Полетные контроллеры Matek Systems

Чтобы иметь подсветку, надо похерить все компасы и барометры?
Вы, когда подключаете флэшку в USB херите все мышки и клавиатуры? ))) У компаса, барометра и 2812 адреса в шине разные…
Вы, когда подключаете флэшку в USB херите все мышки и клавиатуры? ))) У компаса, барометра и 2812 адреса в шине разные…
Я бы не спрашивал, но там также написано, что одно из двух надо запретить. То есть или I2C, или LED.
Хм… Интересно, что они там намудрили… И кто именно… ) Я всегда считал, что управляемые светодиоды как раз и работают в пространстве шины I2C, то есть в шину передается адрес устройства и код RGB, а соответствующий адресу диод начинает светить… Ну и, как бы не только считал, но на ардуине оно так и работает… Это получается что в F4 шина урезанная чтоли? ) Хорошо, что у меня такого нет…(©)
когда подключаете флэшку в USB херите все мышки и клавиатуры?
Я бы сравнил с PCI на материнке - либо туда USB втыкать, либо звуковуху и херить все мышки и клавиатуры. Таки да, у адресных светодиодов свой достаточно дубовый протокол, обрабатываемый микрухой внутри каждого диода и несовместимый с периферией stm. Я как-то запрашивал на гите INAV тупо PWM на выход LED, но всех все устраивает.
управляемые светодиоды как раз и работают в пространстве шины I2C
Нет, у 2812 свой протокол. Типа ШИМ. Он однозначно несовместим с I2C.
у адресных светодиодов свой достаточно дубовый протокол, обрабатываемый микрухой внутри каждого диода
Ладно, а что-нибудь безадресное можно прикрутить? Мне не надо чтоб каждый светодиод отдельно работал, просто было бы неплохо например заставить их моргать в определенных ситуациях.
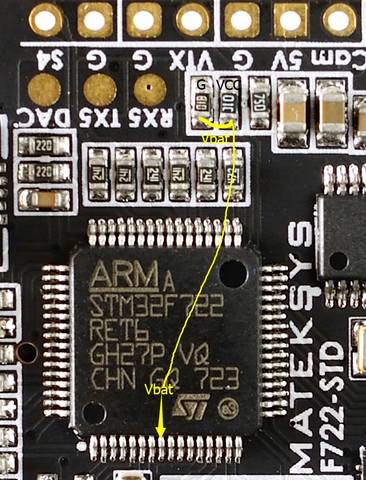
Суппорт Матеке прислали, как раз у меня не звонится vcc с этим сопротивлением, видимо в многослойной плате дорожка сгорела. Кину проводок, либо напрямую к сопротивлению буду паять.
Никак серву не заставлю работать на матеке 405 с выхода s6 ,пробовал разные прошивки и последнюю 1.9.1 с пометкой серва 6 , может в настройках что не указываю или в кли надо издать какой указ-кто делал какие подводные камни встретились и вообще работает серва или нет на матеке 405 цтр и с какой прошивкой?
вообще работает серва или нет на матеке 405 цтр и с какой прошивкой?
у меня работает на S1, на трикоптере. На S6 не пробовал заводить. Инав 1.9.1, таргет Matek F405 обычный. Главное не забыть включить галочку Enable Motor and Servo Output в конфигураторе 😃
Мне для поворота камеры на кваде, галочка Servo Output включена , ну и без Enable Motor коптер не заведется, он летает нормально, дело в том что нечем камеру поворачивать, на приемнике только ррм и все,хочется прокинуть через контроллер… На трикоптере вывод под серву разрабом предусмотрен, а тут вроде сделали тоже на вывод S6 ,но чего то я не докручиваю явно.
На трикоптере вывод под серву разрабом предусмотрен, а тут вроде сделали тоже на вывод S6 ,но чего то я не докручиваю явно.
Ну я попробую перезалить прошивку для S6, только вечером. Сообщу результат.
