TBS crossfire r/c system

… Может хотя бы мавлинк у кого-нибудь нормально завёлся?
У меня завёлся на micro TX v1 встроенном в FlySky(бомж полетушки), прошивка 4.10, работает криво, каждый раз при включении нужно в настройках Wi-Fi модуля включать Mavlink On, обещают пофиксить этот момент, посмотрим. Если подключиться ко встроенной в модуль точке доступа, телеметрию на андроид получить не удается, надо чтобы модуль подключился к точке доступа на андроиде, инета в телефоне нет. Далее приложение Mission Planner for INAV ни в какую не хочет подключаться к модулю, подключился только кривым Mission Planner (early access), с виду порт с винды, неудобный ну пока так, хоть какая-то телеметрия.
@qpidon86, спасибо за информацию. Хорошо, что я R9 продать не успел, теперь вместо него кросс в барахолку отправится 😃
Далее приложение Mission Planner for INAV ни в какую не хочет подключаться к модулю
Если ничего не путаю, Mission Planner for INAV поддерживает только протоколы MSP и LTM. Для настройки полётника или создания миссий подойдёт только MSP, т.к. LTM односторонний.
С Mavlink’ом работает порт обычного Mission Planner’а и QGroundControl.
Но если борт под айнавом, телеметрия всё равно будет односторонней, ничего настроить или создать миссию не получится.
Bluetooth с пульта выдаст вам уже содержимое датчиков телеметрии полученное от модуля.
Это жутко неудобно. По сути имеем на выходе недокументированный протокол, состоящий из непонятно каких данных и в непонятно каком формате.
Это жутко неудобно.
Вполне удобно.
имеем на выходе недокументированный протокол, состоящий из непонятно каких данных и в непонятно каком формате.
В каком формате отдает модуль, который у вас стоит, то и получаете. Аппа просто зеркалит то, что приходит.
У меня стоит кросс, по блутусу в аппаратуре отдает на поворотку, а с поворотки по другому блутусу забираю телеметрию на ноут.
Поворотка автоматом распознает кросфайровскую телеметрию (в данном конкретном случае).
Так что все вполне задокументировано и понятно.
Вопросик. Вот я подключил к Матек Ф405 Винг , приёмничек ТБС Кросс нано SE. Там четыре проводка. Два питание, два RX и TX. С первыми всё просто, остальные два подсоединил к свободному Уарту, это Уарт 6. TX к пину RX6 на полётнике, RX к пину TX6. В портах как всё включить правильно, пока затрудняюсь. Сейчас пока вот так всё.
Вопросик. Вот я подключил к Матек Ф405 Винг , приёмничек ТБС Кросс нано SE. Там четыре проводка. Два питание, два RX и TX. С первыми всё просто, остальные два подсоединил к свободному Уарту, это Уарт 6. TX к пину RX6 на полётнике, RX к пину TX6. В портах как всё включить правильно, пока затрудняюсь. Сейчас пока вот так всё.
На порту Uart 6 нужно включить serial Rx
Да, спасибо. Всё порешалось.
Подумываю заказать ещё пару таких же приёмников. Либо на Али, либо там же, у разработчика. От него шло ровно 31 день, “огородами”. С Али если, то путь будет более тщательно отслеживаться наверное? В отличии от пути, каким шёл заказ от с сайта разработчика.
Плюнул, заказал с Али в этот раз. Пока один.
Подскажите пожалуйста, есть ли практические преимущества управления FPV квадом через TBS перед DJI ? Видео точно через DJI FPV очки, а вот над управлением раздумываю между:
- все в одном, тупо DJI air unit c камерой (DJI аппа есть) = ~170 usd
- или заморочиться DJI Caddx Vista + TBS Crossfire divercity nano RX + Micro TX в Таранис = ~270 usd
Но если разница в цене очевидна, то в целесообразности - нет. Кроме бОльшей настраивабельности управления на Таранисе, убедила бы бОльшая стабильность связи, однако в этой же теме вычитал, что наводки TBS как раз таки ловил лучше. А больше инфы никакой не нашел.
Ребят, простите за, возможно тупой вопрос.
Надоело мне ловить рандомные фс на хм+ своем.
Задумался о переходе на кросс.
Но вот в фпв-шном чатике меня пара человек убеждала, что ныне Tracer - лучший выбор.
Кому верить?
Интересует прежде всего стабильность связи - для полета повыше / подальше / погуще в лес и т.д…
ныне Tracer - лучший выбор
На 2Вт летать в даль? Проще наверно кросс взять и на 100мВт летать в даль. Только антенны чуть побольше.
