Hubsan X4 FPV H501S - FAQ, инструкции, прошивки, модернизации

fc /b “d:\Documents\Hubsan H501S Firmware\H501S LCD\901A LCD V1.3.2\HRC-F2-LCD.hbs” “d:\Documents\Hubsan H501S Firmware\H501S LCD\901A LCD V1.3.3\HRC-F2-LCD.hbs”
Сравнение файлов D:\DOCUMENTS\HUBSAN H501S FIRMWARE\H501S LCD\901A LCD V1.3.2\HRC-F2-LCD.hbs и D:\DOCUMENTS\HUBSAN H501S FIRMWARE\H501S LCD\901A LCD V1.3.3\HRC-F2-LCD.HBS
000045B5: 32 33
0002CBE2: 0C 0F
0002CBE4: 65 64
0002CBE5: 52 5A
0002CCA6: 65 64
0002CCC0: 0B 0A
0002CD4E: 65 64
0002CD68: 0B 0A
0002CDD0: 65 64
0002CDE2: 0B 0A
По смещению 000045B5 в первой прошивке находится “2”, в другой “3”. Это последний символ в тексте строки LCD V1.3.* Осталось узнать что означают другие 9 различий в этих прошивках.
Брал с рцгрупс. Собственно, прошиться ради самой прошивки намерения нет. Если только в 1.3.3 есть что-лучшее, по сравнению с предыдущей.
По смещению 000045B5 в первой прошивке находится “2”, в другой “3”. Это последний символ в тексте строки LCD V1.3.* Осталось узнать что означают другие 9 различий в этих прошивках.
Спасибо Олег. Когда я пробовал прошить LCD 1.3.3 из этого архива на своем пульте, и внешне процесс прошивки был успешный, то у меня в итоге в меню информации о прошивках оставалось LCD 1.3.2. После чего я сравнивал файлы драйверов 1.3.2 и 1.3.3 примитивно по их размеру, занимаемому на жестком диске 😃
В таком случае попробуйте прошить драйвер LCD 1.3.3 из этого же архива на своих пультах. Для этого:
- Скопируйте файл драйвера на карточку microSD, отформатированную FAT32. Не изменяйте имя файла.
- Вставьте карточку в слот пульта. Убедитесь что батарея пульта заряжена.
- Поместите правый стик вверх вправо (в правый верхний угол) и удерживая его в этом положении, нажав и удерживая также кнопку ВИДЕО, включите питание пульта.
- На дисплее пульта будет отображаться прогресс прошивки, дождитесь конца.
В таком случае попробуйте прошить драйвер LCD 1.3.3 из этого же архива на своих пультах.
Сергей, спасибо. Попробую на выходных прошить. Хотя, конечно, не очень понятно, что это в плане улучшения ЛСД должно дать.
И еще вопрос возник (возможно, что-то пропустил в основном обсуждении): с тельцем самого квадрика все понятно - 17-я самая надежная. А вот в плане пульта - почему в обсуждении указывается, что 4.2.8 самая хорошая? В архиве есть 4.2.13, в которой, к тому же, есть еще доп. пункт меню. С ней какие-то косяки, кроме того, что кто-то писал, что не может откалиброваться на ней? Стоит пробовать 13-ю для пульта в действии?
Пока себе сделал: V4.2.8, LCD v1.3.2 (попробую 3-ю), H501S V1.2.9 и V1.1.17.
А вот no-limit решил не ставить. На самом деле, 250 метров - “за глаза”. В части высоты возврата - тоже думал-думал, пока не знаю, что ставить. В итоге, решил оставить, как есть (10 м). Вроде до ситуации, когда он улетает очень далеко и куда-нибудь опускается вне зоны видимости стараюсь не доводить. Или лучше поставить метров 50? Подъем ведь тоже - расход батарейки… Не понятно, что с высотой возврата делать, чесслово.
Не калибруется на последних с H501S V1.2.3. Куда бы небыл повернут quad компас всегда вернется в 0. С H501S V1.2.9 калибруется и компас указывает реальное направление по сторонам света. На V4.2.14 тоже непонятный пункт меню fly without gps.
