Activity
Неофициальный, конечно, т.к официальной статистики не ведется. Теперь лучший результат 21.5 км, и запас еще есть. При некотором везении можно будет приблизиться к 27-30 километрам 😃
Видео полета:
Некоторые подробности описал тут: rcopen.com/forum/f123/topic345331/1913
А вот на что способен малютка Фантом 3 Про:
Он настолько крут, что даже не по себе как-то)))
Мало кто знает, но липа, следы от липких почек тополя, а также кровь и кишки насекомых, налипшие на кузов во время поездок по трассе, прекрасно очищаются обыкновенным нашатырем (аммиак) из аптеки, который стоит сущие копейки. При этом указанные загрязнения отходят без следов и с минимумом усилий. Больше не нужно протирать ЛКП до дыр 😃 и не нужно покупать дорогие средства в автомагазинах.
Результат промежуточный. В ближайшие дни попробую еще. Текущий сетап максимум 22 километра обещает. После фокусов (если они получатся), до 27-30км.
Барахлишко в квадрике такое:
Рама сейчас Тарот 650 Iron Man. От рамы skydiver’a отказался, ибо качество изготовления там отсутствует, как класс.
Движки: KDE 3510-475.
Регули: KDE 20A
Моск: Наза 2
ОСД: TBS Core Pro
РУ: EzUHF + яги 8 дб + диполи на приеме
Видео: 1.2ггц 400мвт + диполь + яги 13 дб с лавмейтом.
Вес барахла 3 кг примерно.
Ну, собственно, вот. 61 минута 44 секунды, за которые коптер налетал ровно 54 километра. И еще есть резервы по его облегчению, так что окончательный результат потенциально может быть еще улучшен. Таким образом, вплотную приближаюсь к дальностям, за которые не стыдно уже самолетчикам, а не только коптерофобам коптероводам 😃
Подробности полета описывал на форуме в теме Долголеты. Здесь приведу цитату, чтобы не повторяться:
Сегодня летал на другой батарейке, на этот раз липо. 22000 мАч она отдает при разряде током 5А, 21800 при разряде стандартными коптерными токами, можно посчитать, сколько это в среднем, но ориентировочно в р-не 19-21А. Разброса почти нет, т.е это весьма хороший результат.
Летал так же, и там же. 3км туда и обратно, и так до полного прифигения)) У земли был штиль, на высоте 70 метров ветер был четко вдоль трассы полета, 2-2.5 метра в секунду ориентировочно. Туда летишь максимум 50-53 км/ч, обратно 70-75… И это самым лучшим образом сказалось на результате: средняя скорость получилась 52 км/ч, что и дало вот такую немаленькую пройденную дистанцию. 440 мАч было скушано на предполетную подготовку, итого получилось 21405/54 = 396 мАч/км. Существенная экономия, и только из-за меньшего ветра, т.к вес батарейки точно такой же, как и у предыдущей.
Продолжительность полета составила 61 минуту 44 секунды. Реально руки устали держать пульт. Надо колхозить подставку какую-нибудь, или раскладываться для полетов по полной программе: стол, стул, напитки…
В общем, налетал 54 километра в итоге. Вовремя понял, что батарея близка к пределу, был у самой базы, в 10 метрах над землей, начал плавненько снижаться, но все же не успел. Пошла просадка по тяге, и коптер снова ухнул на землю самостоятельно Мягко так ухнул, снова обошлось без повреждений.
Теперь ломаю голову, какие выводы сделать из-за данного опыта… 54/2 = 27км и обратно, так, что ли, получается?)))
Довел до ума мобильную часть базовой станции 😃 Из оргстекла соорудил складывающийся кронштейн для крепления фпв-рекордера. Теперь все красиво, компактно и готово к работе буквально за секунды. А самое главное - мобильно! К тому же удобно расположенный рекордер может играть роль резервного ФПВ монитора, в случае отказа основного. Для этого достаточно кинуть кабель к ретранслятору, что занимает буквально секунды.
Upd. А самое главное, я теперь точно не забуду включить запись!!
Наконец дошли руки навести порядок в наземном хозяйстве 😃 Тем более, что с опытом эксплуатации предыдущей конфигурации наземки пришло понимание того, что мне нужно на самом деле, а без чего можно обойтись.
А нужно мне следующее:
- Запас по дальности действия. Поскольку я прицеливаюсь на 22-25 км - теоретический максимум дальности моего пепелаца в идеальных условиях, дальности действия видео-линка и РУ, на мой взгляд, должны быть минимум в 2 раза больше.
- Удобство и комфорт эксплуатации. В голове есть такая картинка: сижу я в кресле с бокалом чего-нибудь освежающего в цветущем саду или на веранде дачи, а коптер в это время на удалении 20 км, и препятствия на трассе распространения радиосигнала меня не волнуют 😃
- Презентабельный внешний вид, минимум проводов.
- Высокая скорость развертывания.
- Компактность при перевозке.
- Возможность летать в неблагоприятных метеоусловиях 😃 В холода, проще говоря. Управляя коптером из комфортного салона автомобиля 😃 И при этом иметь возможность пользоваться как монитором, так и очками.
Обойтись я могу:
- Без автоматического антенного трекера, от которого в целом больше проблем, чем пользы.
- Без поворотки по углу места, т.к она добавляет хлипкости в конструкцию наземки, а для дальних полетов, по сути, не нужна, т.к угол на коптер почти всегда будет порядка нескольких градусов. (однако ж иметь возможность поворота по азимуту было бы неплохо…)
- Без красивых кнопулечек и рычажков, показометров и прочих огонечков.