У меня на двух платах такая песня , на обеих S6 не заводится . Скорее всего надо что-то в кли нарисовать, но пока читаю форумы , не нашел что надо. Если у Вас получится победить эту серву -буду очень благодарен.)
Подскажите, есть возможность подключить SmartAudio от передатчика к F405СTR?
Никак серву не заставлю работать на матеке 405 с выхода s6 ,пробовал разные прошивки и последнюю 1.9.1 с пометкой серва 6 , может в настройках что не указываю или в кли надо издать какой указ-кто делал какие подводные камни встретились и вообще работает серва или нет на матеке 405 цтр и с какой прошивкой?
Работает. Прошивка 1.9.1 MatekF405_ServoS6, из конфигуратора ставится, конфигуратор 1.9.3:
- Configuration - галка Servo gimbal
- Servos - галка на пересечении Servo 0 и канала CH8, например (если у вас крутилка назначена на 8 канал аппы)
То же самое можно через cli: - feature SERVO_TILT
- servo 0 1000 2000 1500 100 8
парни почему на матек стр по яву крутитса коптер на омнибусе такова небыло тока контроллер поменял. на прошывке 1.9 не крутитса а на 1.9.1 крутит. надо крутить пиды тока по яву или осталные тоже могут за это отвечать?
по яву крутитса коптер
в каком режиме полета?
надо крутить пиды тока по яву
вообще да, но в данном случае это борьба с симптомами, а не с причиной.
у квадрокоптера все моторы компенсируют вращение друг друга, поэтому по яву он не должен вращаться сам по себе.
в каком режиме полета?
во всех режимах крутится.пиды в 1.9 и 19.1 такие же.но не вращается. самому заадка
То есть на омнибусе у вас на прошивках 1.9 и 1.9.1 не крутило, а на матеке на 1.9 не крутит, а на 1.9.1 крутит? Без всякого изменения в конструкции коптера?
Сначала полупричины: такое было на аппе футаба-износился резистор на стике ява и “серединка” диапазона немного гуляла в одну сторону .Это первое.Вторая возможна причина не качественные пропы левого и правого вращения , такое было на кваде, очень медленно крутился.Еще как вариант кв моторов проверить на равнозначность.Размагнитить компас . Но это все в том случае,если компас не имеет наводок от силовых проводов ,все проверено , разнесено …То есть другими словами главная причина -компас,от него плясать.
Работает. Прошивка 1.9.1 MatekF405_ServoS6, из конфигуратора ставится, конфигуратор 1.9.3:
- Configuration - галка Servo gimbal
- Servos - галка на пересечении Servo 0 и канала CH8, например (если у вас крутилка назначена на 8 канал аппы)
То же самое можно через cli:- feature SERVO_TILT
- servo 0 1000 2000 1500 100 8
Все заработало, огромное спасибо !
То есть на омнибусе у вас на прошивках 1.9 и 1.9.1 не крутило, а на матеке на 1.9 не крутит, а на 1.9.1 крутит? Без всякого изменения в конструкции коптера?
на омнибусе 1.8 не крутило. потом вся тажа конфигурацыя коптера тока пк поменял. сразу залил 1.9 но там серва не работала летал кагбы хорошо. залил 1.9.1 серва рабтает и крутит его. пропы от фантика 3 оригинал.
кажется раз обрался там литал на ппм тут на сбас.газ в нис у меня значение показевает 1030 гдето так и на осталные стики каой командой в цли это изменить?
Стало быть если на 1.8 летало и не крутилось то однозначно пошивка.
Посмотреть в гуи на приемнике какие цифры стоят, по яву должно быть 1500. Если не так- крутить субтриммеры в аппе , в кли пока лучше не залазить. Еще раз повторюсь- попробовать размагнитить компас, бывает при транспортировке компас может приблизиться к магниту вроде динамика и принамагничивании возможны повороты. Возможно пропустил- какой компас стоит ? Если бн-800-880, то в расположении компаса указать - cw270( вроде так) ))))