… почему в обсуждении указывается, что 4.2.8 самая хорошая? В архиве есть 4.2.13, в которой, к тому же, есть еще доп. пункт меню. С ней какие-то косяки, кроме того, что кто-то писал, что не может откалиброваться на ней? Стоит пробовать 13-ю для пульта в действии?..
Попробуйте, это не смертельно 😃 Я в своих экспериментах с прошивками пульта и коптера обнаружил, что с прошивкой пульта TX 4.2.13 заметно уменьшается дальность управления. Разрывы в управлении появляются начиная с дальностей 350…400 м на свободном пространстве, в то время как переход на прошивку 4.2.8 сразу отодвигает границу устойчивой связи в два-три раза дальше в этом же месте.
На рцргруппах после этой моей информации вроде даже нашли причину. Замеры показали уменьшение мощности пульта около 6 дБ (в четыре раза) с прошивкой 4.2.13 по сравнению с 4.2.8.
www.rcgroups.com/forums/showthread.php?t=2522182&p… пост #7945
Попробуйте и расскажите свои наблюдения. В остальном вроде все нормально работает на 4.2.13.
… Пока себе сделал: V4.2.8, LCD v1.3.2 (попробую 3-ю), H501S V1.2.9 и V1.1.17…
После всех экспериментов остановился пока на таком же наборе. На днях от парней из рцгрупп появилась информация, что по замерам обнаружена также разница и в мощности радимодуля канала управления и телеметрии самого коптера при разных прошивках. И в этом отношении RX1.2.3 предпочтительнее RX 1.2.9
www.rcgroups.com/forums/showpost.php?p=35482142&po…
Сообщите если вам удастся прошить LCD1.3.3.
Прелесть H501S в том, что пульт и коптер можно бесконечно прошивать разными версиями. Здесь нет концепции “одностороннего прогресса”, как например у Фантома 3/4, без возможности вернуться на старые версии прошивок.
…А вот no-limit решил не ставить. На самом деле, 250 метров - “за глаза”. В части высоты возврата - тоже думал-думал, пока не знаю, что ставить. В итоге, решил оставить, как есть (10 м). Вроде до ситуации, когда он улетает очень далеко и куда-нибудь опускается вне зоны видимости стараюсь не доводить. Или лучше поставить метров 50? Подъем ведь тоже - расход батарейки… Не понятно, что с высотой возврата делать, чесслово. …
Хороший вопрос, и важный.
Тоже считаю что 250 метров вполне достаточно в большинстве случаев. И главное безопасно с точки зрения высотных неожиданностей - ветры, облака с влажностью, и даже внезапные встречи с самолетами.
А вот высоту возврата RTH однозначно нужно увеличивать выше 10 м и выбирать с умом. Все зависит от условий полетов. Считаю что правило здесь простое: высота RTH должна быть минимум на 5 метров выше чем наиболее высокое сооружение в месте полетов. Иначе в случае возможного срабатывания RTH существует вероятность прокладки маршрута RTH по линии расположения препятствия, и тогда краш будет неминуем.
Для своей полетной местности (загородная местность) высоту возврата установил 50 метров. Это с запасом, с учетом деревьев (20…25 метров) и ближайших ЛЭП. Расход батареи на подъем на лишние 50 метров вовсе не большой, и уж точно это не сравнится с возможными потерями и сожалением о нелепом краше на маршруте RTH. В большинстве случаев полеты коптера проходят на высоте более десяти метров и часто автовозврат происходит на высотах выше установленного в прошивке. В случае с предустановленной высотой RTH в 50…70 метров коптер если и поднимется в аварийном режиме, то скорее всего не намного.
Скорость RTH я установил 10 м/с, отрабатывает хорошо.
Измерил мощность радиомодулей канала управления и телеметрии (2,4 ГГц) пульта и коптера с прошивками TX 4.2.8 и 4.2.13, а также RX 1.2.3 и 1.2.9.
