реги калибровали, назу калибровали? в ассисте при полном газе - наза показывает 950-1000?
при данных выше 500 - наза делает авто взлёт раскрутить должна сама и поднять на какой метр от земли, я так понимаю она его не делает.
На пульте не стоят ли уменьшения экспоненты и т.п. - проверьте по каналам - или создайте новую модель и настройте в ней всё сначала.
Да, в ассистенте пульт успешно откалибровался.
Подскажите кто проверял дистанцию удаления коптера от точки взлета?(выставляемую в ассистенте)что происходит с коптером ?каково его поведение?
расположение GPS выставляется относительно Назы и не в коей мере не от центра тяжести…
Анатолий, написали мануал с тем расчётом, что контроллер вы будете устанавливать как можно ближе к C.G. - это center of gravity(центр тяжести), соответственно от этой точки и идёт отсчёт. Это самый оптимальный вариант. Так же можно располагать контроллер на небольшом удалении от C.G., как написали выше. С точки зрения кинематики и чувствительности датчиков это тоже работоспособно, но КПД системы стабилизации несколько снижается. Коптер будет стараться с одной стороны дотянуть передний край при отрицательном тангаже и опустить задний, но стабилизация по высоте будет стараться наплевать на это и удерживать требуемую высоту. На полётах это как правило практически не отражается, но я бы так извращаться не стал. Считаю, что двигать контроллер можно только по орте вертикальной оси и то не сильно. GPS однозначно привязывается к контроллеру в любом случае. Идеалолёт-это то, что нарисовано на картинке. Идеальное расположение контроллера-на уровне лопастей, но не на уровне C.G.(это теория без частных случаев). Большинство коптеров сконструировано так, что нет особой разницы между C.G. и площадкой установки контроллера, но если чертить теоретические эскизы, то получится куча различных и совершенно неприемлемых вариантов.
Подскажите кто проверял дистанцию удаления коптера от точки взлета?(выставляемую в ассистенте)что происходит с коптером ?каково его поведение?
он просто не летит дольше, по ощущениям упирается как будто в стену.
Эдуард приветствую! И каков результат? Это он сам “тормознул” или Вы его остановили?
День добрый! я в это время вообще пульт на машину поставил и наблюдал за монитором. Сам завис и немного вернулся к границе 2км. Затем уже я взял управление.
Это он сам “тормознул” или Вы его остановили?
Ну дык если обсуждают ограничение дальности назой, к чему было бы это видео - если он остановил его сам? ))) предположу что показана работа контролера .
Что за ограничения назой? вот мой полет на 3200, запас аппы еще был
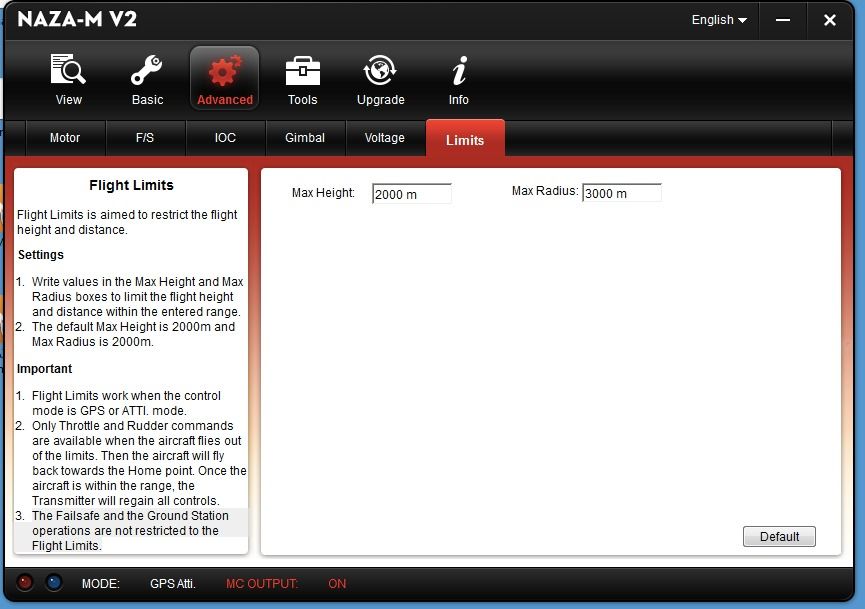
При желании можно установить лимиты в ассисте, например чтоб потом искать коптер в радиусе 2 км (если повезёт, т.к. при перезаписи точки - не понятно что будет) 😁
во первых не надо проводить тесты в н.п.
во вторых это не ограничение назы а банальный разряд акума повлекший отсечку в регулях
ну и в третьих - в таких случаях лучше показывать запись с телеметрией для полноты картины.
отсечку в регулях надо отключать вообще.
вот мой полет на 3200, запас аппы еще был
а какая аппа и какой видеолинк
Я как-то забыл то, что у меня в Назе выставлен потолок 1км и когда поднялся на 1км (3:16мин) не сразу сообразил почему коптер “уперся” и дальше не поднимается;-)