
Вопрос по PID_ам
Приветствую !
В какую сторону смотреть ?
Есть старая и проверенная рама квадро-Х, моторы от ТМот 740КВ, пропы 12х3.8, межосевое (по диагонали) чуть больше 80см.
Всё отбалансировано, вибрации по минимуму, поставил на это железо CRIUS AIOP v2.0 + MegapirateNG 2.8R3.
Плата контроллера стоит (пока?) без виброразвязки.
С PIDами по умолчанию аппарат довольно энергично “бросало” из стороны в сторону:
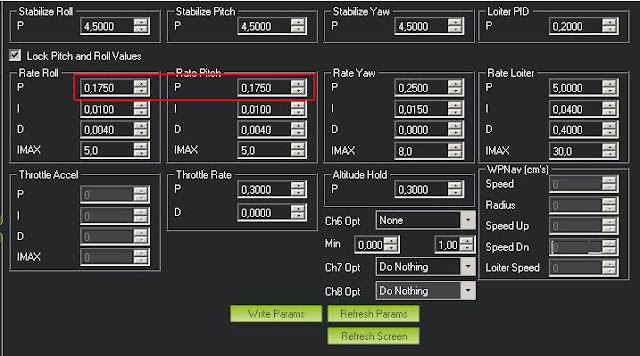
После грубой подгонки Rate Roll/Pitch (c 0.175 до 0.04) аппарат стал почти адекватен, смущает только что отзыв на стики происходит в совсем крайних положениях оных.

То есть я не могу удерживать аппарат в висении, работая стиками “на упреждение” при первичных “кивках” по ветру. Машинка отзывается когда стики двигаются уже в почти крайние положения, естественно, при этом еле заметный первичный “кивок”, переходит уже в довольно энергичное перемещение.
До этого на этой раме стоял кролик, и висение отрабатывалось “на рефлексах” - малейшие колебания рамы/лучей парировались пальцами в маленьком диапазоне у центра.
Но кролик иногда (и довольно непредсказуемо) показывал свою мартовскую прыть 😃
Поэтому и был перекинут на дешёвую фабричную раму, просто для “побаловаться”.
Спасибо за отзывы/советы.
З.Ы.
чтение кучи инфо естественно в процессе, но хочется быстрее “зацепиться” за нужное, а то лето уже вот-вот… (а успеть хочется многого).