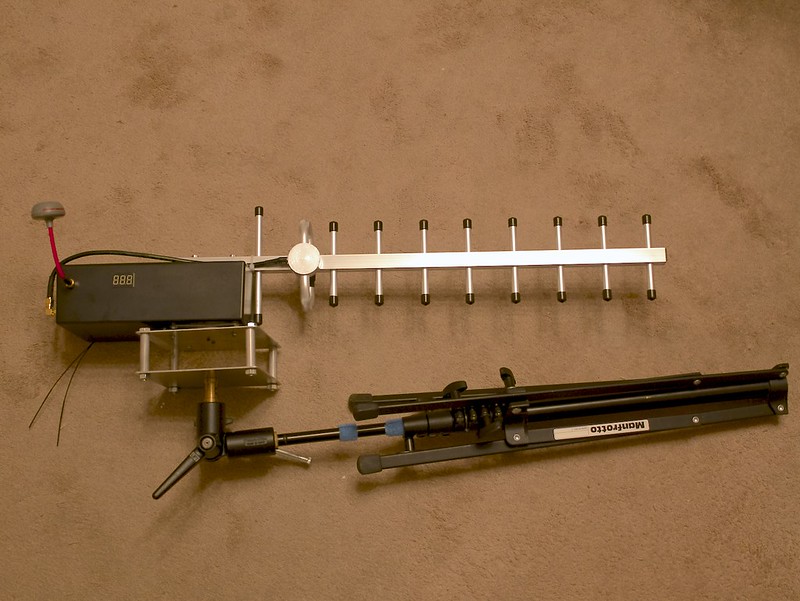
В итоге родилось вот это:


Данный девайс состоит из:
- Черного корпуса из чипидипа.
- Приемника Lawmate 1.2 ghz
- 4-канального сплиттера видео от RangeVideo www.rangevideo.com/43-video-splitter
- Мощной сервы, оставшейся от прошлого варианта моей наземки
- Алюминиевого основания и подшипника от поворотки AT-1000 Pro c сайта fpvpilot.com
- 13 дб яги 1.2 ггц, купленной здесь: www.readymaderc.com/store/index.php?main_page=prod…
- 5.8 ггц 0.5Вт передатчика TBS Boss (да, многовато для ретранслятора, зато был под рукой) team-blacksheep.com/products/product:109
- Липо-тестера (чтобы сразу видеть уровень заряда батареи - сильно экономит время при подготовке к запуску)
- Штатива манфротто высотой 2 метра.
- Приемника Graupner GR-24 для управления сервой (это вообще чересчур, но опять же, то, что было под рукой)
Питание включается зеленой кнопочкой, ретранслятор 5.8 ггц - красненькой 😃 На задней панели имеются выходы видео и разъем питания для внешнего монитора, если уж мне захочется подключить его проводным способом. Для полной же беспроводности был приобретен вот такой мониторчик с автономным питанием и диверсити:

Теперь о том, что это все дает. А дает это свободу 😃 Такую наземку можно разместить там, где удобно с точки зрения радиовидимости, а самому сидеть в холодке/тепле, по желанию 😃 Управление сервой поворотки выведено на крутилку на аппе. Перед полетом наземка ориентируется в направлении предполагаемой трассы полета, в случае уклонения от выбранного маршрута можно подстраивать антенну точнее (диаграмма направленности яги довольно узкая).
Вот так выглядит подшипник поворотки:

А вот так вся наземка выглядит в сборе со штативом, в транспортном положении:
Для большей компактности штатив можно отстыковать 😃
Ну и, чтобы уж совсем комфортно было, РУ 2.4 ггц можно ретранслировать на LRS 433 мгц с помощью вот такого девайса:




Девайс состоит из:
- Черного корпуса из чипидипа 😃
- Передатчика EzUHF 433 мгц
- Приемника Graupner GR-16.
- Кнопки и липо-тестера
- Яги 8 дб
- Штатива манфротто, аналогичного вышеприведенному
Прелесть системы в том, что ретрансляторы можно относить друг от друга как угодно далеко, исключая всякое взаимное влияние. Что касается дальности действия, то с передатчиком 1.2 ггц 400 мВт и диполем, согласно расчетам, она должна быть порядка 45-50 км, что меня полностью устраивает.
Через пару дней приедет монитор и поеду в поле, испытывать 😃
Все хорошее когда-нибудь заканчивается. Моя любовь к “зеленым панасоникам” закончилась в полном соответствии с этим утверждением. И произошло это вот как.
Через несколько дней после эпохального полета моего квадрокоптера на 17 км, я продолжил тестирование сборки из литий-ионных элементов NCR-18650b в реальном полете “на даль”, втайне надеясь достичь заветной отметки в 20 км максимального удаления)) К тому моменту, когда ОСД показал, что израсходована половина емкости батареи, улететь удалось только на 14 км. Ветер был встречный, и можно было спокойно пролететь еще 2-3 км, прежде чем развернуться, но тут и видео стало неожиданно ухудшаться (сейчас-то мне понятно, что произошло это из-за помех в зоне Френеля. От запланированного маршрута я отклонился, а на новом были помехи в виде деревьев в ближней зоне. Недостаточная высота довершила дело). Принял решение возвращаться.
В этот момент прозвенел первый тревожный звоночек. Во время разворота квадрик на мгновение потерял стабильность, “клюнув” на правый бок. Основные приключения начались на удалении 7 км от точки старта. Сам собой квадрокоптер сбросил почти до нуля горизонтальную скорость и начал быстро терять высоту, колбасясь по всем осям 😃 Реакции на стики не было. С 300 метров квадрик снизился до 120 метров, где стабилизировался без моего участия, сам собой. Я облегченно выдохнул, т.к мысленно уже готовился ехать подбирать его останки, тем более, что и видео грозило вот-вот пропасть. Управление вернулось и я продолжил полет в направлении точки старта.
История повторилась на удалении 3 км, когда квадрик был над плотным лесом. Только на этот раз запаса высоты не было. Я боролся за его выживание до последнего, пока не пропало видео.
Трясущимися руками покидал барахло в багажник и набрал номер GPS трекера. Против всяких ожиданий звонок прошел, что уже как бы намекало на то, что квадрик сидит на вершине дерева 😃 (в плотном лесу GSM покрытие у земли, как правило, отсутствует). Поехал к точке падения. Остановился на обочине дороги, сверился с показаниями навигатора. По прямой через лес до места падения было около 500 метров. Прикрутил к рации 8 дб яги, послушал маяк. Слышно. Направление подтвердилось.
