Activity
Это запись практически всего полета. Качество, к сожалению, только 720р60, т.к камера случайно переключилась в этот режим. Полет основного коптера 450 размера проходил в среднем на высоте до 10 метров при максимальном удалении около 3 км. В качестве ретранслятора использовался квадрик 700-го размера весом около 2 кг и запасом времени висения около 95-97 минут в полном сборе со всем оборудованием. Ретранслирует он одновременно видео 1.2 —> 5.8 и РУ 868 —> 2.4. На выходе передатчика РУ (лора модуль) пришлось использовать полосовой фильтр, чтобы исключить его влияние на видеолинк (а оно есть, и сильное).
Во время этого полета ретранслятор висел на высоте около 40-50 метров. Оба коптера управляются одновременно с одного пульта (Taranis QX7).
Все системы отработали штатно, полетом я доволен. На очереди тесты на максимальную дальность полета на сверхнизких высотах.
Произвел обновление своего полетного хозяйства, а именно ретрансляторов радиоуправления и видео. Сейчас всё это выглядит так. Ретранслятор видео, внешний вид, интерфейс:
Функционал:
- Выбор рабочего канала из списка
- Выбор приемника (1-й, 2-й или диверсити режим)
- Выбор частоты и мощности передатчика 5.8 ггц
- Управление встроенным рекордером
- Автовыключение фпв экрана и тачскрина после начала записи
- Воспроизведение сделанных записей
- Управление всеми режимами ретранслятора с брелка 433 мгц (например, включение записи) (1 клик, долгое нажатие, двойной клик - и так по каждому каналу)
Если потребуется еще какой-то функционал, легко реализовать в коде. Из более менее дорогих комплектующих только дисплей Nextion. В остальном 5" экран с али, писалка Eachine, передатчик АКК, приемные модули 1.2, ардуина и разная рассыпуха.
Брелок:
Ретранслятор РУ:
Функционал:
- Два диапазона 433 мгц и 868 мгц (на базе QLRS)
- Индикация напряжения питания и потребляемого тока
- Отображение принятой телеметрии на встроенном экране
- Сохранение последнего принятого пакета с координатами GPS в энергонезависимую память (что удобно при поиске аппарата)
В дальнейшем планирую реализовать меню с настройками QLRS. Выбор частот, мощности для лоу, миддл и хай уровней, и т.д.
Как-то так. На подходе летающий ретранслятор LoRa 868 -> 2.4 и 1.2 -> 5.8 на базе 700 мм коптера, управление которым и удаленным фпв носителем осуществляется с одного пульта одновременно)) Летающий ретранслятор облетан и испытан на дальностях порядка 2-3 км (и сверхнизких высотах) до удаленного фпв носителя (450-й квадрик). Видео тестового полета выложу в ближайшее время.
Нужно всё это для реализации моей фетиш-идеи в виде полета на квадрике на 20-40 км и обратно на сверхмалой высоте, до 10-15 метров, что должно сделать лонг рэндж полеты в разы интереснее. Смотреть на Земплю в режиме гугл-мапс надоело, если честно 😃
Особенно пилотам-дальнелетчикам😁 Нужно срочно наладить выпуск.
Довольно провокационный заголовок, не находите? Однако ниже я попробую показать, что реальное положение дел именно таково, поскольку подтверждается измерениями. Краткая предыстория вопроса. С начала сезона для дальних полетов я плотно использовал QCZEK LRS, сначала на 433, потом на 868 мгц. На 868 перешел потому, что размеры антенн оказались намного меньше, что особенно удобно на коптерах, где места прямо скажем немного, и приходится конкретно поломать голову, чтобы разместить все компоненты 😃 Антенны на обоих концах линка использовал Vee - диполи, настроенные точно по прибору на середину рабочего диапазона. Выходная мощность передатчика РУ чаще всего была около 250 мвт, иногда ее приходилось поднимать до 400, но в большинстве случаев до отметки 15 км на 250 мвт долетал или вообще без фейлсейфов, или буквально с одним фейлсейфом на одном и том же удалении, примерно на половине макс. дальности. При этом Лора модем, расположенный на коптере (приемник РУ и передатчик телеметрии на землю) вещал на мощности всего лишь 60-75 мвт, и в течение всего полета телеметрия на земле принималась вообще без каких-либо проблем. Т.е всегда, постоянно, без перерывов. И вот это несоответствие не давало мне покоя. Стало ясно, что проблема кроется где-то в радиочастотной совместимости оборудования, установленного на коптере. Сегодня до этого наконец дошли руки, и я решил провести ряд экспериментов, тем более, что Криштоф (автор QCZEK) выпустил обновление прошивки 1.92, в котором по моим баг-репортам он исправил вычисления RSSI в дбм и SNR (соотношение сигнал-шум) в дб. Видеть эти два параметра на земле мне было крайне необходимо, поскольку они позволяют моментально выяснить причину проблем с линком. И я ее выяснил, проведя 3 эксперимента.
