Hubsan X4 FPV H501S / Pro

А кто нить покупал у этого продавца с ибея? www.ebay.com/itm/112024627852 всего $221.89 с бесплатной доставкой в Украину. Как то странно почему дешевле даже чем на банге… или вообще думаю может лучше взять UPair One, который на 50 баксов дороже хабсана, но у него намного все круче…
В Россию не шлет.
всего $221.89 с бесплатной доставкой. Как то странно почему дешевле даже чем на банге…
Ничего странного. Свой брал на алиэкспрессе, за 17500 примерно, прислали из Швеции… через два дня, в одном из магазинов была скидка по акции, аж за 12500 торговали…Пятихатка разницы. И тут, на ебей, походу просто китаец влез…
При запуске компас тумблером “Фалов ми” не проверял. Похоже придётся прибегнуть к такой перепроверке.
Не совсем понял вопрос про камеру… Смотрела по ходу полёта. Направление - юго-восток. 😃
Камера должна при фалов ми смотреть чотка на нас. Это имелось ввиду…
Компас капризный. Не ленитесь проверять. Избежите множества проблемм.
Сфоткал. Какие интересуют?
Все платы коптера, особенности полетного контроллера.
Винты затягиваю и снимаю руками, ключ раз использовал
Недотянутые винты - не слетят, но встать могут с наклоном по “перекосу” резьбы и не сядут основанием плотно на своё место, а тока одним краем.
Будет “бабочка”. А она - зло .
Без фанатизма, но щетаю нужным подтягивать.
Также вскрывал, с целью найти проблему неработающего мотора из коробки. Оказалось разъём плохо воткнули.
Но не фоткал.
Надо полагать, что этот GPS модуль в верхней крыжке находится? На которой позолоченная накладка. Так?
И нет ли фото этого модуля с обратной стороны? Посмотреть, можно ли на плату провода аккуратно подпаять. Решил всё таки маяк внутри корпуса разместить, или разъем с GPS модуля вывести и уже снаружи маяк к нему цеплять. А то, дальний поиск направления, без “Яги”, весьма гиморный, а Ягу муторно делать, да и разъёма под рукой нет для рации.
Да, GPS-модуль вместе с платой компаса расположены внутри верхнего “горба”, за позолоченной накладкой.
Фото с обратной стороны выше выкладывал Алексей, ниже дублирую. На обратной стороне платы только керамическая антенна.
Думаю что маяк от Тигромуха вполне уместится внутри. Надо иметь в виду что в случае серьезного краша квадра и внешнего размещения маяка на корпусе возможен его “отстрел” в сторону, с разрывом соединений с внутренним GPS-модулем, что сделает невозможным поиск по координатам.
Надо только все хорошо скомпоновать, включая антенну маяка.
на 3:45 пара остановок и на 4:05, как раз в это время мне захотелось сесть в машину и в тени, с комфортом, порулить. Тьфу, поштурвалить 😁. Сел и увидел, что скорость квада =0м/с. Развернул в правильном направлении пульт и квад набрал свои 7м/с.
На 5.50 - никакого желе. Появляется при движении. Это вибрация на высоких оборотах+солнечная погода усиливает желе.
И да… Никакие ухищрения по поводу виброизоляции - не помогут. не тратте своё время. Пока камера внутри квадра - это бесполезно.
Никому пока нигде не удалось победить желе. А уменьшить можно тока минимизировав вибрации пропов и моторв.
Народ жаловался, что в режиме “нормаль”, движки не заводятся.
Проверил. Заводятся. На 1.1.17.
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”.
Проверил. Заводятся. На 1.1.17.
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”.
А в чём там выигрыш?
я площадку под квадр уровнем в ноль установил. мож тут подвох?
Нет, не в этом причина. Пульт показывает R и P по нолям.
Народ жаловался, что в режиме “нормаль”, движки не заводятся.
Да, у меня на 1.1.17 не заводятся в normal.
Нет, не в этом причина. Пульт показывает R и P по нолям.
Да, у меня на 1.1.17 не заводятся в normal.
То есть думаете из за того что по нолям р и п из за этого не дает калибровать?
ИМХО - Тем, кто не любит гонки и не летает в сильный ветер, однозначно переводить в “нормаль”. А в чём там выигрыш?
Не развивает большие обороты. Расходники не дают более 60%. А значит, при переходе в альтитюб, летать будет медленней и экономней. Медленней полёт - меньше ошибок в управлении. Но это, как я написал - имхо.
Нет, не в этом причина. Пульт показывает R и P по нолям.
Да, у меня на 1.1.17 не заводятся в normal.
И первое, и второе - вобщем-то ненормально.
Нада штота делать.)
Не развивает большие обороты. Расходники не дают более 60%. А значит, при переходе в альтитюб, летать будет медленней и экономней. Медленней полёт - меньше ошибок в управлении. Но это, как я написал - имхо.
Тады понятно!😃
То есть думаете из за того что по нолям р и п из за этого не дает калибровать?
Думаю, он другое имел ввиду.
Пробуйте ещё раз. Надо стиками мож подрачить подольше ? Тогда войдёт в режим…
Все платы коптера, особенности полетного контроллера.
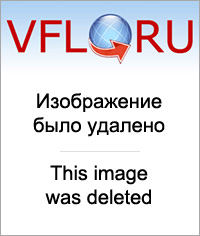
Фото GPS-модуля уже постил выше. Вот остальные железки.
Обратите внимание на крепление мотора. Два диагональных мотора (левый передний и правый задний) имеют угловой выкос по вертикали относительно оси луча - с помощью подложенных шайб под двумя из четырех креплений моторов.
Препарировал на днях свой H501S в целях небольшого улучшайзинга…
Ни хрена себе - “небольшого улучшайзинга”.
Это ради чего же, Вы его так разобрали по составляющим!? Колитесь… Многие же спать не будут! 😃
Позже расскажу, когда закончу 😃
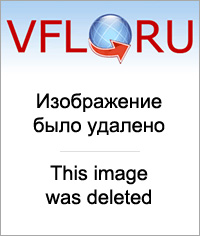
А пока прошу владельцев H501S заглянуть внутрь квадрика через крышку загрузки аккумулятора и посмотреть, у всех верхняя плата снизу имеет такой же вид как у меня на фото?
Или на по краям платы снизу присутствуют продольные блестящие луженые полосы-проводники?
у всех верхняя плата снизу имеет такой же вид как у меня на фото?
У меня такая же.
Приколхозил свою шторку. На фото конечно вид ужаснее, чем в натуре, но зато, встала чётко по контуру экрана и никаких щелей. Держится ооочень хорошо. Доработка заняла минут 10-15. Участвовали: Дреммель с круглым диском, по типу “болгарки”, надфиль плоский, обезжириватель, двух сторонний 3М скотч. Всё по этапу и со всех сторон.
Фото GPS-модуля уже постил выше. Вот остальные железки
Спасибо. А можно разрешением побольше, а то без увеличения мало что разобрать.
Ну если модераторы и другие не прогонят)
Основная плата


Единственный доступный для макро-фотосессии чип (контроллер?) на основной плате

Плата видеозаписи и видеопередатчика



Модуль GPS


Компас


Регулятор


А что там за деталь на GPS модуле, вверху с права? Похожая на батарейку или аккум…