CRIUS ALL IN ONE PRO Flight Controller

Буду пробовать на свой страх)))
не спешите! подайте на свой баззер 5в и померяйте ток. Если близко к 50ма или больше, то не в коем случае к контроллеру не подключать…
п.с. при подключении активного базера к питанию, будет пищать заданным тоном, а вот если не активный, то будет всего лишь щелчек в момент подключения и ток если память не изменяет гораздо больше 50ма!
Александр! Спасибо за примечание о компасе. Только добился его отличной работы. не хочется испортить)))) а буззер на другой платке попробую))) которая полноценную прошивку не могла вместить)
Понял. Спасибо. Железо умное пищалкой убивать не буду)
Вопрос по PID_ам
Приветствую !
В какую сторону смотреть ?
Есть старая и проверенная рама квадро-Х, моторы от ТМот 740КВ, пропы 12х3.8, межосевое (по диагонали) чуть больше 80см.
Всё отбалансировано, вибрации по минимуму, поставил на это железо CRIUS AIOP v2.0 + MegapirateNG 2.8R3.
Плата контроллера стоит (пока?) без виброразвязки.
С PIDами по умолчанию аппарат довольно энергично “бросало” из стороны в сторону:
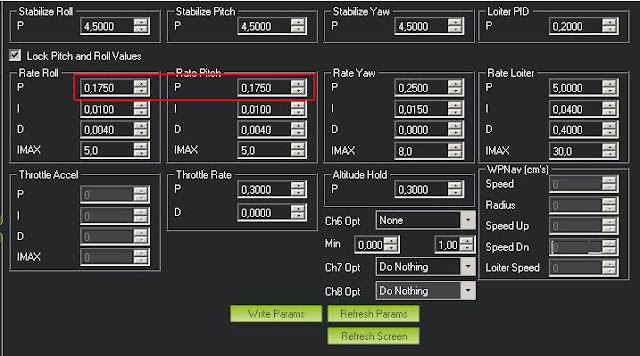
После грубой подгонки Rate Roll/Pitch (c 0.175 до 0.04) аппарат стал почти адекватен, смущает только что отзыв на стики происходит в совсем крайних положениях оных.

То есть я не могу удерживать аппарат в висении, работая стиками “на упреждение” при первичных “кивках” по ветру. Машинка отзывается когда стики двигаются уже в почти крайние положения, естественно, при этом еле заметный первичный “кивок”, переходит уже в довольно энергичное перемещение.
До этого на этой раме стоял кролик, и висение отрабатывалось “на рефлексах” - малейшие колебания рамы/лучей парировались пальцами в маленьком диапазоне у центра.
Но кролик иногда (и довольно непредсказуемо) показывал свою мартовскую прыть 😃
Поэтому и был перекинут на дешёвую фабричную раму, просто для “побаловаться”.
Спасибо за отзывы/советы.
З.Ы.
чтение кучи инфо естественно в процессе, но хочется быстрее “зацепиться” за нужное, а то лето уже вот-вот… (а успеть хочется многого).
Коллеги!
Хочу поделиться очередной своей радостью))
Не удержался. Не дожидаясь уличных тестов опробовал режим АХ дома. И был просто поражен. Держит, Да ЕЩЕ как держит!!! Плавает в пределах 20 см по высоте. И это в условиях небольшой комнаты и помех от шести пропеллеров самой гексы. На баро датчике простейший кусочек поролона от губки для мытья посуды.
Прошивка Маховика RC3.1. Все пиды из коробки. При этом был еще включен уже любимый режим HEADFREE.
Александр, спасибо Вам!
Заранее прошу прощения за то что пишу не про сабжевую плату. Сегодня в очередной раз полетал на плате Crius SE 0.2, впервые с тремя регулями рцтаймер 30А и одном мультистар 30А, все регули прошиты вии-есц. Летал на mahowii RC3.1. При первом тестовом взлете, естественно после калибровки регов и акселя, заметно тянуло на сторону мультистара, но после триммирования акселя стал ровно взлетать, маховии отлично справилась с этим. На улице отлетал 2 акка в живеньком темпе, учитывая что пилот из меня никудышный. Летал без поролона на баро (забыл) а так же без жпс и компаса (мозги стоят среди пучка силовых проводов). Прошивкой доволен на 100%. Написал это к тому, что прошивка выжимает даже из такой платы в таких условиях отличную комфортность и управляемость.
Еще раз прошу извинить за оффтоп.
Сергей!
А на Crius SE какой проц? и памяти? RC3.1 без усечений залилась? Тоже прошу прощения за офф…
Есть мозги попроще сабжа, поэтому интересно.
328 мега, прошивка лезет без жпс или с жпс по I2C, но без инерциалки в жпс функционале.
по базерам вот ALL IN ONE PRO Flight Controller v1.0 … но его надо располагать мин 15-20 см от компаса, как практика показала…
Точно! вчера сам к этой мысли пришел, а то калибровать компас просто утомился 😃
Кстатии прошивка 3.1 ОГОНЬ!
Замечу, что даже установленная плата под крышкой от судочка для еды без поролона вела себя неадекватно. прилепленый на скору руку кусок поролона - все стало на свои места. Аппарат летает, теперь можно заняться видеотрактом…
Crius SE 0.2
вы наверное про 2.0 говорили? hobbyking.com/…/__27108__multiwii_se_v2_0_flight_c…
какая тогда примерная точность удержания высоты на BMP085? ведь у него по паспорту точность почти в 10 раз хуже в сравнении с ms5611… но аксель все равно должен гладить неплохо по идее…
328 мега, прошивка лезет без жпс или с жпс по I2C, но без инерциалки в жпс функционале.