Эксперимент первый. Выяснение пределов линка РУ в идеальных условиях.
Идеальные условия - это практическое отсутствие шумов в месте приема, не считая местного фона, теплового и т.д. Достиг я этого, установив 50 ом терминатор на входе приемника, а с ретранслятором РУ (с установленным Vee диполем) в одной руке и аппой в другой стал постепенно отходить от коптера. Места в доме не хватило, пришлось спуститься в подвал, чтобы добиться пропадания линка и фейлсейфа))
Результат: телеметрия показала, что фейлсейф случился при RSSI на уровне -116…-118 дбм и соотношении сигнал/шум на уровне -7 дб. Отрицательное с/ш - в порядке вещей, поскольку LoRa умеет “выковыривать” сигнал из-под уровня шумов в силу особенностей протокола. Для того, чтобы понимать, насколько это низкий уровень уровень сигнала, приведу такой пример. Пару лет назад, когда я летал на старой ЛРСке (EzUHF) yа расстоянии 20 км на 433 мгц при выходной мощности 200 мвт и передающей антенне (яги) с усилением 8 дб уровень принимаемого сигнала был около -90 дбм. Скидываем 5 дбм, представив, что поставили диполь вместо яги. Итого -95. Теперь такие расчеты. На 40 км получилось бы -101 дбм. На 80 км -107 дбм. На 160 км = -111 дбм. А ФС у лоры наступает при -118, как мы видели в домашнем рэндж тесте. Итого уже 320 км рисуется в конфигурации диполь-диполь 😃 С учетом влияния атмосферы и прочих шумов будет конечно поменьше, но расстояния получаются гигантскими, не правда ли? И они не выглядят прям уж фантастическими, потому что один радиолюбитель из Швейцарии добился 200 км дальности с лора модемами. В ютюбе есть ролик, кто хочет, может поискать.
Ок, это то, что мы можем получить в идеале. Теперь проводим
Второй эксперимент с выяснением пределов линка РУ в реальных условиях
Для этого на приемник на коптере ставим диполь, а терминатор ставим на передатчик ретранслятора РУ. Таким образом приемник будет собирать всю бортовую “гадость”, все помехи, а главное - начнет принимать мощный сигнал передатчика видео, антенна которого расположена буквально в 20 см. (на коптерах 450 размера места не особо много, да!) Снова гуляем по дому и спускаемся в подвал.
Результат: на этот раз фейлсейф поймался при уровне всего -87…-89 дбм при с/ш -7. Т.е реально уровень шума на входе приемника был в тот момент аж на уровне -81 дбм! Это очень много. В переводе на язык расстояний это означает, что 7-10 км будет вашим пределом по дальности, дальше пропадет радиоуправление. И это на лоре, с ее возможностью уходить ниже уровня шумов! На обычных лрсках, работающих в FSK, дальность оказалась бы более чем в 2 раза меньше. Всё это говорит нам только о том, что приемник лоры нехило задавлен близкорасположенным передатчиком видео на 1.2 ггц. Ок, подумал я, проведем еще один опыт, на этот раз с отключенным передатчиком видео. И что же вы думаете? На этот раз фейлсейф случился уже при -97…-99 дбм при с/ш -8. Если бы коптер был дальше от компа, то разница была бы еще больше.
Третий эксперимент. Раз есть помеха, от нее надо избавляться. Поэтому сделал по-быстрому режекторный фильтр на частоту моего передатчика видео 1160 мгц. Настраивал его по прибору, подавление на частоте 1160 мгц оказалось порядка 30 дб. Чуть даже промазал, мог бы 35 дб получить в идеале. Через тройничок прикрутил его ко входу приемника и пошел делать измерения. И снова, что и требовалось доказать: на этот раз фейлсейфы начались при уровне сигнала -101…-103 дбм при с/ш -8 дб. Решил перепроверить, снял фильтр. Получил прежний результат: фейлсейфы пошли при уровне -87…-89 дбм при с/ш -7.
А это, на секундочку, целых 14 дб разницы, или порядка 6 раз по дальности. Учитывая, что на 250-400 мвт я спокойно долетал на 15 км на диполях на обоих концах линка, прогнозируемая дальность его работы оказывается порядка 90 км, что более чем достаточно. В общем, на этом вопрос с ограниченной дальностью РУ линка на лоре (да и на других лрс тоже) можно считать закрытым. Учитывая все вводные, полагаю, что я исследовал его исчерпывающе. Конечно, остается еще окончательно проверить выводы в реальном полете, но 90% вероятности, что именно так всё и окажется. Какие-то погрешности могут появиться из-за влияния атмосферы или помеховой обстановки в зоне полета, но не думаю, что это влияние будет критичным.
