Hubsan X4 FPV H501S - FAQ, инструкции, прошивки, модернизации

После разборки и сборки остался неприятный осадок из ряда вопросов:
- Регуляторы лежат на вспененной подушке, которая загораживает доступ воздуха из вентилиционных щелей.
Создается впечатления что щели сделаны не для вентиляции, а для отвода воды (имхо). Может их можно удалить?- На нижнем брюхе расположено мало электроники (только видео плата, и то микропроцессор с внутренней стороны.
При замачивании с брюха шанс потерять контроль над квадром минимален.- Проведенная мною гидроизоляция скорее для спокойствия и долговечности чем для практики. В дождливую погоду квадрик достаточно защищен.
При полете без гидроизоляции может создать проблему только влажный воздух (туман).- Наклейка под GPS: кто то советует ее убрать, но я консервативных взглядов, если производитель ее туда положил, значит она нужна =)). Надо ли ее убрать?
- Тоже обратил внимание на это при первой разборке своего квадра. Причем щели-отверстия снизу и сверху луча, на разных половинах корпуса, не находятся друг против друга и смещены по горизонтали. Назначение клейких полосок непонятно. В своем хабсане убрал их, разместив платы регуляторов вертикально, в целом это можно разглядеть здесь:
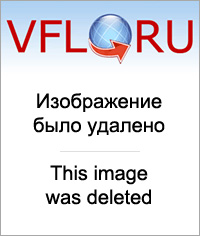
В результате поток воздуха через верхние щели луча омывает плату регулятора почти по всей длине и выходит из нижних отверстий луча. Думаю так лучше.
- Видеоплата сильно нагревается, точнее очень нагреваются чип видеопроцессора и экранированный модуль видеопередатчика. Назначение прорезей на брюхе сугубо вентиляционное. В своем хабсане сделал дополнительные радиаторы на чип процессора и видеопередатчик из-за опасений возможных проблем от перегрева.


- Решение по гидроизоляции плат поддерживаю. Не стоит забывать о риске долговременных окисленний/коррозии токоведущих проводников от повышенной влажности воздуха, поэтому данная защита направлена не только от мгновенных “купаний”.
- В своем квадре наклейку-экран убрал. Изменений в поведении в худшую сторону не заметил.
Чё за материал радиаторов?
Стало лучше или субъективно лучше?
балкон ,8 этаж северная полусфера небо чистое
модуль от хабсана (внешне что в аппе что в квадре они одинаковые)
программа U-center
по 10 минут курева на балконе с ноутом и всей байдой.
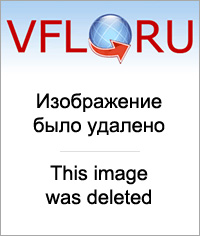
первый скрин экрана - без родной фольги, файл обозвал “bez ekrana” там время 22.13 на часах для ориентира
второй - с фольгой, файл обозвал “ekran”, время 22.25
с экраном если глянешь фиолетовый эллипс то реально лучше кучность показаний, уровень сигналов спутников лучше.
Но сразу скажу экран я расправил , на фото видно, если его залепить а-ля колпачек я хэзэ что там покажет в результате.
Да, сцук, мозг квадра работает на прием только на скорости 9600 , казлина, пробовал в модуле повысить скорость - квадр не воспринимает модуль. Вот такие дела. А на этой скорости … ну можно , но если бы была бы выше то можно и протокол UBX подключить и скорость задать не 1 раз в секунду а 2-10 раз в секунду. Но увы и ах пока.
сам запутался, короче время смотрим, на скринах , где 22.25 это тест с экраном, другое время скрин - без экрана
картинки оригинал
без экрана yadi.sk/i/-sZYDqLtxwKGc
экран yadi.sk/i/cAoTv3BNxwKHH
Ну вот! С экраном проясняетса.
Чё за материал радиаторов?
На чипе из алюминия(?) - отрезал от радиатора чипов старой компьютерной видекарты. На модуль передатчика вырезал пластину из латуни. Конечно хуже меди по теплопроводности, но из того что было под рукой.
Второе - рядом компас, нафиг наклейка.
Экран из немагнитного материала (предположительно медь), поэтому на компас никакого воздействия не оказывает.
балкон ,8 этаж северная полусфера небо чистое
модуль от хабсана (внешне что в аппе что в квадре они одинаковые)
программа U-center
по 10 минут курева на балконе с ноутом и всей байдой.
…
Расположение видимых спутников и соответствующие этому принятые данные меняются в течении минут. Методика не совсем корректная…
Экран из немагнитного материала (предположительно медь), поэтому на компас никакого воздействия не оказывает.
Вы про какой экран? Тот шо в квадре? У меня там чёрное что-то налеплено… Мягкое как жопа. Оно?
Сергей, прибавка по весу не смущает? Я лично за каждый грамм переживаю до паранойи.)
Мягкое как жопа. Оно?
:LOL: Экран на верхней половинке. Черный с одной стороны - с другой желтовато-белесый (видно только черную часть) на ощупь не как жопа, а как бумага. Его видно на фото на балконе. На нем модуль GPS лежит.
Мягкие как жопа в квадре только прокладки под регуляторами.