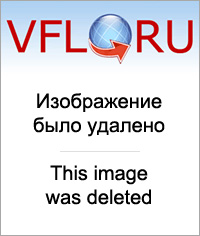

Подтвердились мои подозрения о различной мощности передатчика не только пульта, но и коптера.
Выходной сигнал передатчика пульта (канала управления, с аттенюатором 20 дБ):
TX 4.2.8
TX 4.2.13
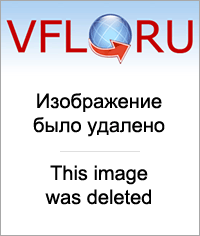
Выходной сигнал передатчика коптера (канала телеметрии, с аттенюатором 20 дБ):
RX 1.2.3

RX 1.2.9

Видно как мощность передатчиков на разных прошивках отличается на 10 дБ, это в десять раз по мощности. Что хорошо согласуется с результатами моих тестовых полетов на различных прошивках (около трех раз по дальности rcopen.com/forum/f135/topic468264/2), когда я впервые обнаружил заметное уменьшение дальности управления.
Таким образом из этих нескольких прошивок самой “убойной” по мощности является комбинация TX 4.2.8 и RX 1.2.3.
На прошивках TX 4.2.13 и RX 1.2.9 мощность передатчиков снижается в десять раз. При прочих равных условиях дальность по каналу управления и телеметрии снижается с этими прошивками до трех раз.
Во-первых, категорическое спасибо за проделанную экспериментальную работу.
Во-вторых, мы опять в ступоре )) Если с 4.2.13 все понятно (лучше 4.2.8). То что теперь делать с RX? Ранее мы все признали 1.2.9 в качестве самой оптимальной. Шиться обратно на TX 1.2.3?
Ну лично я не знал до сегодняшнего дня “всю правду” о 1.2.9 😃 Считал ее новой в сравнении с 1.2.3 и привычно думал что уже этим она и лучше. Тест на мощность передатчика коптера дал мне веский повод возвратиться на RX 1.2.3. На этой прошивке коптера я успел полетать несколько раз ранее, без проблем.
Если интерпретировать результаты теста мощности в практической плоскости то получается, что с прошивкой пульта TX 4.2.13 следует ожидать наступления сбоев и потери управления гораздо раньше чем на TX 4.2.8. А с прошивкой RX 1.2.9 приблизительно так же, раньше по расстоянию, начнется потеря данных телеметрии с коптера на пульт в сравнении с RX 1.2.3
Первое обстоятельство (сбои управления дальше 350…400 метров) ранее я наблюдал четко, о чем уже писал. Квадрик характерно “клевал носом” на картинке видео в полете в режиме “полный вперед”. А вот второе проявление (потеря данных телеметрии) будет уже менее заметно при общем просмотре, так как цифры телеметрии в случае пропадания данных с коптера не пропадают с дисплея, а просто остаются прежними до получения следующего пакета данных. Телеметрийные данные на время “замораживаются” на экране, затем вновь обновляются с приходом сигнала с коптера.
Только теперь, вспоминая свои дальние полеты на RX 1.2.9, я вспомнил про эту особенность. Показания счетчика расстояния на дисплее пульта при большом удалении коптера менялись уже не плавно и непрерывно, а скачками через несколько секунд. Сразу по несколько десятков метров.
Уверен что с возвратом на RX 1.2.3, и соответственно повышенную мощность канала телеметрии с коптера, эта часть работы системы улучшится. Но надо проверять.
Здравствуйте Форумчане. Недавно стал обладателем этого монстра из коробки было всё нормально,взлетал,калибровался. начитавшись местных форумов решил переполошиться на 1.1.17 и получил такую ситуацию:(
Не калибруется на последних с H501S V1.2.3. Куда бы небыл повернут quad компас всегда вернется в 0.
понимаю что всё дело в прошивке,но найти её не могу.Подскажите как быть
понимаю что всё дело в прошивке,но найти её не могу.Подскажите как быть
Нужно прошить обратно H501S V1.2.9 (RX 1.2.9). Взять здесь.