В горячке поперся в лес прямо в чем был)) А был я в шортах, шлепанцах и поло по случаю жары в +32, которая стояла в начале июня. Пока дошел, думал сдохну. Тучи комаров, мошки, крапива, ветки хлещут по лицу… в руках айпад, яги и рация, в кармане - фонарик, за плечами - рюкзак с прочими нужными предметами. Горе-турист, в общем 😃
Пришел на точку падения. Квадрика на земле не оказалось. Предварительный вывод: сидит он, родимый, на вершине одной из трех елок, каждая метров по 20-25 высотой. Вернулся домой, так как окончательно стемнело.
На следующее утро я вернулся на место падения, учтя ошибки предыдущего вечера, особенно в плане одежды и обуви)) Вершины елок снизу не просматривались, и в общем, сделать тут можно было только одно: вернуться в город и нанять бригаду таджиков с бензопилами. Елки было жалко безумно, но и выбора не было. Не оставлять же кучу потраченного времени и 100+ тыщ. рублей просто так в лесу?
Приняв такое решение, я шагнул к выходу из леса. И тут произошло ЧУДО: сам собой, без какого-либо участия с моей стороны, квадрик спикировал с вершины одной из елок ПРЯМО К МОИМ НОГАМ. ЦЕЛЫЙ. Одним куском, что называется)) Беглый осмотр показал, что сломан только один проп, который был поврежден несколькими днями ранее.
В общем, счастье и профит))
Теперь о причине краша. А ей стала как раз сборка из панасоников. При длительной разрядке токами, близкими к предельным, есть вероятность, что она перегреется, и перестанет отдавать ток, достаточный для стабильного полета. Я знал опасный предел, и во время полета старался к нему не приближаться. Возможно, жара сделала свое черное дело, но сборка таки перегрелась.
В общем, по итогам этого случая от литий-ионных элементов я решил отказаться. Все хорошее когда-нибудь кончается 😃
Пытался тут полететь серьезно… на этот раз именно с целью установить новый личный рекорд дальности полета на квадрокоптере 😃 Улетел на 17 км, но на обратном пути чуть-чуть не рассчитал поправку на ветер. В итоге плюхнулся на поле с недолетом в 700 метров до точки старта)))
Видео:
Трек полета в Flytrex: flytrex.com/…/quadcopter-black-drone-full-carbon-l…
Там максимальное расстояние Flytrex показывает с учетом недолета. Поэтому по его данным я был только на 16.3 км 😃 Сам полет продолжался 53 минуты 24 секунды, при зарядке в батарею влилось 19800 мАч, что при ее емкости в 20400 мАч - очень хороший показатель. Вес коптера в полном сборе был около 2750 грамм.
Добавлю пару слов по самому полету. На сборке из панасов (писал о ней ранее) очень приятно летать. Солидно, стабильно, как танк 😃 Хотя конечно это батарея для полетов в тихую погоду. Чуть ветерок и квадрику может не хватить тока, который они способны выдать. Смысл в том, чтобы не выходить за комфортный для них уровень нагрузки максимум в 4А на ячейку, иначе они перегреются и тогда полет станет гораздо более захватывающим 😃 Несмотря на то, что я обо всем этом знаю, на последних километрах батарея, похоже, таки перегрелась (еще надо учесть жарищу в +30 без малого), и квадрик порой начинал жить своей жизнью. Например, стремился повернуться по руддеру. Чтобы парировать эти повороты, приходилось довольно активно работать стиком. Ну, а в самом конце, когда до финиша оставался километр, такая вещь, как набор высоты сделалась недостижимой мечтой 😃 Но все равно панасики молодцы - честно отрабатывали до самого конца, плавно, без отсечек разряжаясь “в ноль”. Поэтому и посадка, хоть и была нештатной, оказалось мягкой. Потерь нет, все цело.
В общем, эмоций и адреналина я получил в этот раз достаточно 😃 Дополнительно обострила ситуацию очень некстати разрядившаяся батарея на передатчике. Сигнал о ее разряде раздался, по закону подлости, именно когда я достиг 17 км, и не прекращался весь полет.
Что касается ФПВ оборудования… в этот раз полетел с RMRC 1.3 ггц 400 мВт передатчиком, штатной 3 дб сосиской на нем и 8 дб патчем на приеме. Видео, как можете видеть, было очень хорошим практически в течение всего полета. Помехи появились только на последних километрах.
Собственно, вот:
Трек во flytrex: flytrex.com/…/quadcopter-black-drone-full-carbon-l…
Полет рекордом не считаю, т.к сопровождался он всевозможными препятствиями и косяками. Результат есть, а удовлетворения нет. На видео уже с удаления 1.7 км пошли какие-то помехи в виде полос, потом оно пыталось пропадать уже на удалении в 7 км, чего раньше никогда не было. В этом полете на ЛРС я поставил яги 8 дб, так вот поначалу думал, что помехи из-за мощных наводок от нее. Но разнос и переориентация антенн не помогли, хотя эффект должен был быть. А на следующий день от жары, не иначе, сдох передатчик видео на 2.4 ггц… 😃 Хваленый тюненый лавмейт от ТБС. Видимо, помехи были его предсмертными конвульсиями 😃 Так и придется возвращаться назад на 1.3 😃 А лавмейты, что тюненые, что нет, так или иначе могут сдохнуть, как показывает практика. Попытаюсь поменять его по гарантии 😃
По моим наблюдениям улеты коптеров случаются по трем основным причинам:
- Неадекватное поведение полетного контроллера
- Зависание приемника РУ
- Не настроенный или неправильно настроенный фейлсейф.
Что касается первого пункта, то, как показывает анализ опыта других коптероводов, столкнуться с неадекватным поведением можно практически на любом контроллере из используемых в настоящее время. У одних это происходит чаще, у других реже, но, пожалуй, ни один полетный контроллер не вызывает в подобных случаях столько негатива, сколько вызывает DJI NAZA 😃 В принципе, тут все понятно - низкий порог вхождения. Чтобы настроить какой-нибудь МультиВий, надо убить не один час. С назой многие поступают просто - воткнул, полетел 😃 В этой простоте и кроются всяческие соблазны, которые, в свою очередь, приводят к улету и крэшам коптеров 😃
Соблазн первый: выкинуть прилагаемую палку и прикрутить модуль компаса прямо на раму.