Теперь окончательный вывод. Я утверждаю, что 90% проблем с ограниченной дальностью работы систем дальнего радиоуправления моделями (ЛРС, LRS) происходят из-за “оглушения” приемника радиоуправления близкорасположенным передатчиком видео. Дополнительный вклад вносят шумы от других компонентов: пишущей или ФПВ камеры (они очень фонят на 433 мгц), полетного контроллера и т.д. Столкнувшись с маленькой дальностью недешевых и казалось бы отличных систем ЛРС, летчики-пилоты обычно начинают “шаманить” с антеннами, с попытками поднять мощность передатчика и т.д. Это всё мертвому припарки и ловля блох. Потому что даже антенна с КСВ равным 3 (т.е ппц как расстроенная) на рабочей частоте теряет (или “недособирает” скорее) лишь около 10% ЭМ энергии, а это сущие копейки для бюджета линка!
Далее, мощность передатчика. 250 мвт - это 24 дбм. 1 Вт - 30 дбм. А теперь вдумайтесь в следующее: это всего лишь 6 дб разницы или 2 раза по дальности! ВСЕГО ЛИШЬ. А из-за “оглушения” приемника РУ передатчиком видео мы теряем порядка 14 дб (102-88 = 14 дб, см. данные моих измерений) а 14 дб, это порядка 6 раз по дальности. Без забития приемника РУ мощным сигналом с передатчика видео, дальность работы радиоуправления была бы в 6 раз больше! Т.е мы видим, что поднимать мощность передатчика - тоже не выход. Эффект очень слабый. Сильный эффект, будет, кстати говоря, если вместо диполя на передатчик поставить хорошую направленную антенну, яги или Харченко. Последняя мне спокойно дает 10 дб прироста, что решило бы все мои проблемы с линком. Но я не сторонник забивания гвоздей микроскопом! 😃 Всегда лучше решить проблемы на стороне приемника, чем увеличивать мощность передатчика. Ни к чему вносить свой вклад в глобальное потепление 😃 да и эээ… balls поберечь бы надо, пригодятся. А это, кстати, камень в сторону отдельных ЛРС с выходной мощностью в 7 ватт 😃 Для сравнения: телеметрия с лора модема принималась с расстояния 18 км при мощности 75 мвт без единого затыка. Вот тут “кто-то” слетал и протестировал))
В общем, если перейти от теории к практике, то гарантированным решением большинства проблем с ограниченной дальностью РУ линка (особенно если входные каскады приемников не блещут хорошей схемотехникой, что справедливо для очень, очень многих систем ЛРС) является режекторный фильтр точно на частоту вашего передатчика видео, подключенный между антенной приемника и входом приемника РУ. Этот фильтр решает проблему “оглушения” (забития, низкой избирательности по соседнему каналу) приемника РУ, хотя и вносит небольшие потери в уровень принимаемого сигнала. Тем не менее, от него в 100 раз больше пользы, чем вреда, что мы и видели на конкретных цифрах.
Если будет время, попробую снять видео, где подробно покажу процедуру измерений. Всегда лучше один раз увидеть, что сто раз прочитать 😃
update. Как показали дальнейшие опыты, режекторный фильтр на частоту передатчика видео проблему решает не полностью. Коллеги по хобби подсказали, что гораздо лучше на входе приемника применять полосовой фильтр, оставляющий из всего спектра принимаемых антенной частот только те, что составляют рабочую полосу приемника, и отсекающий все те, что лежат вне этой полосы. Рабочая полоса в нашем случае - 868-870 мгц. Режекторный фильтр можно использовать, если не нужна передача телеметрии с борта, т.к применение такого фильтра поднимает КСВ система антенна-фильтр вплоть до 7, что уже неприемлемо (хотя при малых мощностях, 50-100 мвт - некритично). Полосовой фильтр на ПАВ (SAW) таким недостатком не обладает. КСВ с ним не более 1.8 в рабочей полосе частот.
Такой фильтр я в итоге изготовил самостоятельно. Характеристики получились следующими:
- Вносимое затухание в полосе 868-870 мгц: 2.4…2.6 дб
- Подавление частот вне рабочей полосы: не хуже 45 дб
- Подавление частот передатчиков видео 1160-1280 мгц: порядка 50 дб
- КСВ в рабочей полосе частот: 1.6-1.8
- Вес: 4 грамма
Выглядит он так:
Скриншоты амплитудно-частотных характеристик:
На этом могу констатировать, что проблема с ограниченной дальностью системы РУ QCZEK LRS (и аналогичных) решена. 😃
Надоело летать и снимать Землю, решил поснимать Луну 😃 Ночь выдалась хорошая, с чистой атмосферой и правильным освещением нашего естественного спутника.
