Обзор Eagletree OSD Pro

Иглы не опускают нос принципиально, хотя чисто технически отработку руля высоты на снижения я видел. Надо настраивать не горизонтальный полет, а чтобы шло небольшое но правильное снижение - т.е. как планер для оптимального парения.
Надо настраивать не горизонтальный полет, а чтобы шло небольшое но правильное снижение - т.е. как планер для оптимального парения.
Это про калибровку “Искусственного Горизонта”? Я почему-то думал, что наоборот, при RESET, что-нибудь под нос самоля подкладывать. Что бы создать хоть небольшой, но положительный угол атаки крыла.
Скай у меня с симметричным профилем. Иначе он наверное и не полетит.
Хочу доукомплектовать свой Игл бародатчиком высоты и скорости. Вопрос: для правильного измерения баро высоты надо покупать датчик измерения температуры за бортом?. В АП Смаллтим в измерении баро высоты участвуют бародатчик высоты и датчик температуры. А как в Игле реализован процесс измерения баро высоты, с участием датчика температуры или без него и какую роль играет он в работе АП.
АП, вроде, направил нос на базу, но… самолет начинает делать левый разворот… и ШТОПОР!
Надо обязательно проверить воздушные скорости во всех режимах полёта на АП. Особенно, режим, когда высота выше коридора для крейсерского полйта. в нём АП вырубает мотор, и пытается летететь планируя домой, до высоты коридора, как снизится так врубит на крейсерский мотор. Соответственно если ниже коридора так буде набирать высоту давая газ на установленный на режм набора.
Либо гардин слишком задирает нос у самоля в режиме АП(калибровка авиагоризонта, и настройки гардина по тангажу/чувствительность в режиме АП) , либо сам самоль неочеь хочет лететь без мотора (задняя центровка).
для правильного измерения баро высоты надо покупать датчик измерения температуры за бортом?.
в иглах датчик температуры за бортом не обязателен.
датчика температуры или без него и какую роль играет он в работе АП.
Думаю, ни какую
в иглах датчик температуры за бортом не обязателен.
И к стати, он не показывает отрицательное значение температуры. Так что даж бесполезен.
Это про калибровку “Искусственного Горизонта”? Я почему-то думал, что наоборот, при RESET, что-нибудь под нос самоля подкладывать.
Это про настройку горизонтального полета при прохождении Визарда (или потом отдельной командой установки рулей для ровного полета) Т.е. оттримируй модель чтобы без мотора она планировала со снижением (“моторные” летчики обычно имеют тенденцию к перетягиванию ручки на себя и остановке самолета в воздухе если мотор не работает) - т.е. планировать без потери скорости модель должна все время.
Или же даже чуть-чуть сильнее опустить нос (но ес-но без такого чтобы модель уходила в пикирование).
И к стати, он не показывает отрицательное значение температуры. Так что даж бесполезен.
Угу, или 1 и выше или * если холоднее.
Надо обязательно проверить воздушные скорости во всех режимах полёта на АП.
У меня было по записи видно что модель идет носом в землю, а элероны ее крутят, это не штопор, а скорее пикирующая бочка (пикирует потому что обычную бочку с сохранением горизонтального полета эта модель выполнить не может априори).
Со скоростью засада - из-за приличного ветра ГПС показания не дают понять - какая же была реальная скорость.
Надо обязательно проверить воздушные скорости во всех режимах полёта на АП. Особенно, режим, когда высота выше коридора для крейсерского полйта. в нём АП вырубает мотор, и пытается летететь планируя домой, до высоты коридора, как снизится так врубит на крейсерский мотор. Соответственно если ниже коридора так буде набирать высоту давая газ на установленный на режм набора.
Либо гардин слишком задирает нос у самоля в режиме АП(калибровка авиагоризонта, и настройки гардина по тангажу/чувствительность в режиме АП) , либо сам самоль неочеь хочет лететь без мотора (задняя центровка).
Дык, это все ясно. Я же пишу, что раньше - все норм было.
За воздушкой - ессно. Следить надо всегда.
Гардиан у меня стоит так, чтобы самоль летел горизонтально. ЦТ даже чуть-чуть передняя. Самолет летит сам еще как 😃
А вот, можно в
калибровка авиагоризонта, и настройки гардина по тангажу/чувствительность в режиме АП
этом пункте по-подробнее? Че-то не вьехал, гардиан же, калибруется и настраивается для всех режимах одинакого?? (за исключением общей чувствительности - которая задается тумблером с аппы, для ФС можно и другое значение указать)
чувствительности - которая задается тумблером с аппы, для ФС можно и другое значение указать
Общая чувствительность гардина в режиме АП задаётся только через меню, параметр Stabilizer Overall Gain. Тумблер/крутилка чувствительности работает только в штатном режиме (не в режиме RTH) запоминать положение в приёмнике РУ как FS бесполезно.
Общая чувствительность гардина в ржиме АП задаётся только через меню, параметр Stabilizer Overall Gain
Упс! Возможно тут у меня собака порылась. Надо проверить.