Соблазн второй: не заморачиваться с правильной установкой модуля компаса и грамотной прокладкой его провода относительно силовых проводов и регулей.
Да, я утверждаю, что причины неадеквата Назы и связанных с ним улетов в большинстве случаев кроются в наводках на модуль компаса и на кабель, соединяющий его с назой.
Речь идет о наводках, вызванных постоянным и переменным магнитным полем, создаваемым различными силовыми элементами коптера. Применительно к коптерам, эффективный способ борьбы с подобными наводками есть только один: максимальный разнос со всеми потенциальными их источниками. Есть и другие нюансы. Для себя я выработал ряд рекомендаций, которым следую в общении с Назой, и пока, тьфу-тьфу! - флайэвеи меня обходят стороной 😃 Более того, когда они были, я их вылечил именно таким способом.
Итак, что нужно делать, чтобы Наза не взбесилась?
-
Ни в коем случае не снимать модуль компаса с прилагаемой палки. Никаких вот этих “некрасиво”, “мешает” и т.д.
-
Кабель, соединяющий его с назой располагать как можно дальше от силовых цепей. Не допускать, чтобы этот кабель болтался по всей конструкции. Он должен идти к назе по кратчайшему пути и быть зафиксирован на всем своем протяжении. Расстояние до силовых проводов должно быть не менее 4 см. Пересечения с силовыми проводами даже на этом расстоянии должны происходить по возможности под прямым углом. Если после соблюдения вышеперечисленных условий остался излишек кабеля, то его можно намотать виток к витку на палку, на которой крепится сам модуль компаса, и зафиксировать на ней любым удобным способом, например термоусадкой.
-
Обязательно калибровать компас перед каждым вылетом и после каждой смены батареи. ОБЯЗАТЕЛЬНО!
Что делать, если Назу “понесло”?
Кратковременно переключиться в режим MANUAL, после чего сразу же вернуться в ATTI. Лучше именно в ATTI, т.к велик шанс, что до устранения причины наводок, бешенство Назы продолжится в режиме GPS .
Теперь объясню, почему я так уверен, что именно наводки на компас вызывают потерю контроля над коптером и его потенциальные улеты или крэшы. Уверенность идет из анализа аналогичных случаев, описанных на RCGroups, FPVLab, RCDesign 😃 и прочих подобных ресурсах.
-
Нет данных об неадеквате Назы в режиме MANUAL. Наоборот, в случае неадекватного поведения Назы, только кратковременное переключение в этот режим и способно вернуть управление пилоту и удержать ее от улета на историческую родину 😃
-
Отсутствуют данные о неадекватном поведении Назы с физически отключенным модулем компаса. Т.е, проще говоря, выдернули компас из контроллера, и навсегда забыли о подобных проблемах 😃
-
Если внимательно посмотреть видео с улетами и неадекватом Назы, коих полно на ютюбе и форумах коптерной тематики, можно заметить, что в случае потери контроля, Наза начинает описывать круги с очень большим радиусом, что наводит на мысли о “туалетинге”, и, соответственно, о явных проблемах с компасом. Круги можно наблюдать только на тех видео, где был запас высоты. Если его не было, то, как правило, коптер на полном ходу втыкается в планету, либо его туда втыкает не ожидавший засады пилот 😃
-
Сознательно нарушая вышеприведенные рекомендации, вы имеете все шансы испытать Flyaway на собственной шкуре 😃
Это и произошло сегодня со мной. Я отлетал несколько паков без каких-либо проблем, а потом поставил свою сборку из “зеленых панасоников”. Забывшись, разместил ее на коптере не как обычно, а так, что силовой кабель оказался практически параллелен проводу компаса на участке в 8-10см. Расстояние между ними было около 2 см. Надел шлем, летаю в режиме ЖПС, блинчиком. Через пару минут обратил внимание, что коптер ведет себя так, словно я летаю в ветер. Постоянно приходилось подруливать, парировать спонтанно возникающие возмущения. Понятно, что продолжать подобный полет было бы опасно. Я подвесил коптер в нескольких метрах от себя, и обнаружил, что его неуправляемо носит в горизонтальной плоскости. Это было похоже на ситуацию, когда Наза видит мало спутников, и точность позиционирования становится недостаточной. Однако светодиод при этом мигал двойными зелеными вспышками. Я посадил аппарат, произвел беглый осмотр, и обнаружил именно то, что и ожидал увидеть. Батарею перевернул, заново откалибровал компас, и - о чудо! - идеальный, стабильный полет. В общем, сегодня я был близок к тому, чтобы отписаться в теме “Собираем статистику крэшей и отказов коптеров” 😃
Теперь что касается зависания приемника РУ. Эта ситуация опасна тем, что ее невозможно предсказать, а единственная возможность предупредить - использовать фирменные, проверенные приемники. Я не слышал, чтобы висли Футабы и Граупнеры. А вот разномастные поделки с ХК - да, порой виснут. Это та самая причина, по которой улетают коптеры, оборудованные прочими полетными контроллерами, не Назой 😃 Хотя и Назы это тоже касается. Какое-то время назад Джедаям пришлось отбиваться от необоснованных обвинений в улетах коптеров, вызванных именно зависаниями различных кривых приемников, после чего в ассистанте появился пункт “Advanced failsafe”. Логика его работы такова, что если сигнал на выходе приемника не меняется в течение заданного промежутка времени, Наза считает, что приемник завис, и принудительно переходит в режим failsafe. По этой же причине оптимальное подключение приемника к Назе - PPM или S-BUS, т.е одним единственным проводом. Если отвалится этот провод, переход назы в режим failsafe гарантирован. Произойдет ли это в случае пропадания контакта в одном из десяти проводов, соединяющих приемник и назу по PWM - боольшой вопрос… представьте, вы дали полный газ, а тут отваливается канал газа. Что там будет на входе Назы? Полный газ? Ноль газа? Последнее значение? Я предпочитаю не играть в угадайку.