Техника применялась следующая: Panasonic GH5s + Sigma AF 120-300 (EF Mount) + 2x Sigma teleconverter. Ролик состоит из нескольких отдельных кадров, снятых разными способами: с разным фокусным расстоянием, от 120 до 300 мм, с дополнительным цифровым внутрикамерным телеконвертером (когда камера снимает в фуллхд, сканируя только центральную часть матрицы), с кропом 200% из 4К и т.д. Максимальное эквивалентное фокусное расстояние составило примерно 2000 мм. Результатом и четкостью полученного видео я остался вполне доволен, в отличие от прошлой попытки, которая также есть на канале.
Давно собирался написать этот разжигательный пост, и вот наконец собрался 😃 Приступим. Сразу скажу, что написанное ниже основано на личном опыте и некотором (небольшом возможно, но вполне достаточном) понимании принципов работы и ограничений чудодейственной модуляции LoRa, на которую так молятся адепты секты свидетелей кроссфайра))
Итак. Как изначально позиционировалась на рынка данная LRS? Именно как LRS, т.е как система дальнего радиоуправления моделью. Что значит дальнего? В моем понимании это километров так от 20-ти и более. О чем гордо и заявляли сами ТБСники, демонстрировавшие видео полетов на 20 км с мощностью всего 10 мвт. Правда, в горах, т.е при девственно чистых зонах Френеля, ну, и эфире, соответственно. Заявлялось буквально следующее: “Вот, посмотрите, 20 км всего при 10 милливаттах! Представляете, как далеко можно улететь на 2 Вт?! На Луну!”
Теперь подумаем о видеолинке. Видеолинк какого диапазона способен обеспечить такие дальности? Правильно, для 90% фпв пилотов это 1.2 ггц. Линк 2.4 ггц у большинства “сдохнет” на удалении 25-30 км. Это я еще оптимистично беру, по максимуму. Чтобы “пробить” дальше, нужно очень-очень сильно ухищряться с антеннами и их точной настройкой. Линк диапазона 5.8 ггц “умрет” при удалении 15-20 км. (тоже беру по максимуму) Можно чуть-чуть дальше попытаться, но кому нужно наводить настолько узконаправленные антенны? Правильно, никому. К тому же будет очень сильная зависимость от погодных условий на радиотрассе. В точке взлета солнышко светит, а где-то посередине между пилотом и носителем туман сгустился - и всё, на большом удалении даже ОСД не разглядеть будет. В итоге, резюмируя, выбор сводится к единственному варианту: чтобы спокойно летать на большие расстояния, 20 км++, видеолинк должен быть на 1.2 ггц. Но тут выясняется первый ужасный факт
1. Кроссфайр НЕ РАБОТАЕТ с видео 1.2 ггц!
Давит его напрочь. Причем проявляется это далеко не сразу, а лишь когда сигнал видеопередатчика достаточно ослабнет, т.е на некотором удалении. Я провел всё лето 2016-го в тщетных попытках понять, почему я не могу улететь с видео 1.2 ггц и кроссфайром дальше 10-12 км. Экспериментировал с расположением антенн, фильтрацией, разносом ретрансляторов РУ и видео (разумным, 50-70 метров не решало проблему). Всё было бесполезно. При удалении порядка 10 км видео начинало просто тухнуть. Не снежить, а именно уходить в черноту, сбой синхронизации и т.д. Причем наблюдалось это уже на мощности кроссфайра 25-100 мвт, больше я никогда и не пытался ставить. Я до последнего не верил, что виноват кроссфайр, ведь я же заплатил 300+ у.е за САМУЮ ЛУЧШУЮ СИСТЕМУ РУ В МИРЕ! Однако потом мне пришлось признать печальную правду. Кроссфайр был снят, на его место водружен старый добрый EzUHF, и чудесным образом я сгонял сначала на 26, а потом на 30 км на коптере, при почти идеальном видео. Правда, это случилось уже в следующем летном сезоне. 2016 год был потерян, за что спасибо чудесному кроссфайру.
Вот здесь rcopen.com/forum/f123/topic345331/4210 Я подробно описывал заключительную часть эпической борьбы с пропаданием видео. Там же есть и видеопример. Или вот еще пример со скриншотом помех, генерируемых кроссфайром: rcopen.com/forum/f90/topic142729/11883 Причем, что самое интересное, на смешном удалении, всего-то 1.5 км.