. Echelon писал:
разместив платы регуляторов вертикально
Отличное решение !
Сергей, из фото видна антенна, установленая вертикально (какая то своя или родная ?), если своя , то можно по подробней .
:LOL: Экран на верхней половинке. Черный с одной стороны - с другой желтовато-белесый (видно только черную часть) на ощупь не как жопа, а как бумага. Его видно на фото на балконе. На нем модуль GPS лежит.
Понил. До снятия экрана мои шаловливые ручонки просто не дошли.
Будем знать.😃
Сергей, прибавка по весу не смущает? Я лично за каждый грамм переживаю до паранойи.)
Смущает) На круг лишних грамм шесть-восемь набежало. Но на другой чаше весов - паранойя на тему перегрева видеоплаты))
Отличное решение !
Сергей, из фото видна антенна, установленая вертикально (какая то своя или родная ?), если своя , то можно по подробней .
Конечно можно! 😃
rcopen.com/forum/f135/topic468264/11
Да вроде ж прецедентов s peregrevom на моём веку пока не было, но согласен с тем, что тараканы в голове у всех должны быть свои, породистые. 😃
Теперь становится понятно неадекватное поведение квадра в режиме Follow me. При быстром движении цели данные об положении обновляются слишком медленно (раз в 1 секунду) и квадрик постоянно играет с нами то в “догонялки” то в “тормозилки”. Отсюда постоянные кивки и болтанки. Победить это наверное можно заменой модуля GPS, но это совсем другая история…
Единственно прикольно придумали разрабы нивилировали дивиации показаний координат. Тут один товарищ с форума (Владимир) заявил что у него квадр в ГПС весит колебаясь не больше сантиметра, теперь я понял что это невозможно (нагло придумывает). Колебания 10-20-40 сантиметров неизбежны с таким ГПС.
Интересно что будет если на полном ходу в АМ (16м/с) включить ГПС?
Не думаю что в этом причина. Частота обновления данных с применяемого GPS-модуля 10 Гц. Скорее всего дело здесь в скорости программной обработки и выработке реакций в режиме FM.
Тут один товарищ с форума (Владимир) заявил что у него квадр в ГПС весит колебаясь не больше сантиметра, теперь я понял что это невозможно (нагло придумывает). Колебания 10-20-40 сантиметров неизбежны с таким ГПС.
Владимира - предать анафеме!
Квадрик сжечь!
Ибо сатанинская точность позицианирования.
А вобще тёрли в соседней ветке.
до 1.5 метра дрейф, если склероз не подводит…
Интересно что будет если на полном ходу в АМ (16м/с) включить ГПС?
Кувырок. если против ветра. Был случай у юзера. Помню.
Друзья, давайте не будем загромождать эту тему вторичными комментариями и обсуждениями. Для этого у нас есть основная тема-помойка 😃
Не думаю что в этом причина. Частота обновления данных с применяемого GPS-модуля 10 Гц. Скорее всего дело здесь в скорости программной обработки и выработке реакций в режиме FM.
Сереж , я модуль выкрутил и в конфиг зашел, стоит 1 герц, пробовал дать ему хотя бы 2 Гц - не жует, мозг квадра не жует. Чуть позже подробнее проверю все скорости и режимы и протоколы.
В АПМ режим GPS задается еще несколькими параметрами, грубо логика какая, нашел он точку и усредняет ее не меняя пока разница точек не привысит радиус например метр или два, если сумма показаний переваливает за радиус он принимает новую точку и летит туды. Т.е. если задать ему радиус верных решений метров 6 то он будет метаться , православно веря что это верные координаты. Как на скринах дорожка из точек бегает туды сюды так и квадр начинает дрейфовать за ними.
Вот как? Где-то ранее встречал информацию про 10 Гц обновления с модуля. Кажется на rcgroups.
еще фишка, так как скорость 9600 , видимо скорости не хватает пропихивать такой поток данных, ставлю 9600, обновление 10 герц - и фиг, данных нет.
Скорость повышаю до 38400 - все прекрасно по NMEA бегут данные.
Модуль GPS хабсана может давать больше данных, но мозг квадрика не воспринимает.
во вложении на подоконнике, скорость 38400, 10 герц меню настроек и т.п. Скорость протокол и куча всего у U-blox модулей настраивается в самом модуле. В хабсане, по крайней мере у меня модули хоть и без надписей но U-center его видит как 8-ая серия своих модулей и настройки сохраняются изменяются пишутся.
В других темах пролетает тоже инфа в какой режим ставить модуль. У нас по-умолчанию стоит режим Portable.
скрин с описания U-blox режимов, коптероводы рекомендуют использовать режим Pedestrian.
источник------>u-blox.com/…/u-blox8-M8_ReceiverDescrProtSpec_(UBX…
Здравствуйте подскажете пожалуйста недавно стал обладателем H501S Hubsan X4 PRO пробовал его в полёте на пульте указано напряжение пульта 11.0 V и Квадрика 7.9 V нету не визуальной батарейки с делениями ни в процентах заряда батареи ? до какого напряжения держать квадрик воздухе чтобы не стал автоматически приземлятся или тупа не упал ?