Выглядит зависание приемника так. В какой-то момент пропадает управление. Коптер отказывается подчиняться командам с пульта. Пилот думает, что пропал сигнал РУ и произошел фейлсейф. На самом деле приемник ЗАВИС. На его выходе остались какие-то последние значения, непосредственно предшествовавшие зависанию. Если это были 40% газа или руддер - вам повезло, коптер сядет или будет крутиться на месте. Но как правило далее пилот мечется по земле и беспомощно наблюдает, как его аппарат улетает по прямой и быстро скрывается в голубой дали. Если на борту были средства поиска, шансы вернуть его еще есть. Если не было - полный привет.
Ну, а третий пункт, который касается не настроенного вовсе или криво настроенного фейлсейфа, тривиален, и его я комментировать не буду 😃
Времени сегодня вечером было в обрез, поэтому на поле выбрался только после заката. В экспресс-программу испытаний вошли два пункта: 1) проверить сборку из элементов Panasonic NCR-18650b в реальном полете “на даль” 2) проверить, как снимает свежеприехавший Мебиус с широкоугольной линзой.
Сразу разрушу возникшую было интригу 😃 Программа испытаний увенчалась полным, нет, даже ПОЛНЕЙШИМ успехом!
Честно говоря, перед полетом у меня были вполне оправданные опасения: а потянут ли мои панасоники весьма нелегкий коптер в реальном полете? Пусть и блинчиком, но с набором нужной, и немалой для полета на даль, высоты. Оказалось, что потянули. Не без оговорок, но лететь можно. Правда, стиль пилотирования дальнелета с питанием от подобной сборки в корне отличается от пилотирования такого же коптера, но с питанием от нормальной липохи. Приходится каждое действие соразмерять с током потребления. Во время набора высоты сбрасывать горизонтальную скорость. Во время горизонтального полета сбавлять газ и идти с небольшим снижением. В итоге все эти ухищрения помогли держать ток потребления в р-не 20А, и это несмотря на +450 грамм веса, по сравнению с предыдущим тестом, в котором я летал на липохах. Причем для упрощения собственной жизни, летал я без крышки коптера, т.е его аэродинамика была примерно как у куска г.на 😃
Теперь про Мебиус. Им я остался очень доволен. Качество картинки, аэродинамика, вес, цена!!! Все настройки я сделал “на глазок”, буквально за 10 минут перед выездом на поле. Саму камеру просто приклеил к днищу коптера на двусторонний (правда, очень и очень качественный) скотч. Немного боялся, что она отвалится в полете и затеряется в навозных полях, но ничего, импровизированное крепление выдержало 😃 Качество картинки в нижеследующем ролике, правда, немного страдает, т.к камера экспонировалась по ярком небу, и землю пришлось вытягивать из глубоких теней на пост-обработке. На будущее поиграю с режимами, с WDR всякими, думаю, поправимо.
Желе, как можно видеть из видео, практически нет. И это при этом, что с пропами и моторами я не делал ровным счетом НИЧЕГО. Никакой балансировки, никаких подвесов. Полет в режиме воткнул-погнал 😃
Теперь о вопросах энергетических. Полет длился 17 минут 24 секунды. Дольше летать я не стал, т.к уже совсем стемнело. От взлета до посадки было пройдено 12.6 км с максимальным удалением в 3.2 км. Скушано было 5717 мАч. В реальности, я думаю, около 5200-5300, т.к сенсор тока чуть-чуть завышает показания.
Итого, что мы имеем. Посчитаем грубо, просто чтобы получить некий ориентир. 5717/12.6 = 454 мАч/км. Исходя из того, что сборка имеет емкость 20400 мАч, а безопасно “высаживать” ее можно до 19000 мАч, то получаем 19000/454 = 41.85 км теорически возможного полета, или 20.92 км максимального удаления. В общем, что и требовалось доказать 😃
Полетал еще сегодня. Пытался решать вопросы с РУ и видео.
С РУ вроде бы решил. Вкрутил на передатчик длинную антенну (даймонд 771), на приемник вернул диполи, которые стояли на дискавери. На видео-передатчике пробовал штатную сосиску на 3дб. Впечатления пока двойственные. То на удалении порядка 2.5 км видео чистое, то на 3.5 км уже в довольно сильных шумах. А то и на 1 км такое наблюдалось. И кстати, самопальный коаксиальный диполь, по ходу дела работает лучше фабричной сосиски. Посмотрите видео, прокомментируйте. Пока списываю на особенности летного поля… в целом после сегодняшнего полета остался с ощущением, что по видео запаса нет Борюсь с искушением вернуть проверенный сетап на 2.4 ггц, по которому запас есть, и очень хороший Но мы пионеры, нам не чтобы сделать дело, а чтобы задолбаться))) Максимальное пройденное расстояние увеличил на 1км, до 19.2 км. Батарейку при этом не насиловал в хлам, но, в общем, уже понятно, что с ней потолок по макс. удалению - 10км. В целом сегодня старался летать так, чтобы максимально экономить энергию. Высоту лишнюю не набирал, летал низенько) следил за потреблением тока, старался его удержать ниже 20А.
Кстати, охрененно удобно оказалось видеть перемещение коптера на карте прямо там, на поле, в реальном времени! Прога называется iTelemetryFPV, есть для андроида и для iOS. У меня сейчас два штатива. На одном трекер с пачтем на поворотке, а на втором - монитор, чуть пониже которого на держателе закреплен айпад Получилась совсем уж базовая станция. Смотришь на экран, рулишь, и сразу же видишь на карте, где именно и куда летишь.