Идем дальше. Компания ТБС тоже довольно быстро осознала масштаб этой проблемы, о которой начали активно писать на рцгрупсе и фпвлабе, но ограничилась советом ставить high pass фильтры на вход приемника видео (которые не помогают, я даже режекторные фильтры ставил, настроенные точно на 868 мгц, подавление порядка 35 дб НИЧЕГО не решало), а сама тем временем переобулась в прыжке решила сменить маркетинговое позиционирование продукта, предложив его рейсерам. Мол, это самая лучшая система для гонщиков! Идеальная связь, никаких фейлсейфов!
А я утверждаю, что
2. Кроссфайр не имеет никаких преимуществ для рейсеров, а стоит в разы дороже других систем РУ.
Теперь вспомним, что нужно гонщикам от системы РУ. Две вещи: надежность линка и низкие задержки в канале РУ. ТБСники утверждали: “У кроссфайра высочайшая чувствительность -130 дбм, это в разы выше любых других систем РУ. Он способен извлекать сигнал из-под уровня шумов!” Всё верно, с одной только оговоркой: подобная чувствительность обеспечивается при очень низких скоростях передачи данных. А низкие скорости передачи данных ведут к большим задержкам, что для рейсеров неприемлемо. Чтобы обеспечить низкие задержки (в режиме race mode) кроссфайр вынужден работать с высокой скоростью передачи данных, что сводит на нет все преимущества LoRa. И чувствительность становится той же самой, что у любых радиомодемов, работающих по протоколу FSK.
В конце концов, о чем вообще мы говорим? Это нонсенс, применять ЛРС для полетов в радиусе максимум 300 метров вокруг себя! На это расстояние можно летать вообще в принципе на любой нормально настроенной системе РУ, без дропов и фейлсейфов, в некоторых случаях вообще без антенн)) У меня был случай, когда я на приемник лрски 433 мгц забыл прикрутить антенну, вот как раз через 300 метров и опомнился, да и то только потому, что видел в ОСД уровень принимаемого сигнала в дбм и обратил внимание, что он аномально низкий. Если бы рейсеры не ленились, и хотя бы нормально расположили антенны приемника, обычного фрская, хоть того же R-XSR - на 3д печатных “рожках” под углом 90 градусов друг другу и 45 град к плоскости рамы, а не просто позволив им свободно болтаться, или тем более, как делают некоторые - прикрутив их изолентой к раме, то для 300м этого было бы более чем достаточно.
Ну, и наконец на закуску. Система кроссфайр оказалась настолько наспех созданной, и сырой, что даже
3. Волшебный режим маяка для поиска упавшего аппарата в кроссфайре не работает!
Он или не работает вообще, или работает крайне нестабильно. В 30 метрах от себя - да, пожалуйста. В “боевых” условиях, когда мне потребовалось найти аппарат, упавший в капустное поле в 1 км от точки взлета, маяк не сработал. Диверсити приемник отказывался переходить в режим поиска даже когда я подошел к нему вплотную. Писал об этом вот здесь: rcopen.com/forum/f90/topic199245/5448 По-крайней мере, так было на актуальных на тот момент прошивках (лето 2016). Как сейчас не знаю, но, судя по недавним роликам с ютюба на эту тему, особенно ничего не изменилось.
Стоит еще добавить, что TBS совершила дополнительное насилие над технологией передачи данных LoRa, прикрутив к ней усилитель на 2 вт. И это насилие над самим смыслом и сутью этого вида модуляции, т.к она изначально предназначена для передачи небольших объемов данных на огромные расстояния при очень небольшой излучаемой (и потребляемой, соответственно) мощности. Для интернета вещей, обмена данными с различными сенсорами и т.д. 2 Вт с этой точки зрения выглядят, опять же, как чисто маркетинговая уловка (не секрет, что большинство потребителей не вникает в цифры чувствительности приемников и усиления антенн, а руководствуется обывательским “мощнее - значит дальше!”).
Резюмируя, мы видим, что компания Team Blacksheep развела как последних лохов всё ФПВ сообщество, не удовлетворив потребности Long Range пилотов (для истинного лонг ренджа она вообще непригодна, а на 10 км можно и “на гвоздь” улететь), а рейсерам впарив абсолютно НЕНУЖНЫЙ им продукт по фантастической цене. Т.е это именно то самое грандиозное фиаско, о котором шла речь в заголовке поста. НИ ОДНУ из заявленных функций кроссфайр не выполняет. Вот буквально ни одну. Большие дальности? Нет. Чудо-система для рейсеров? Не лучше прочих. Маяк и тот не фурычит. В общем, ничего. А феномен заметной - грех это отрицать - популярности этой ЛРС основан на чисто маркетинговых трюках, которым, кстати, в целом обязан успех компании TBS, не производящей ничего особенно революционного. Они просто были пионерами в деле популяризации FPV.