Добрый ночи , подскажите сколько каналов будет по кросу подключения в TBS CROSSFIRE NANO RX, не пойму кто говорит 4 канала кто 8, сколько ???
сколько каналов
если напрямую провода припаять то 4 канала
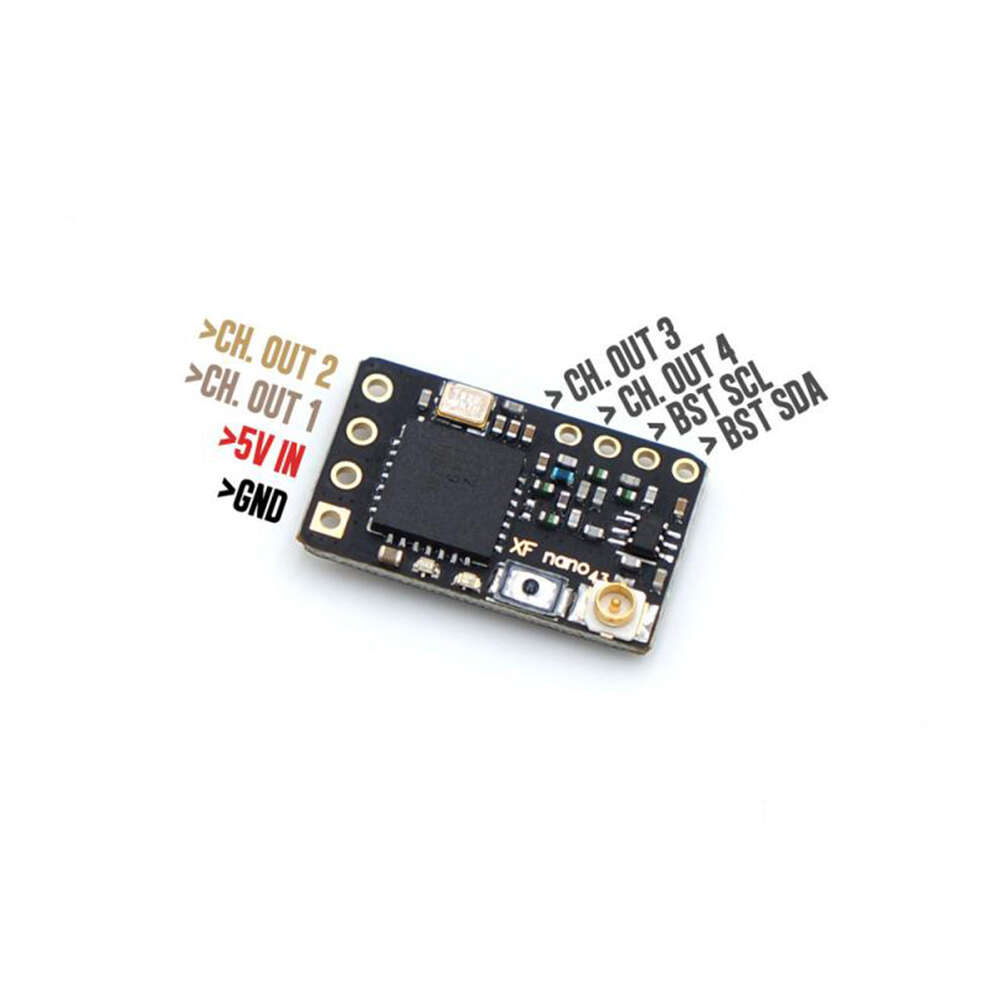
если через адаптер то 6 каналов www.team-blacksheep.com/…/prod:xf_6chpwmadapt
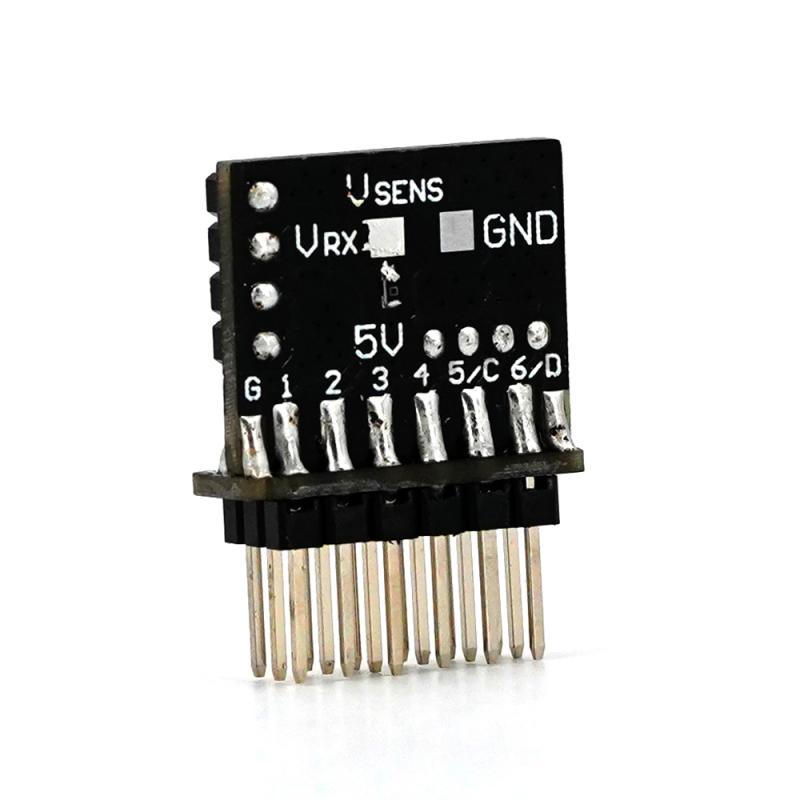
если использовать SBUS - PWM конвертер то 8 или 12 каналов через SBUS/PPM/CRSF (типа такого banggood.com/DIY-SBUS-To-PWM-PPM-Decoder-16CH-For-…)

Спасибо, а если подключить как по инструкции к matek f722se сколько там будет по crsf каналов? Не аналоговых
сколько там будет по crsf каналов?
у меня танго2. там в настройках кросфаира можно выбрать 8 или 12. думаю что и во внешних модулях тоже самое.
На 2Вт летать в даль? Проще наверно кросс взять и на 100мВт летать в даль. Только антенны чуть побольше.
Так на трасере же вроде 25/100 мвт?
У вас будет 8 или 12 каналов.
По поводу 2 ватта, у меня результат по дальности получился хуже, чем на одном ватте. Не знаю почему, но на одном ватте лучше
Так на трасере же вроде 25/100 мвт?
В описании есть 2Вт
Вопрос касается Радиомастера, INAV и TBS вместе взятых, но спрошу тут. На радиомастере установлен тбс микто тх 2 версии. Квадрик на айнав и такая ситуация, заметил что есть задержка как при отключении аккума от квадрика (сообщает что телеметрия потеряна только через 2 секунды) так и при дизарме, пропы останавливаются после щелчка тумблера секунды через 1.5-2. Допустим с этим же модулем тбс и приемником на квадрике с полетником KISS V2 все происходит моментально а на квадрике с айнавом, при посадке щелкнул дизарм, пропы крутятся еще потом зачастую кувырок и потом остановка пропов. Куда копать? И кувырок подозреваю происходит потому, что дизарм не проходит в момент касания квадрика земли.