В общем, это уже рутина, в порядке теста слетать километра на три Но был, кстати, один интересный момент. Начиная с 9:48 на удалении 2.5 км начал падать параметр Link Quality (РУ). Он в правом нижнем углу. И одновременно - уровень сигнала РУ. RSSI здесь показывает прямо в дбм, которые легко перевести в микровольты, при желании. И вот как нельзя более наглядно стала видна польза работ по уменьшению бортовых RF шумов. В какой-то момень уровень сигнала РУ упал до -100…-102 дбм. И что бы вы думали? По хрену мороз, никаких фейлсейфов! А теоретический потолок чувствительности приемника EzUHF, между прочим, всего лишь -112 дбм. Бортовые шумы на уровне ниже -100 дбм - это, однако, достижение
Так вот, возвращаясь к теме. Немного погодя начало деградировать видео. Как потом оказалось, между мной и коптером оказался большой холм с дачами На холме - вышка сотовой связи. Да и высота была всего 70 метров. На бреющем шел Я потом треки полета в Google Earth посмотрел, и можно сказать, что в какой-то момент прямая видимость вообще пропала На 2.4 ггц видео отвалилось бы гораздо раньше, я полагаю…
PS: хозяйке на заметку Сегодня столкнулся с ситуацией, когда летишь вроде прямо, ручки на пульте ровно стоят, а коптер идет с легким креном на бок. Оказывается, на высоте был ветер, и это наза подруливала, чтобы держать курс Так что не удивляйтесь в подобной ситуации.
И картинка с треками, для наглядности 😃
Сегодня в Москве выдался денек с относительно приличной температурой воздуха, и я приступил к дальнейшим испытаниям свежепостроенного квадрика-дальнелета 😃 Почему дальнелета - понятно из его предназначения. Аппарат затачивается на покорение максимально возможных расстояний. Разумеется, по FPV. Ну, и с обязательным возвратом на базу, конечно же 😃
Пару дней назад я спаял батарею из так называемых “зеленых панасоников” - элементов питания, широко известных в узких кругах - NCR-18650b. Сборка имеет конфигурацию 4S6P, т.е 14.8 вольт, 20400 мАч, весом 1212 грамм с проводами и импровизированным кожухом. Внутреннее сопротивление получившейся батареи, по данным зарядника Graupner Ultra Duo Plus 60, находится в пределах 38-41 миллиОм. Предварительные поэлементные испытания показали, что предел токоотдачи этих элементов равен 5А, а комфортно они себя чувствуют при токах 3-4А. На предельных нагрузках они довольно сильно разогреваются, градусов до 40-50, по ощущениям.
Перед испытаниями квадрик был перевед в режим полной боевой комплектации, с гоупро 3 блэк в защитном кожухе, привешенной на демпфирующее основание от Зенмуса H3-2D. Вес квадрика составил 1520 грамм, т.е вместе с батареей получилось 2732 грамма.
Ввиду того, что под нагрузкой напряжение на любой сборке из литий-ионов просаживается гораздо сильнее (из-за большего внутреннего сопротивления), чем на нормальной липо, решено было использовать пропы большего размера, чем я бы поставил, если бы полетел на литий-полимерной батарейке. Сегодня планировал поставить свежеприехавшие карбоновые пропы Тарот 16х5 b-shape, но они ВНЕЗАПНО не налезли на ось мотора 😃 Ну, бывает, недоглядел при заказе. Пришлось довольствовать треугольными пропами 15х5 того же производителя.
Когда их ставил, как-то вылетело из головы, что вес квадрика КАК БЫ великоват для моих моторов (MN3110-26 470 kv) и этих пропеллеров, и в результате тест на время висения превратился в изощренное изнасилование “зеленых панасоников” на предельных режимах эксплуатации.
Я понял это, когда поднял квадрик в воздух, и увидел, что ток висения равен 26А, что уже было близко к пределу. По мере разряда батареи ток поднялся до 31А. Висел, немного летал туда-сюда, иногда садился, что проверить, греются ли аккумуляторы. Они грелись, но вменяемо, из-за +9 градусов на улице.
Интересно началось дальше. На 27 минуте полета квадрик потерял стабильность и просел по высоте, едва не коснувшись земли. Вот как это выглядело:
Потом это повторилось еще раз, и еще. Максимально удалось продержать его в воздухе всего лишь 30 минут и 10 секунд. После чего опыт решено было прекратить, ввиду его очевидной опасности для всей конструкции 😃 Минимальное напряжение под нагрузкой было 12.1-12.3 вольта, по данным EzOSD скушано было 14700 мАч, что неплохо сходится с реальностью, т.к при зарядке влилось 13700 мАч.
Выводы из опыта:
- На потерю синхронизации или отсечку регулей симптомы не похожи. Регули у меня TBS Bulletproof 30A, и никаких отсечек там, насколько я знаю, нет.
- Насчет перегрева регулей уверенности нет, но: все-таки они на 30А и с радиаторами. Правда, при отсутствии вентиляции, т.к они были засунуты внутрь лучей.
- Наиболее вероятно, что под предельной нагрузкой батарея просто перестала отдавать необходимый ток, НАЗА пыталась добавить газу на отдельных моторах для стабилизации коптера, в результате падал ток на всех остальных. Итог - потеря высоты.
- При использовании литий-ионов, вроде моих панасоников, ставить пропы на размер-два больше, чем следует из калька и здравого смысла - насущная необходимость. Проверенная теперь и на практике 😃
Дальнелет я ненавязчиво анонсировал еще с осени 😃 В течение осени и зимы постепенно подбирались недостающие комплектующие, потом была довольно быстрая фаза строительства, а теперь идет уже второй день ходовых испытаний. Коротко о конфиге:
- Композитная рама от skydiver’a.
- ВМГ: MN3110-26 470kv и 15x5 T-Motor карбоновые пропы. В качестве источника питания будет опробовано два варианта: два пака в параллель 4S 11A/h Maxamps и сборка 4S6P из зеленых панасов NCR18650b.
Остальные комплектующие более-менее перекочевали со старого доброго Дискавери. В их числе LRS EzUHF, EzOSD, Naza V2, камера TBS69 и т.д. С видео решил поэкспериментировать, для чего приобрел 400 мВт 1.3 ггц передатчик от RMRC и приемник с SAW фильтром от них же.
Вчера состоялся первый полет. На тот момент без ФПВ оборудования. Сажал по пищалке 3.5 вольт на банку, с батареей 8400 мАч отлетал 32 минуты, при этом на зарядке влилось 7100 мАч. Полетный вес был 2200 грамм.