Данный вывод - моё личное мнение. Насколько обоснованное - судить вам. С удовольствием выслушаю аргументы за и против, вместе посмотрим видео дальних полетов, совершенных с видео 1.2 ггц и кроссфайром и т.д. 😃
В этом посте постараюсь обобщить опыт, накопленный за несколько месяцев адской траханины с этим автопилотом применительно к коптерам и частично к самолетам (в части спонтанных дизармов в основном) 😃 Теперь о приколах этой прошивки я знаю кажется почти все 😃 Кому-то этот опыт - уверен - поможет сберечь аппарат, тем более, что не все читают профильные ветки форума.
Итак. Запаситесь терпением, писанины будет много.
1) Дизармы в воздухе во время RTH или фейлсейфа.
Происходят они чаще всего потому, что разработчиками (на прошивках 1.8.х - 1.9.х как минимум, дальше возможно пофиксят) ряд критичных параметров оставлен в такие значения по умолчанию, что дизарм во время возврата домой по потере связи или RTH неизбежен, и это нормальное и ожидаемое поведение. В полном соответствии с буквой мануала. Чтобы это не происходило, надо зайти в CLI и написать:
set failsafe_throttle_low_delay = 0
set failsafe_off_delay = 0
set failsafe_throttle = сюда надо вписать значение канала газа в микросекундах, при котором ваш аппарат мягко садится/планирует. Т.е если висим при 1350 мксек газа, то вписываем скажем 1200. По умлч здесь стоит 1000, при таком газе коптер камнем упадет вниз
set failsafe_procedure = RTH //строго говоря, предыдущие три параметра относятся к процедуре фейлсейфа SET-THR, но есть подозрение, что они имеют влияние на спонтанные дизармы даже если выбрана процедура RTH, поэтому на мой взгляд лучше подстраховаться
set nav_emerg_landing_speed = 200 //это значение скорости снижения в см/сек на случай, если во время выполнения процедуры фейлсейфа отказал GPS или прочие необходимые сенсоры, посадка выполняется под контролем барометра. Кстати, вопрос, какая процедура будет применена, если в процессе экстременной посадки отказывает барометр, остается, по-моему, открытым))
disarm_kill_switch = OFF
Потом не забыть выполнить команду save для применения настроек. Еще есть сообщения о произвольных дизармах в воздухе просто в полете, не во время RTH или фейлсейфа. Очень похоже, что связаны они с глюком чтения SBUS, когда аппарат как бы выполняет команду на дизарм килл свичем на соотв. канале, хотя такой команды ему никто не давал. Именно поэтому мы и отключаем дизарм килл свитч. Арминг/дизарминг лучше производить только командой левого стика. Да, failsafe_throttle устанвливайте только тогда, когда будете ТОЧНО знать, при каком значение канала газа в мксек у вас висит коптер. При первых подлетах я сдуру решил, что он у меня висит ровно в середине газа, т.е при 1500, и поставил 1350 мксек, а коптер был сильно недогружен и висел при 1280 примерно. В результате конечно я поймал фейлсейф, и коптер подорвался в небо)) Пока я метался по земле и соображал, что делать, высота уже была 500 метров. Пришлось его дизармить там. Итог - красивые дрова 😃 Не повторяйте моих ошибок!😁
2) Настройка режима ALTHOLD и проблемы с ним связанные.
Обнаружил, что для нормального удержания высоты все-таки удобнее включить настройку nav_use_midthr_for_althold = ON, при котором удержание высоты будет происходит при среднем положении стика газа, при этом в переменной nav_mc_hover_thr указать значение канала газа в мксек при котором коптер висит в режиме ANGLE. (это можно выяснить по логам блэкбокса, или пересчитать процент газа видимый в OSD, куда его можно вывести, в микросекунды вручную) Это всего лишь подсказка для полетника, если указать не очень точно, при включении ALTHOLD коптер будет проваливаться или подрываться вверх. Если газ висения указан корректно, а коптер все же проваливается/подрывается вверх, нужно увеличить ПИД nav_mc_vel_z_i. По дефолту он 50, поставить для начала 60 и посмотреть. Если не хватает и провалы/подскоки все еще есть, еще немного добавить.
В переменной thr_mid нужно указать газ висения в процентах, если висим при 40%, пишем
set thr_mid = 40
save
Это нужно для корректной отработки кривой экспоненты газа, чтобы ее плоский участок приходился как раз на точку, где висит ваш аппарат. Иначе столкнетесь с тем, что при линейном добавлении/убирании газа ваш аппарат будет набирать/терять высоту с остановками и ускорениями не совсем там, где вы ожидаете 😃
3) Баг с автоматическим определением магнитного склонения.
