Hubsan X4 FPV H501S / Pro

Сфоткал. Какие интересуют?
Все платы коптера, особенности полетного контроллера.
Винты затягиваю и снимаю руками, ключ раз использовал
Недотянутые винты - не слетят, но встать могут с наклоном по “перекосу” резьбы и не сядут основанием плотно на своё место, а тока одним краем.
Будет “бабочка”. А она - зло .
Без фанатизма, но щетаю нужным подтягивать.
Также вскрывал, с целью найти проблему неработающего мотора из коробки. Оказалось разъём плохо воткнули.
Но не фоткал.
Надо полагать, что этот GPS модуль в верхней крыжке находится? На которой позолоченная накладка. Так?
И нет ли фото этого модуля с обратной стороны? Посмотреть, можно ли на плату провода аккуратно подпаять. Решил всё таки маяк внутри корпуса разместить, или разъем с GPS модуля вывести и уже снаружи маяк к нему цеплять. А то, дальний поиск направления, без “Яги”, весьма гиморный, а Ягу муторно делать, да и разъёма под рукой нет для рации.
Да, GPS-модуль вместе с платой компаса расположены внутри верхнего “горба”, за позолоченной накладкой.
Фото с обратной стороны выше выкладывал Алексей, ниже дублирую. На обратной стороне платы только керамическая антенна.
Думаю что маяк от Тигромуха вполне уместится внутри. Надо иметь в виду что в случае серьезного краша квадра и внешнего размещения маяка на корпусе возможен его “отстрел” в сторону, с разрывом соединений с внутренним GPS-модулем, что сделает невозможным поиск по координатам.
Надо только все хорошо скомпоновать, включая антенну маяка.
на 3:45 пара остановок и на 4:05, как раз в это время мне захотелось сесть в машину и в тени, с комфортом, порулить. Тьфу, поштурвалить 😁. Сел и увидел, что скорость квада =0м/с. Развернул в правильном направлении пульт и квад набрал свои 7м/с.
На 5.50 - никакого желе. Появляется при движении. Это вибрация на высоких оборотах+солнечная погода усиливает желе.
И да… Никакие ухищрения по поводу виброизоляции - не помогут. не тратте своё время. Пока камера внутри квадра - это бесполезно.
Никому пока нигде не удалось победить желе. А уменьшить можно тока минимизировав вибрации пропов и моторв.
Народ жаловался, что в режиме “нормаль”, движки не заводятся.
Проверил. Заводятся. На 1.1.17.
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”.
Проверил. Заводятся. На 1.1.17.
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”.
А в чём там выигрыш?
я площадку под квадр уровнем в ноль установил. мож тут подвох?
Нет, не в этом причина. Пульт показывает R и P по нолям.
Народ жаловался, что в режиме “нормаль”, движки не заводятся.
Да, у меня на 1.1.17 не заводятся в normal.
Нет, не в этом причина. Пульт показывает R и P по нолям.
Да, у меня на 1.1.17 не заводятся в normal.
То есть думаете из за того что по нолям р и п из за этого не дает калибровать?
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”. А в чём там выигрыш?
Не развивает большие обороты. Расходники не дают более 60%. А значит, при переходе в альтитюб, летать будет медленней и экономней. Медленней полёт - меньше ошибок в управлении. Но это, как я написал - имхо.
Нет, не в этом причина. Пульт показывает R и P по нолям.
Да, у меня на 1.1.17 не заводятся в normal.
И первое, и второе - вобщем-то ненормально.
Нада штота делать.)
Не развивает большие обороты. Расходники не дают более 60%. А значит, при переходе в альтитюб, летать будет медленней и экономней. Медленней полёт - меньше ошибок в управлении. Но это, как я написал - имхо.
Тады понятно!😃
То есть думаете из за того что по нолям р и п из за этого не дает калибровать?
Думаю, он другое имел ввиду.
Пробуйте ещё раз. Надо стиками мож подрачить подольше ? Тогда войдёт в режим…
Все платы коптера, особенности полетного контроллера.
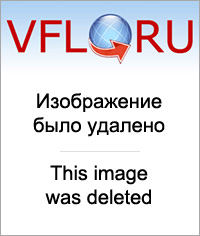
Фото GPS-модуля уже постил выше. Вот остальные железки.
Обратите внимание на крепление мотора. Два диагональных мотора (левый передний и правый задний) имеют угловой выкос по вертикали относительно оси луча - с помощью подложенных шайб под двумя из четырех креплений моторов.
Препарировал на днях свой H501S в целях небольшого улучшайзинга…
Ни хрена себе - “небольшого улучшайзинга”.
Это ради чего же, Вы его так разобрали по составляющим!? Колитесь… Многие же спать не будут! 😃
Позже расскажу, когда закончу 😃
А пока прошу владельцев H501S заглянуть внутрь квадрика через крышку загрузки аккумулятора и посмотреть, у всех верхняя плата снизу имеет такой же вид как у меня на фото?
Или на по краям платы снизу присутствуют продольные блестящие луженые полосы-проводники?
у всех верхняя плата снизу имеет такой же вид как у меня на фото?
У меня такая же.
Приколхозил свою шторку. На фото конечно вид ужаснее, чем в натуре, но зато, встала чётко по контуру экрана и никаких щелей. Держится ооочень хорошо. Доработка заняла минут 10-15. Участвовали: Дреммель с круглым диском, по типу “болгарки”, надфиль плоский, обезжириватель, двух сторонний 3М скотч. Всё по этапу и со всех сторон.
Фото GPS-модуля уже постил выше. Вот остальные железки
Спасибо. А можно разрешением побольше, а то без увеличения мало что разобрать.
Ну если модераторы и другие не прогонят)
Основная плата


Единственный доступный для макро-фотосессии чип (контроллер?) на основной плате

Плата видеозаписи и видеопередатчика



Модуль GPS


Компас


Регулятор


А что там за деталь на GPS модуле, вверху с права? Похожая на батарейку или аккум…
А что там за деталь на GPS модуле, вверху с права? Похожая на батарейку или аккум…
И правда как батарейка, на плате написана BT1 т.е батарея. может типа как на мат платах питание для биоса?
Похоже на ионистр - элемент кратковременного питания для поддержания хранения данных и пр.
если это и в правда батарейка, может она садится и квадрик от этого сума сходит и падает?
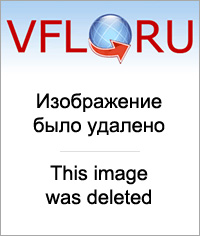
Для тех кто захочет подключиться к бортовому GPS-модулю. Наверное лучше не резать провода от модуля, а использовать имеющиеся контрольные точки на обратной стороне основной платы