Из замеченных недостатков: сильный “туалетинг” против часовой стрелки, потеря высоты при полете вперед. Второй недостаток проявлялся вообще интересно. Если заставить коптер быстро лететь вперед, то коптер теряет высоту плавно. Если потом резко потащить его стиком в обратном направлении, то он проваливается вниз на пару метров, и только потом наза его как бы подхватывает. Гейны на тот момент были такие: 110/110/130/130 и 130/130.
Сегодня начал плотно играться с гейнами (чему немало способствовал BTU назы, т.к теперь для настройки не нужен комп, достаточно айпада), но в самом начале полетов коптер опять начал туалетить, я немного зарулился и грамотно впилил его в металлический флагшток (летаю на стадионе). Из потерь только два передних пропа, у которых стали “махриться” кончики, примерно по 1 см у каждой лопасти. Думал, все, трындец, но оказалось некритично, и опыты продолжились. Летать в боевом режиме на этих пропах я уже не буду, а для опытов пойдут. Вибраций почти нет, наза с ума не сходит.
Так вот, что касается гейнов. Первая мысль - низковат vertical гейн. В несколько приемов приподнял его аж до 180. Ноль эмоций, ситуация с потерей высоты не изменилась. Поднял АТТИ гейны до 145/145. Ожидаемо повысилась резкость стабилизации, но и только. Дай, думаю, подниму бейсик гейны. Поставил 130/130, эффекта нет. Поднял до 145/145. И вот тут я заметил, что коптер перестал плавно терять высоту в горизонтальном полете и перестал проваливаться при резком реверсе. Поставил 155/155. Получил интересный результат 😃 Теперь при резком реверсе коптер не только не теряет высоту на 1-2 метра, но и ощутимо взмывает верх. Тут уже все стало ясно, я понизил вертикал гейн до 150, и - вуаля! - идеальный горизонтальный полет. Там, кстати, кто-то жаловался в теме про назу, что делать в такой ситуации, когда коптер взмывает вверх при резком реверсе. Решение: понизить бейсик и вертикал гейны. Пропорцию подобрать опытным путем.
Теперь выводы:
- Влияние гейнов на поведение назы далеко не такое очевидное, как в мануале. В частности, тесная связь бейсик и вертикал гейнов для меня стала небольшим открытием.
- Удивительно, но увеличение бейсик и АТТИ гейнов странным образом вылечило и туалетинг. Небольшие остаточные явления были пролечены доворотом модуля ЖПС по часовой стрелке. Так что если кому-то не удается победить это замечательное явление, есть смысл посмотреть в сторону увеличения гейнов.
Ну, а насчет планов, надеюсь, что с максампами смогу летать в р-не 50-60 минут, что должно дать 18-22 километра максимального удаления. С панасами, если хватит токоотдачи, должно быть и того больше. При сравнимой емкости они значительно легче. Два максампа весят 1600 грамм, а сборка панасов примерно 1200 вместе с проводами. Что касается возможностей РУ и ФПВ оборудования, думаю, должно хватить хватить с запасом. Приобрел 433 мгц 8 дб яги радиаловскую (Y5-433), все шумящие компоненты на борту замотал фольгой. Пока не хватает хорошей передающей антенны на 1.3 ггц, оставил штатный “крысиный хвост”.
Народ, требуется помощь зала. Есть 65 см модель старинного парусника Wasa. Достаточно сложная, много деталей и такелажа. При перевозке чуть-чуть надломили переднюю рею, на которой крепятся стаксели. Теперь эту рею требуется заменить. Кто-нибудь знает, где в Москве такое можно проделать? Я просто абсолютно не в курсе вопроса.
Ссылка на пост: История потери и чудесного спасения коптера
Комментарии в видео на английском. Надеюсь, это ни для кого не будет проблемой 😃 В конце ролика есть карта со схемой перемещения коптера.
18 сентября в Московской области выдался единственный за долгое время приличный денек, и я отправился в уже хорошо знакомый Ступинский район на полеты. Была у меня амбициозная цель: улучшить предыдущий личный рекорд дальности - 7 км. В этот раз я хотел улететь на 7.6-8км, чтобы побить лучший результат ФПВЛаба. Как выяснилось, амбиции наказуемы 😃
Поначалу все шло хорошо. Обычная предполетная подготовка, развертывание базовой станции. Кстати сказать, затачивая Дискавери на дальние полеты, я постарался максимально предусмотреть возможность потери коптера. Для этого были приобретены:
-
наземный рекордер видео, чтобы по картинке и данным телеметрии, которые идут в аудио-потоке от EzOSD, восстановить произошедшее. Возникшие неполадки, местонахождение аппарата, высоту, курс, скорость и т.д.
-
EzAntenna Tracker. Такая платка с экранчиком, которая умеет управлять сервами поворотного устройства наземной направленной антенны, и, ко всему прочему, отображает и хранит данные последнего принятого пакета телеметрии, чтобы оперативно получить последние ЖПС координаты, а не выуживать их потом из видео в горячке.
-
Маяк Петра: fmtv.us. Это маячок на 433 мгц, с кучей функций, программируемой частотой, режимом VOX (маяк не передает, когда работают моторы - очень удобно. Упали, заглохли - пошла передача) и отвратительными мануалами и техподдержкой со стороны самого Петра, который просто забивает на это дело и в конце концов перестает отвечать на почту. Описываю все плюс и минусы, т.к хочу быть максимально объективным.
Казалось бы, предусмотрено почти все, вероятность потери коптера сведена к минимуму. Ан нет! И дело было так.
Взлетел, набрал метров 200, взял курс в сторону Московской большой бетонки. Летел по ветру, поэтому скорость была большой, около 95 км/ч. Как потом выяснилось, я думал, что лечу в одном направлении, но на высоте зарулился, и потом выяснилось, что на самом деле я летел тоже в сторону бетонки, но совсем в другое место.
