долголеты!

может номинация РАЗ: 2D подвес с GoPro и FPV? - 40минут
Судя по тому, что долголеты так снисходительно вынесены в отдельную полунасмешливую тему (мол, все коптеры - братья, все долголеты - сестры), очень сильно подозреваю, что даже если такой и сделают, то его всеравно помидорами закидают. И угадайте почему…
А кстати, сколько повашему должен будет стоить такой аппарат?
как насчет теории постройки эффективного мультиротора? у нас есть куча материалов по освоению которых вопросы зачастую отпадают. вроде :“как сделать долголет?” в какой угодно номинации…
давайте посмотрим труды Свердлова Сергея (c3c) rcopen.com/blogs/174358 тут есть статья
Эффективность идеального пропеллера
E = Q*D*sqrt(ro/F)
где
Q - коэффициент эффективности (качества) пропеллера, характеризующий его аэродинамическое совершенство;
D - диаметр пропеллера;
ro - плотность воздуха;
F - нагрузка (тяга пропеллера).
то чем мы можем играть это диаметр, коэфициент эффективности и нагрузка.
Чем больше диаметр тем лучше. Чем лучше аэродинамические качества пропеллера тем лучше. Чем меньше нагрузка тем лучше.
Я сделал стенд, который позволяет замерить эффективность пропеллеров и провел кучу тестов rcopen.com/blogs/109830/19757
там же я высказал рекомендации.
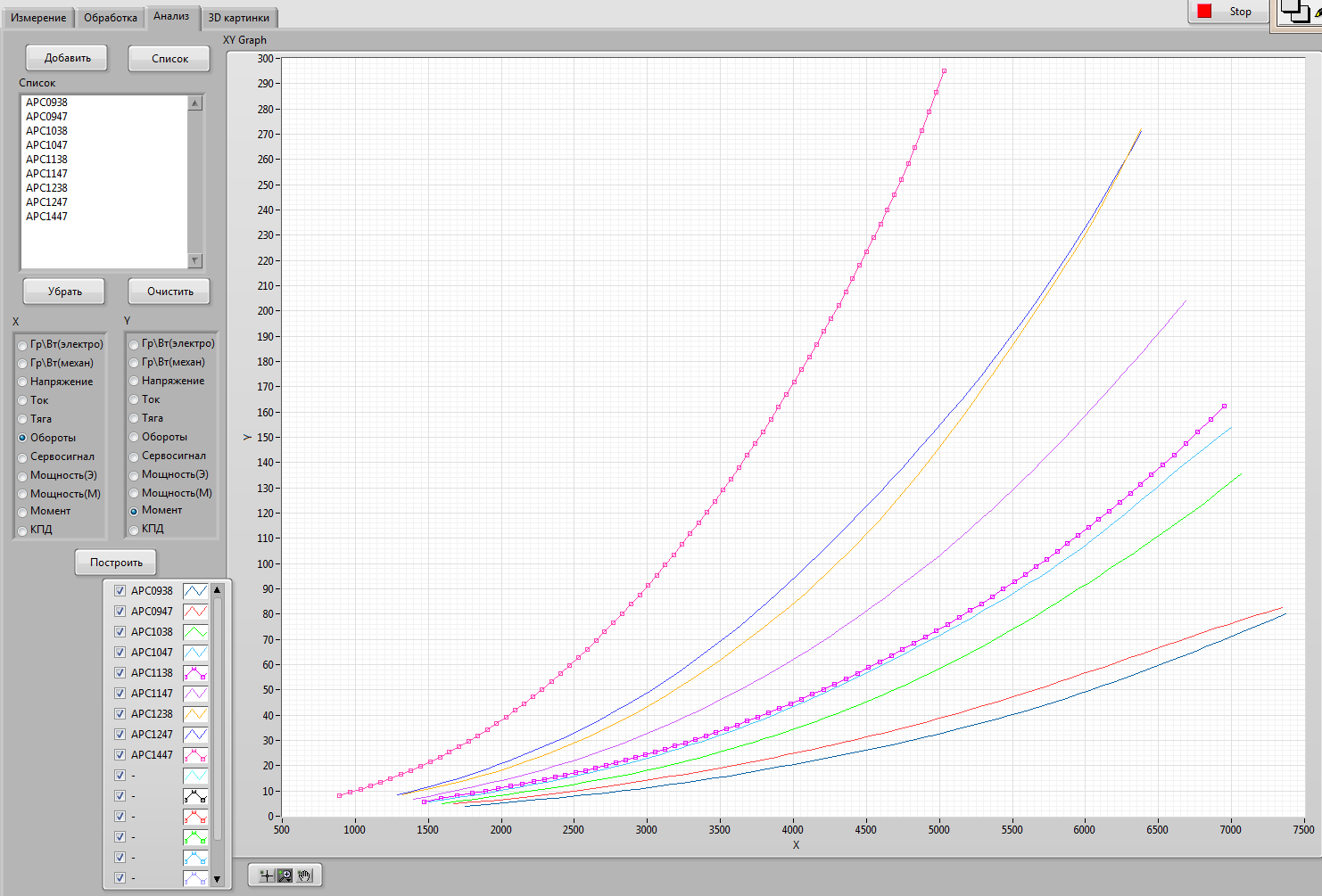
вот как выглядят графики эффективности пропеллеров

Очевидно для долголета надо использовать как можно больший пропеллер с наилучшей эффективности в своем классе (диаметр). И по возможности снижать нагрузку. Таким путем выигрывался конкурс Сикорского
У нас то же самое. Допустим мы хотим построить долголет. То от чего мы должны отталкиваться это пропеллер. Берем максимально большой и эффективный и легкий. Я например использую APC1447 и 1750 с hobbyking. Нам надо их чем то крутить. Подбираем мотор достаточно эффективный и легкий.