Ребят, подскажите пожалуйста! 😃
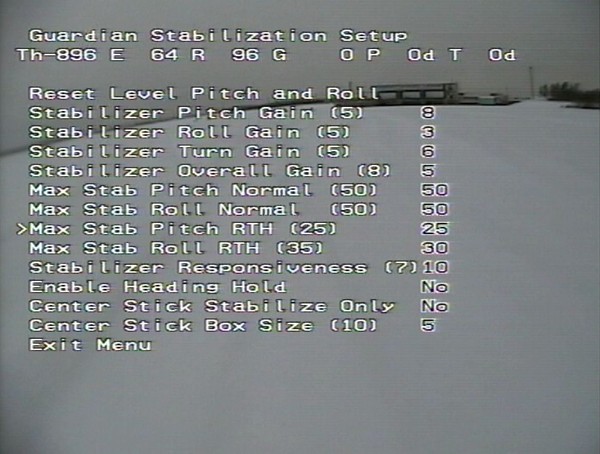
Решил покопаться в настройках гардиана и поять что к чему. Возникло пару вопросов над двумя пунктами:
Stabilizer Responsiveness (7): Чувствительность стабилизации.Высокое значение обеспечит быстрый ответ, но может случайно сорвать Вашу
модель на взлете, если стики управления перемещается слишком быстро.Низкое значение дает очень гладкий полет.
Правильно ли, я понял что: Чем больше значение - тем чувствительность гардиана будет выше => реакция на возмущение выше? Типа, как на гириках на вертолете?
Тогда следующий вопрос: В чем принципиальное отличие между обещй чувствительностью (Stabilizer Overall Gain) и этим пунктом?
Проблема в том, что гардиан, как мне кажется, стабилизирует самик с некоторым…эммм…запаздыванием. Отклик на возбуждение идет небольшим запаздыванием, из-за чего, при некоторых обстоятельствах, происходит дерганье. Например, как я писал выше, в крайних полетах: с выкл.стабилизацией ЛА летел стабильнее.
Stabilizer Turn Gain (5): Этот параметр помогает решить проблемы тримирования, которые могут приводить к постоянным поворотам модели.
Чем выше значение, тем больше компенсация добавляется к нормальному полету.
Тут я не допонял смысл этого пункта. По моим домыслам, он как-то влияет на триммирование модели, так? Типа, на сколько он чувствителен к триммированию? Непонятно как-то 😦
Правильно ли, я понял что: Чем больше значение - тем чувствительность гардиана будет выше => реакция на возмущение выше? Типа, как на гириках на вертолете? Тогда следующий вопрос: В чем принципиальное отличие между обещй чувствительностью (Stabilizer Overall Gain) и этим пунктом? Проблема в том, что гардиан, как мне кажется, стабилизирует самик с некоторым…эммм…запаздыванием. Отклик на возбуждение идет небольшим запаздыванием, из-за чего, при некоторых обстоятельствах, происходит дерганье. Например, как я писал выше, в крайних полетах: с выкл.стабилизацией ЛА летел стабильнее.
Stabilizer Responsiveness вернее будет перевести не как чувствительность, а как отзывчивость. Определяет “скорость” возвращения модели в горизонт после бросания ручек(если используется этот режим). А вот другие разные Gain-ы это уже непосредственно сама стабилизация.
Stabilizer Responsiveness
Ясно! Т.е. этот пункт относиться непосредственно к пункту, когда стабилизация включается “по бросанию ручек”. Эх, жаль, а то я уже обрадовался 😃
Итак, полетал… Сложилось такое впечатление, что иглу стало очень холодно и он постоянно (в режиме АП) наровил улететь к себе на родину - в китай 😃 База находится на севере, а он, после включения АП 2-3 сек продолжал лететь прежним курсом, а потом делал резкий разворот, на 180 градусов к базе (на Юг). И дальше по-всякому: То проболжал виражи делать, то останавливался и дальше улетал от базы на Юг, потом опять виражи наворачивал.
Очень странно 😦
Я, перед полетом, уменьшил ПИД, отвечающий за крен (а то он очень резко разворачивал, и у базы крен большой делал). Еще один ПИД, отвечающий за поворот. ПИД, отвечающий за курс не трогал (было 255).
Уменьшил общую чувствительность гардиана до 5 (было 8, из-за этого, в режиме АП он по высоте срывал самоль).
Как только с бубном не плясал - все тоже самое! О.о Даже ПИД, отвечающий за курс (терн пропоршионал лимит поставил, пчоти, в штатное значение - изминений нет) Логики между значениями ПИДов и работой АП не вижу вообще 😦 Такое ощущение, что он сошел с ума 😦
Придется бэкапить. Мб и поможет. Жаль, что тогда сотруться настройки АПУ 😦
Прошивка 10.39. До этого дня все работало нормально.
Сегодня было -15. Претензий к работе самого гардиана нет. Работал четко.