Вопрос касается Радиомастера, INAV и TBS вместе взятых, но спрошу тут. На радиомастере установлен тбс микто тх 2 версии. Квадрик на айнав и такая ситуация, заметил что есть задержка как при отключении аккума от квадрика (сообщает что телеметрия потеряна только через 2 секунды) так и при дизарме, пропы останавливаются после щелчка тумблера секунды через 1.5-2. Допустим с этим же модулем тбс и приемником на квадрике с полетником KISS V2 все происходит моментально а на квадрике с айнавом, при посадке щелкнул дизарм, пропы крутятся еще потом зачастую кувырок и потом остановка пропов. Куда копать? И кувырок подозреваю происходит потому, что дизарм не проходит в момент касания квадрика земли.
switch_disarm_delay
И это естественно вопрос по INAV(вы же просто представьте себе для понимания - приемник получает содержимое канала на который назначен свитч. Все это он передает по интерфейсу дальше, не обрабатывая и не изменяя.)
Точно, там в разделе Failsafe, Delay for turning off the Motors during Failsafe стоит по умолчанию 200 (1=0.1 сек) итого как раз 2 секунды 😃. Спасибо Виталий! Поставлю 0.5 сек.
Точно, там в разделе Failsafe, Delay for turning off the Motors during Failsafe стоит по умолчанию 200 (1=0.1 сек) итого как раз 2 секунды 😃. Спасибо Виталий! Поставлю 0.5 сек.
Да не за что. Только вы настроили файлсейв а еще есть настройки именно дизарм свитча. Разные вещи.
Это указанную Вами команду надо ввести с CLI? Я пробовал ввести, ничего не получается.
Вру, получилось через set. Там значение 250. Это тоже 1=0.1 сек.?
P.s. Все, прекращаю флудить в этой теме, перемещаюсь в соответствующую ветку. Сори.