Обнаружил, что автоматическое определение магнитного склонения в прошивках 1.8-2.1.0 работает некорректно (upd. в прошивке 2.2 этот баг должен быть поправлен), в результате чего коптер летит не по прямой, а забирает около 10 градусов левее по яву (в Москве). Если у вас наблюдается такое, выполните следующие команды:
set inav_auto_mag_decl = OFF
set mag_declination = 1020
save
1020 - это 10.2 градуса для Москвы (для вашей страны/города значение будет другим!), формат записи в CLI именно такой. Чтобы ничего не напутать, можно указать склонение в GUI прямо в градусах. Т.е вписать 10.2 в соотв. поле.
4) Если у вас не гоночный мини-коптер, не включайте AIRMODE! (upd. в прошивке 2.2 этот баг должен быть поправлен)
На аппаратах с ЖПС летающих блинчиком от него особенного толку нет, а вот если у вас коптер изначально очень легкий, т.е сильно недогружен для выбранной ВМГ и напряжения питания, а ПИДы высоковаты (даже стоковые могут оказаться слишком большими в некоторых ситуациях), то вы рискуете столкнуться с ситуацией, в которой оказался я. Осциллируя по всем осям и поддавая газу, мой недогруженный аппарат резвенько пошел в небо с явным намерением в нем скрыться. Пришлось дизармиться и падать, на этот раз всего лишь с высоты 10 метров. Дрова были еще красивее, чем в первый раз 😃 Причина такого поведения: клиппинг показаний акселорометра при слишком высоких вибрациях, вызванных дисбалансами или неисправностью ВМГ, или перепидовкой, как в моем случае.
5) На сладкое - слова про настройку ПИДОВ. Тема, которая волнует многих))
Итак. Для 450-го коптера весом около 1.2-1.3 кг с моторами 900 кв и пропами 9 дюймов (ВМГ от моего старого доброго Дискавери), летающего на 4S вполне подойдут дефолтные пиды, останется лишь немного их донастроить. Все настройки ПИДов должны происходить в режиме ANGLE без включенного ALTHOLD и без подключенного GPS и компаса.
Полезные хинты:
- если аппарат вяловато реагирует на команды по питчу и роллу, увеличивайте соответствующие P. Если при резком подрыве стиком газа коптера вверх начинаются осцилляции, соответствующие P нужно будет чуть уменьшить. Обычно их увеличивают именно до момента начала осцилляций просто в висении, потом уменьшают на 10-15%. Однако мне кажется, что если у вас коптер для спокойных полетов “блинчиком”, так остро настраивать нет нужды.
- если при висении в спокойном воздухе аппарат немного покачивается с частотой 0.3-1 гц (т.е медленно), то скорее всего дело в недостатке P, и надо его поднимать.
- набрав высоту с запасом, стиком газа “роняете” коптер вниз. Если началась болтанка при прохождении через возмущенный пропами воздух, нужно поднимать I до момента, пока эта болтанка или не пропадет совсем или не станет приемлемой. На коптерах с большими пропами полностью от нее не удастся избавиться, имейте в виду.
- подвесив коптер на комфортном расстоянии от себя, резким движением правого стика “дергаете” его по соответствующей оси, по роллу например, и сразу же бросаете стик. Если коптер выравнивается не в одно движение, а совершает несколько затухающих колебаний, нужно поднимать соответствующий D, до тех пор, пока возврат в горизонт не будет происходит в ОДНО движение.
6) Настройка пидов навигации
Наконец в голове появилась ясность и в этом вопросе 😃 Делюсь. В мануале эта тема практически не освещена, описания параметров ясности не вносят, поэтому опишу простыми словами полученный опыт, который привел к тому, что сейчас в режиме удержания позиции POSHOLD и режиме реакции на стики CRUISE (когда правый стик контролирует не пространственное положение коптера, как в ANGLE, а скорость перемещения в соотв. направлении). В режиме реакции на стики ATTITUDE все просто, т.к в нем при горизонтальных пролетах коптер не удерживает позицию и не контролирует вектор перемещения, а просто на время отключает удержание позиции. Мне было интересно настроить адекватную реакцию именно в режиме КРУИЗ, т.к в нем коптер летает как НАЗА, а она в режиме жпс летает близко к идеалу, плавно и предсказуемо 😃
Рассуждать буду в терминах POS и POSR - т.е так, как соотв пиды (nav_mc_pos_xy и nav_mc_vel_xy) называются в OSD. Итак.