Я пишу достаточно эффективный, потому что иногда можно пожертвовать 10% КПД за выигрыш по массе или более оптимальные зоны эффективности.
что это такое? а вот что

цветом показан КПД
Видно что есть зоны в которых мотор\регулятор работают лучше чем в других.
А пропеллер это нагрузка, которая куда либо попадает. Вид такой
В итоге получаем график КПД вида
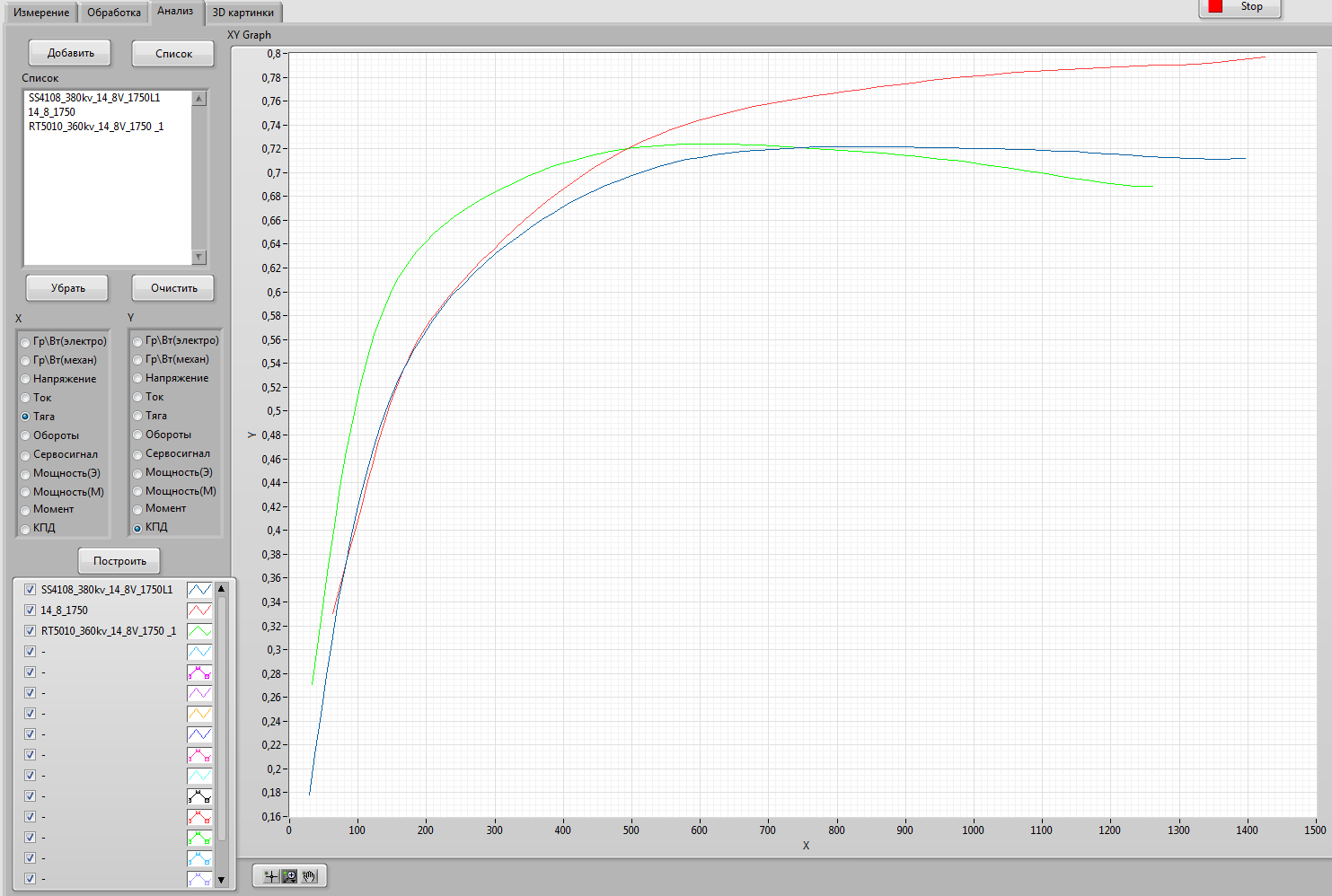
обратите внимание что в зоне нагрузки до 500гр лучше мотор который не выдают максимальный КПД. Учитывая график эффективности пропеллера итоговый график выглядит так

Вот так можно выбрать подходящий мотор с учетом предполагаемых нагрузок. Вопрос с KV стоит просто. Он должен быть как можно ниже что бы можно было повышать напряжение снижая тем самым ток. Что даст возможность сэкономить вес на проводах и регуляторах.