Спокойно достиг удаления 7.6 км, развернулся назад. Скорость сделалась около 60 км/ч, чтобы было логично, т.к теперь я летел против ветра. Тихонечко возвращаюсь, никого не трогаю, как вдруг на удалении 6.3 км пропадает видео! Раздается щелчок релюшки в диверсити приемнике видео от ImmersionRC на 2.4 ггц, и я понимаю, что эта зараза мне с какого-то перепугу подрубила штырь вместо патча, а на штырь 7 db на этом расстоянии приема нет! Вручаю пульт помощнику, начинаю лихорадочно плясать вокруг приемника, отключаю нахрен штырь, надеясь, что приемник сам переключится на патч. Но все тщетно. Картинки как не было, так и нет. Что делать?! Фейлсейф назы с такого расстояния домой аппарат дотащить не успеет, т.к коптер в этом режиме летит очень медленно, и батарей точно не хватит. Делать нечего, врубаю Home Lock и тяну ручку на себя. Газ поддерживаю на уровне примерно 45-50%, чтобы коптер потихоньку снижался.
Несколько напряженных минут вглядываюсь в небо, надеясь услышать жужжание и увидеть подлетающий аппарат. Минут через 8, когда он уже должен быть на базе, понимаю, что коптер потерян и назад не прилетит. На всякий случай врубаю фейл-сейф, хотя понимаю, что это ничего не даст, выключаю аппаратуру и приступаю к плану Б.
И тут выяснилось, что наземный рекордер, зараза, завис на помехах, и запись часть времени просто не шла. Никогда такого с ним не было, тестировал много раз. А тут завис. Вдобавок побился и отказался вопроизводиться файл.
Я бегом к Antenna Tracker, трясущимися руками вбиваю координаты в навигатор, и понимаю, что это координаты точки в 800 метрах от меня. И похоже, что через эту точку я пролетел на пути туда, т.е с тех пор координаты в нем просто не обновлялись.
Остается последняя надежда - маяк! Садимся в машину, едем к предполагаемому месту падения. Как выяснилось потом - едем в совсем другую сторону. Меня смутил похожий лесок, который был в очках перед пропаданием видео. Ну, потом-то выяснилось, что это был другой лесок 😃)
Едем, периодически останавливаясь и прослушивая частоту маяка. Тишина. Ездили до темноты. Теперь уже делать нечего, надо бросать. Еду домой в расстроенных чувствах, пытаясь осознать горечь от возможной (очень, очень возможной!) потери коптера стоимостью примерно 70 тыр, считая третью проху блэк. Сейчас вся надежда на то, что дома удастся восстановить побившееся видео.
Дома вожусь с видео. Уф, восстановилось. Удалось выяснить, что видео пропало не вдруг, а потом коптер еще немного передавал, данные телеметрии еще принимались на протяжении минуты. Изначально я грешил на отказ по питанию, теперь же понял, что проблему надо искать где-то в другом месте. Ну, установил район происшествия, выяснил, что когда уже не было картинки, коптер развернулся под углом 90 градусов к курсу возврата домой и на хорошей скорости и снижаясь под углом градусов 20 полетел на запад.
Дальше по карте рассчитал примерный район падения, координаты записал в навигатор и на следующее утро отправился на поиски, в надежде, что маяк еще работает.
Утро было туманным и дождливым, район предполагаемого падения оказался заросшим мелки, очень плотным березняком, в котором без маяка коптер я бы не нашел никогда. Часа два шлялся туда-сюда и размахивал антенной рации, надеясь поймать сигнал маяка. Тщетно. Уже почти смирился с потерей, но тут осенило. Если коптер снижался, то в конце-концов у него должен был пропасть сигнал РУ, и фейлсейф должен был погнать его в сторону дома, через лес. Решил проверить эту гипотезу и послушать маяк еще и в местах, расположенных между последними известными координатами коптера и домом.
Приехал в деревню Секирино, вышел из машины, включил рацию, и… не поверил ушам и своему счастью, когда услышал четкие сигналы маяка! Все три посылки, которые говорили о том, что коптер находится в радиусе метров 500! Ну, а дальше было дело техники. Довольно быстро я взял пеленг на коптер, покрутился еще в округе с полчасика, т.к показания были противоречивые, потом вкрутил на рацию антенну поменьше, чтобы дополнительно ослабить сигнал, и вышел четко на коптер, который мирно лежал на траве в 1 метре за забором чьей-то дачи!
Повреждений не было никаких. Даже пропы целы! Только полетную камеру немного залепило грязью. Липохи обе вздуты, понятное дело. Счастью не было предела 😃))
Дома я просмотрел видео и восстановил картину событий. Оказалось, что хоум-лок не врубился, и я тупо тянул коптер задним ходом, а поскольку он был в режиме АТТИ, то его носило по ветру хитрыми кругами, пока действительно не сработал фейл-сейф, и на высоте метров 30 не потащил его домой. Так продолжалось до тех пор, пока в батареях не осталось энергии и коптер мягко не сел на травку-муравку! И вот здесь загадка. Почему собственно мягко? У меня регули с прошивкой SimonK, отсечка по напруге там вроде не стоит. В назе контроль питания отключен. А садились мягко. Видимо, так же мягко разряжались батареи 😃 Это единственное объяснение.
Вот такая история! На днях, для полноты картины постараюсь выложить видео беспилотных приключений коптера и схему его передвижений 😃
Пока это новый личный рекорд по дальности FPV полета на квадрике, и, смею надеяться, самый дальний полет на TBS Discovery 😃
Update: обновил ссылку на ролик. Теперь она указывает на полную версию ролика, с нормальным цветокором и без глюков. Предыдущую делал глубоко в ночи, посему вышло кривовато 😃
Решил запостить сюда фото моего текущего рабочего сетапа для полетов на даль.
Встречайте TBS “Air-bomb” Discovery 😁
Конфиг такой:
Рама: оригинальная TBS Discovery с установленным TBS Core
Моторы: 2216 900kv T-motor
Пропы: Graupner 9x5
Акк: Kypom 4500 mah 4S
Моск: NAZA-M + GPS
РУ: Graupner MX-20 + 433 Mhz EzUHF TX + 8ch EzUHF Diversity RX.
FPV: TBS69 Camera (Pixim Seawolf 690 Твл) + Lawmate 2.4 Ghz 800 mWt VTX + Skew planar wheel антенна от Circular Wireless
Lawmate 2.4 ghz VRX + 14 dbi patch (или такой же клевер, что и на передатчике)
OSD: EzOSD (TBS firmware)
Gopro 3 Black Edition