Видно как мощность передатчиков на разных прошивках отличается на 10 дБ, это в десять раз по мощности. Что хорошо согласуется с результатами моих тестовых полетов на различных прошивках (около трех раз по дальности Hubsan X4 FPV H501S - FAQ, инструкции, прошивки, модернизации), когда я впервые обнаружил заметное уменьшение дальности управления.
Круто, спасибо! А в миливаттах какая мощность у радиомодулей не известно?
Дорогие, други!Как и предыдущий оратор прошил квадрик на 1.1.17 ФК , соответственно прошил пульт RX 1.2.3. В результате сейчас стоят следующие прошивки:
v 4.2.8
lcd v1.3.2
h501S V 1.2.3
V1.1.17
Прошивал сразу, предварительно ничего не устанавливая. Квадрик нормально сбендился с пультом. Но дальность управления упала до 250 м.Высота не превышает 150м( сразу еще до прошивки установил выносные антенны ). При преодолении этих величин активизируется режим возврата домой.Несколько раз калибровал -результат тот же. Что не так? Если можно, для новоначального - ссылочки на алгоритм действий и пошаговая инструкция.Буду очень признателен!
Ну лично я не знал до сегодняшнего дня “всю правду” о 1.2.9 😃 Считал ее новой в сравнении с 1.2.3 и привычно думал что уже этим она и лучше. Тест на мощность передатчика коптера дал мне веский повод возвратиться на RX 1.2.3. На этой прошивке коптера я успел полетать несколько раз ранее, без проблем.
Ну вот, будет, чем заняться на выходных. Только смущают сообщения о калибровке компаса. Предполагаю, что после экспериментов надо будет вернуться на 1.2.9.
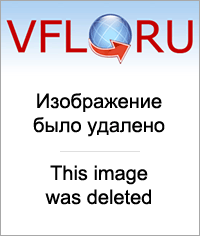
…А в миливаттах какая мощность у радиомодулей не известно?
На официальных фотографиях запчастей к H501S на плате молуля 2,4 ГГц “засветился” чип усилителя AMICCOM A7700. По спецификации его максимальная выходная мощность составляет 17.9 dBm, это около 62 мВт.
Друзья, проблемы с калибровкой компаса на некоторых прошивках мне непонятны… У меня компас калибруется на всех версиях FW.
Встречал мнение, и кажется на нашем форуме, что это может быть проявлением конфликта оборудования с прошивкой на некоторых экземплярах железа коптеров. Возможно применяются разные платы (чипы?) компасов. Не знаю определенно. Советую после каждой перепрошивки пульта и/или квадрика принудительно делать бинд пульта и коптера.
В любом случае пробуйте, и останавливайтесь на тех прошивках, с которыми меньше проблем именно на вашем железе. Сам производитель очень скуп на информацию о прошивках и нет каких-либо рекомендаций. Нет даже элементарного change log
Сегодня получил свой аппарат со следующими параметрами:
V4.2.14
LSD v1.3.4
H501S v1.2.9
V1.1.17
Вот думаю стоит ли перешивать?
В частности пульт на v1.2.8?
и квадр на H501s-FC-V1.1.17_RTH_35m_8msec_nolimAlt
Вот думаю стоит ли перешивать?
Вы бы хоть полетали для начала 😉
Поздно БАТЕНЬКА квадр уже перешил, сейчас над передатчиком колдую!
Просто этих
V4.2.14
LSD v1.3.4
вроде нет еще в свободном доступе и назад вернуться…
компас не калибруется, что делать?
Нужно прошить обратно H501S V1.2.9 (RX 1.2.9). Взять здесь.
СПАСИБО ТЕБЕ ОГРОМНОЕ!!! ВЗЛЕТЕЛ,ВО МНЕ ПРОСНУЛСЯ 13 ЛЕТНИЙ МАЛЬЧИК. Пойду ещё полетаю!