Да. ПРобовал по совету Александра. Но с полетами никак не получилось… Пока сабж не приобрел… Наверное надо было больше настойчивости проявить)
Как уже писал ранее, прошивка ориентирована на AIOP контроллер, что бы не распыляться и сэкономить кучу времени. Соот-но многие фильтры и настройки адаптированы именно под него, но как практика показывает, некоторые пользователи успешно летают и на старых криусах и подобных…
А я уже с нетерпением жду своих тестов в поле - режимы GPS дома никак… Максимум 5 ловит мой NEO-6M. Надежда на хорошую погоду в выходные.
вы наверное про 2.0 говорили?
Нет, про эту.
какая тогда примерная точность удержания высоты на BMP085?
Спецом не засекал в этот раз, так секунд 10 посмотрел, примерно метр гулял, может и больше было бы если подольше понаблюдать, был легкий ветерок и мозги стояли открытые, без защиты и поролона. Если завтра погода позволит могу подольше понаблюдать.
Как уже писал ранее, прошивка ориентирована на AIOP контроллер, что бы не распыляться и сэкономить кучу времени. Соот-но многие фильтры и настройки адаптированы именно под него, но как практика показывает, некоторые пользователи успешно летают и на старых криусах и подобных…
Да, я в курсе этого, лежат 2 платы AIOP v2 с рцтаймера, 1 сильно битая, хоть и рабочая но страшно в небо отпускать, и 1 новенькая, еще не облетанная, ждет новую раму:) А на криусе СЕ я даже забыл в этот раз заменить imu.ino и пиды стоковые.
Понял. Спасибо. Железо умное пищалкой убивать не буду)
Можно и не убивать… Один транзистор общего назначения и один резистор - дадут эмиттерный повторитель. И нет вопросов. По размеру - будет как утолщение на кабеле затянутое усадкой… И всё…
А на криусе СЕ я даже забыл в этот раз заменить imu.ino и пиды стоковые.
и хорошо что забыли… это уже давно делать не надо… там при выборе типа платы (либо баро-сенсора) все автоматом конфигурится… на BMP085 фильтр “потуже”, а пиды поменьше…
Спецом не засекал в этот раз, так секунд 10 посмотрел, примерно метр гулял, может и больше было бы если подольше понаблюдать, был легкий ветерок и мозги стояли открытые, без защиты и поролона. Если завтра погода позволит могу подольше понаблюдать.
можно пробовать ALT пиды покрутить/поднять… сейчас на bmp085 будут на ~30% меньше по дефолту…
#ifdef MS561101BA
conf.P8[PIDALT] = 70; conf.I8[PIDALT] = 20; conf.D8[PIDALT] = 35;
#else
conf.P8[PIDALT] = 40; conf.I8[PIDALT] = 10; conf.D8[PIDALT] = 25;
#endif
Столкнулся с такой проблемой: на стоковой MultiWii 2.2 при одновременном включении режимов HORIZON и HEADFREE спокойно и предсказуемо летается в тихую погоду. Но если налетают порывы ветра, то квадрик начинает хаотично рыскать по Yaw +/- 10 градусов. Приходится постоянно ловить его стиком. При этом порывы по крену компенсируются мгновенно и ровно.
Если включить только HORIZON или только HEADFREE, то рысканий нет. Влияние магнитометра исключается, т.к. если включить чекбокс магнитометра и режим HORIZON, то Yaw держится, как прибитый при любых порывах. Разве что, слегка уплывает вправо в момент взлета, это нормально.
Соответственно, если включить только HEADFREE, то проблем тоже нет.
Влияние вибрации я бы исключил, т.к. рысканье проявляется только при одновременном включении двух упомянутых режимов и только при боковых порывах ветра. Вероятно, это особенность прошивки, которая проявляется особенно заметно только при определенной конфигурации железа?
Здравствуйте.
Я новичок в коптерах.
Комплектующие скоро уже будут у меня (прошли таможню).
Подскажите какие темы еще нужно изучить, кроме данной, чтобы я мог совладать с AIOP (подключить, настроить, какой софт и т. д.).
Спасибо.
Подскажите какие темы еще нужно изучить, кроме данной, чтобы я мог совладать с AIO
rcopen.com/forum/f123/topic221574
и эти не помешают
rcopen.com/forum/f134/topic224135
rcopen.com/forum/f123/topic226087
Рекомендую это. Спасибо автору. Мне в свое время этот ФАК очень помог.
Самое главное забыли - rcopen.com/forum/f134/topic264540, ну и rcopen.com/forum/f123/topic297611
Просмотрщик логов (есть что удобнее чем “встроенный” в MP ?)
Приветствую !
Ловлю остатки вибраций на раме, для этого пишется лог (через Def+IMU), но искать потом в многомегабайтном логе нужные строчки тяжко (фильтра для поиска не нашёл, сортировки в таблице также не нашёл).
М.б. есть что внешнее, поудобнее ?
Спасибо.
З.Ы.
LogView пока задействовать не успел 😃 (нормальный монитор+комп будет доступен вечером).