Остается вопрос массы конструкции и массы аккумулятора. С конструкцией все понятно - меньше лучше. Например

трубки 12мм 1мм стенка 700 мм длина каждой (под 17дюймовые пропы). Общая масса 75 гр.
Про выбор массы аккумулятора опять же много написано тут rcopen.com/blogs/174358
Посему мне кажется задача сделать под известную нагрузку долголет (чисто теоретически) не сложной. А вот выбор комплектующих и конструктивных решений, позволяющих сделать эффективный аппарат, куда как сложней. Так как и цена играет роль и размеры получаемых аппаратов и другие ограничения. Поэтому тема долголетов по мне самая интересная.
может номинация РАЗ: 2D подвес с GoPro и FPV? - 40минут
Если уж полезная нагрузка, то пусть она будет на 100% полезной - imho 3Д подвес (и чтобы шасси не затеняли 360) gopro.
И предлагаю вторую номинацию - 40 минут с панасоником GH3/4, к примеру. Текущий коптер исполняющий условия - это devourer x8 с 29" пропами, но понятно что это совсем не бюджетно. Считаю что можно ± “бюджетно” выкрутиться и без 29" пропов.
Квадрик на раме Алексея с 2-мя максаампами 3S 11Ah и 17 винтами с 2д подвесом, прохой и фпв легко вылетает больше 40 минут.
Квадрик на раме Алексея с 2-мя максаампами 3S 11Ah и 17 винтами с 2д подвесом, прохой и фпв легко вылетает больше 40 минут.
Народ обычно так просто на слово не верит, если речь идет о таких впечатляющих показателях, не каждый день такое услышишь или увидишь. Может видео есть этого полета?
А кстати, сколько повашему должен будет стоить такой аппарат?
какой именно аппарат: 2D подвес с GoPro и FPV? - 40минут?
найдите мой конфиг, выкиньте ноги от рамы, замените АКБ на multistar и посчитайте. более чем демократичная самоделка.
P.S. Без всяких MaxAmp, 18650 и T-motor
найдите мой конфиг
Совершенно не могу найти. Может дадите линк? Или видео например?
впечатляющих показателях
Да давно они уже не впечатляющие. MN4010-11 с винтами 17 на 5.5 при 3s потребляет 12.31 г на Вт. При весе 3300 и запасе энергии 244,2 Втч получается 54 минуты. На практике результат на 10% ниже от табличного, итого 48 минут.
Я опять коптер похерил. Только вот если в прошлый раз из-за компаса, он разбился, то теперь с компасом все отлично было, он улетел в неизвестном направлении. Запас хода еще минут 30 был.
Конфиг все знают. Все отлично летало, ровно, без дерганья, идеально висел и держал точку, спутников 12 было. Летал на реке, на переправе, слетал в одну сторону, отснял церквушку, удаление 800 метров. Вернулся обратно. Полетел в другую сторону, решил долететь до берега и обратно. При подлете к берегу наглухо выпало видео, ну выпало и ладно, хотя на самолете с этим же передатчиком на штырь километров с 6-8 ловит, в общем меня это не сильно расстроило, оставил коптер там висеть, решил подъехать к нему. Подъехал - нету.
Просмотр записи и расшифровка последних кадров показало что вместе с видео выпали все спутники, до 0.