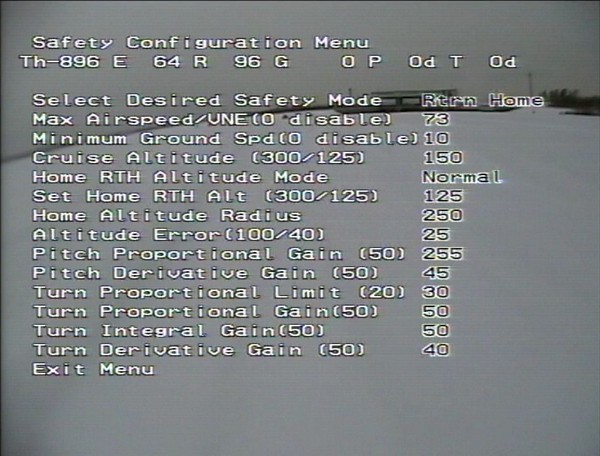
Вот такие настройки сейчас у меня стоят:
Ребят, выручайте, где тут криминал?
ПИД, отвечающий за курс не трогал (было 255
У вас же тангаж(PPG) на 255 стоит.
А крен (параметр TPL )стоит всего 30. Увеличивайте его гденить до 200 и все будет нормально. А PPG не надо такой большой делать. Он будет слишком сильно задирать нос самолета для набора высоты.
У вас же тангаж(PPG) на 255 стоит.
А крен (параметр TPL )стоит всего 30. Увеличивайте его гденить до 200 и все будет нормально.
Так, я же написал, что УМЕНЬШИЛ терн-пропорционал-лимит с 255 до 30. И разницы ни какой не увидел 😦 До этого он так и стоял 255.
А тангаж, все верно, пришлось выкрутить на максимум, т.к. игл, инача, почти не рулил РВ. Ооооооочень вяло им рулил. Когда выкрутил - стало лучше, но все равно, маловато. Элеронами раз в 10 круче рулит.
Так, я же написал, что УМЕНЬШИЛ терн-пропорционал-лимит с 255 до 30. И разницы ни какой не увидел До этого он так и стоял 255.
Limit задаёт ограничение максимальной реации. А саму реакцию надо увеличивать следующим параметром Gain.
Так, я же написал,
Очень много написано, я не понял что к чему))
Попробуйте убавить Stabilizer Turn Gain до 3-4
И кстати РВ у вас плохо управляется скорее всего из за того Stabilizer Pitch Gain задраный до 8
Инхо, эти параметры лучше по умолчанию делать. Мне 1 раз на фалконе потребовалось Stabilizer Pitch Gain править в меньшую сторону. Не хотел набирать высоту. Уменьшил до 3 - заработало.
Limit задаёт ограничение максимальной реации. А саму реакцию надо увеличивать следующим параметром Gain.
Так, если он мало отклоняет… Че-то запутался 😦
Попробуйте убавить Stabilizer Turn Gain до 3-4
И кстати РВ у вас плохо управляется скорее всего из за того Stabilizer Pitch Gain задраный до 8
Инхо, эти параметры лучше по умолчанию делать. Мне 1 раз на фалконе потребовалось Stabilizer Pitch Gain править в меньшую сторону. Не хотел набирать высоту. Уменьшил до 3 - заработало.
Так стоп!
вот в мануале написанно, что:
Stabilizer Pitch Gain (5): Данный пункт позволяет контролировать уровень угла крена для стабилизации. Если Ваш планер ”колбасит” по этой оси,
но не сваливает, то может помочь уменьшение шага крена.
Stabilizer Roll Gain (5): Данный пункт позволяет контролировать уровень тангажа для стабилизации. Если Ваш планер ”колбасит” по этой оси, но
не сваливает, то может помочь уменьшение шага тангажа.
если верить написанному, то у меня все верно: Тангаж ослаблен до 4, а крен зажат до 8. Хотя, меня сильно смутило, что “Пич” и “ролл”, какбэ, “перепутаны”. У АП, например, все наоборот: “ролл” - за крен, “Пич” - за тангаж.
Неужели ошибка в инструкции??
Так, если он мало отклоняет… Че-то запутался
Сначала усиливается параметром Gain и если он вышел больше чем Limit то ограничивается. Это для того чтобы при развороте в 180 градусов он не делал “бочку” 😃
Гм…интересно 😃 Хотя, мне казалось, что в настройках гардиана максимальный угол задается… Там для АП стоит 35 градусов. Хотя, на практике, он мой самуль на все 60 разворачивал. ну ладно, хотя бы так… а то вчера вообще хрен знает куда летел =(
Гм…интересно Хотя, мне казалось, что в настройках гардиана максимальный угол задается… Там для АП стоит 35 градусов. Хотя, на практике, он мой самуль на все 60 разворачивал. ну ладно, хотя бы так… а то вчера вообще хрен знает куда летел =(
Только Limit и Gain значения не в градусах. А просто в условных единицах, определяющих коэффициенты.