Единственное что было сразу не ладно, это полосы по видео, какая то цифровая помеха, до этого полета таких помех на этом коптере не было. Может передатчик сдох, может в линию какую то попал. Все остальное же было хорошо и нареканий не вызывало.
Предположительно коптер пошел по ветру, ветер был 2 м/с, за пол часа это 3,6км пролететь можно. Открытый вопрос как ведет себя коптер без спутников при потере сигнала управления, что он делает?
Пока от коптера осталось только видео:
Да давно они уже не впечатляющие. MN4010-11 с винтами 17 на 5.5 при 3s потребляет 12.31 г на Вт. При весе 3300 и запасе энергии 244,2 Втч получается 54 минуты. На практике результат на 10% ниже от табличного, итого 48 минут.
Так вы это реально отлетали, или все это теоретически?
реально
Все реально уже как год. Я еще ровно год назад отписывал о результате в 61 минуту, тогда вместо гопро с подвесом был мебиус, все остальное оборудование так же было установлено, так что это был полноценный коптер с полезной нагрузкой.
Я не вижу смысла документировать результат до часа висения, т.к. это уже многим под силу, тем более мой конфиг опробовали и другие люди, да и конфиг то в общем не мой, он вроде как Алексея - создателя рамы.
З.Ы. Боюсь коптер найти, т.к. если окажется что ни чего не отвалилось и при включении все будет работать, то летать на нем будет нельзя, т.к. не предсказуемое поведение у моего экземпляра вуконга получается.
З.Ы.Ы. В раму Алексея Pixhawk влезает ? 😃
Открытый вопрос как ведет себя коптер без спутников при потере сигнала управления, что он делает?
При потере спутников должен переключиться в ATTI, а при потере сигнала управления - сесть (но это если ФС настроен), либо будет висеть/дрейфовать до полного вылета батарейки, тогда, в зависимости от веса, либо сядет, либо упадет…
Опять же, многое зависит от приемника… У футабы, например, по умолчанию все каналы установленны в hold, то есть удержание последних принятых состояний (речь о ФС), если Вы ничего там не настраивали, вполне возможно, что коптер продолжал лететь согласно последним командам со стиков…
Я опять коптер похерил. Только вот если в прошлый раз из-за компаса, он разбился, то теперь с компасом все отлично было, он улетел в неизвестном направлении.
Обидно, конечно… а с компасом проблемы это на каком контроллере были?
но это если ФС настроен
имеется ввиду газ в ноль? Или контроллер сам садит если регистрирует потерю? Так то при выключении передатчика ассистент показывал что переключился в ФС
а с компасом проблемы это на каком контроллере были?
С этим же, вуконг. Тогда при полете, по телеметрии начали не корректно отображаться градусы на доворот до дома, затем “замерз” горизонт, коптер перестал слушаться управление и стремительно протаранил лед, рам взорвалась и спасла всю начинку.
опять коптер похерил. Только вот если в прошлый раз из-за компаса, он разбился, то теперь с компасом все отлично было, он улетел в неизвестном направлении. Запас хода еще минут 30 был.
Роман, ну это уже злой рок какой-то. Или те же грабли, только в профиль. Пишите конфиг в тему про “поиск”, там разберем подробно.
Сочувствую, реально *опа.
З.Ы.Ы. В раму Алексея Pixhawk влезает ?
Влезает.
Пишите конфиг в тему про “поиск”
Пока искать грабли не будем. Найду коптер солью логи, там iOSD большая стояла…
Найду коптер солью логи, там iOSD большая стояла…
Так а средства поиска стояли?
Или контроллер сам садит если регистрирует потерю?
Да, должно быть так… Судя по этой страничке…
Да, должно быть так…
Млин, надо было передатчик сразу гасить. Хотя че гасить, я был уверен что он там висит, очень сильно удивился когда его там не обнаружил…
Так а средства поиска стояли?
Неа, я далеко лететь не собирался 😃
Река достаточно оживленная, там местное население постоянно на снегоходах шарахается, рыбу ловят. Развесил у местных объявления, нашедшему 20к рублей, для них это очень большая сумма, так что поиски идут.
Неа, я далеко лететь не собирался
Скажу банальность, но это и есть самая главная ошибка. После первой потери и находки коптера, я решил для себя, что без жпс трекера и маяка я не делаю даже тестовые вылеты. И это на стадионе, в радиусе 50-100 метров от себя. Ну его нафиг.
Знаю одного товарища 😃
Первый тестовый подлет (как он думал).
FS на приемыше не выставлен.
В итоге в метрах 15 потеря управления (антенка в отпала в аппе) и полет в никуда.
Ладно хоть не упал кому на голову.