Логика пида POS P такова: это скорость (сила, если хотите) с которой коптер пытается исправить ошибку в своем положении в пространстве. Ошибка бывает двух видов: от внешних воздействий, например когда коптер сдувает ветром и когда пилот дает команду двигаться куда-либо. В этом случае коптер просчитывает новое положение, а затем начинает стремиться к нему с “резвостью”, определяемой этим пидом. Т.е проще говоря, это скорость реакции на команды правым стиком. Если у вас коптер резковато реагирует на такие команды, то этот пид надо уменьшать. Имейте в виду, если реакция на команды правым стиком слишком резкая, то этот пид нужно уменьшать. Он же влияет на поведение коптера в навигационных авто-режимах, т.е например при возврате домой. Если во время RTH коптер устремляется домой слишком резво, и вдобавок еще перелетает точку дома, а потом начинает ее судорожно “искать”, циллируя вокруг нужного положения, то опять же нужно уменьшать этот пид. Значения около 15-30 чаще всего оказываются приемлемыми. У меня он сейчас установлен в 15.
Теперь о логике пида POSR P. Что бы там ни было написано в мануале, но на самом деле этот пид отвечает за скорость и устойчивость остановки после команд правым стиком. Многие жаловались, что коптер не сразу останавливается, если “бросить” правый стик, а некоторое время летит в обратную сторону. Или наоборот, начинает осциллировать вокруг нужного положения. Если у вас такое происходит, то нужно настраивать этот пид. Причем сначала настройкой (скорее всего сильным уменьшением от значений по умолчанию) пида POS P надо добиться нормальной, плавной реакции на стики, а потом уже настраивать торможение после отпускания правого стика при помощи настройки пида POSR. В мануале указаны значения по умолчанию: 180, 15, 100 для P,I,D соответственно. (для версии 1.8, в 1.9 и выше значение P надо делить на 5.) После настройки у меня получилось 80, 15, 95. Возможно POSR P надо уменьшать еще. Но самое главное, что уже при таких значениях коптер наконец полетел нормально. Исчезли “дергания” по питчу и роллу во время горизонтальных пролетов на большой скорости, а остановка при отпускании правого стика стала происходить сразу же, без возвращений и осцилляций.
Т.е, резюмируя, на текущий момент для коптера 450 размера более-менее правильные навигационные пиды для прошивки 1.8 выглядят так:
POS P = 1
POS I = 80
POSR P = 80
POSR I = 15
POSR D = 95
При таких пидах коптер в посхолде летает стабильно, предсказуемо, и без дерганий.
upd. 03/08/2018 - указанные пиды неплохо работают с GPS модулем от назы, для более современных модулей они скорее всего не подойдут. Поэтому прилагаю обновленный вариант навигационных пидов для прошивок от 1.9 - 2.0 и выше, подходящих для современных модулей типа Radiolink TS100 mini или BN-880. С этими пидами вполне нормально летают коптеры с пропами от 9" до 15-16 (проверял лично). Для бОльших или меньших аппаратов они скорее всего тоже подойдут в качестве отправной точки, по крайней мере адовых фортелей при активации посхолда быть не должно 😃
Обновленные навигационные пиды:
POS P = 15
POS I = 100
POSR P = 25
POSR I = 20
POSR D = 40
upd. 23/05/2019 Разработчки айнава подтвердили наличие бага с автоматическим определением магнитного склонения. На текущей прошивке 2.1.0 он все еще есть, в следующих должны поправить. И я по-прежнему уверен, что режим POSHOLD CRUISE у коптеров забагован донельзя. Проблемы следующие: 1) неконтролируемое поведение коптера после разворотов по яву на 180 градусов. 2) этакие клевки или раскачка по питчу (и немного по роллу) при полете прямо. 3) Ощущение, что аппарат плохо контролируется командами правого стика аппы. Все эти проблемы не удается победить настройкой навигационных пидов. Наличие этих проблем подтверждено уже из нескольких источников, но обратной связи от разработчиков пока нет по опубликованным баг репортам. Будем ждать. Пока же не рекомендую летать в этом режиме.
Он же - Boscam 5802 и аналогичные. Проблема заключается в том, что через пару лет эксплуатации сдох встроенный литий-полимерный аккумулятор, и заряда стало хватать буквально на 15 минут работы, в то время как раньше монитор работал 1-1.5 часа на одном заряде. Решил озаботиться заменой акка. Разобрал монитор. Внутри оказался литий-полимерный аккумулятор 2S 2350 мАч, размерами 40 на 85 на 12 мм, состоящий из двух ячеек и платы защиты. Нужно было подобрать ему аналог по размерам и емкости. Аналог нашелся вот тут: www.chipdip.ru/product/robiton-lp604374 Покупаете два таких, отпаиваете их платы защиты, оставляя только ячейки. От старого аккумулятора из монитора отпаиваете его плату защиты, после чего необходимо припаять к ней новые ячейки, проложив между ними полоску двустороннего скотча. Далее на такую же полоску крепите акк внутри корпуса и вуаля. Цена вопроса в чипидипе - 400р. за акк, но можно найти и дешевле.
На этот раз 100% 😃
upd. Еще раз на случай неустранимых сомнений. Коптер питается только от батарей. Емкость батареи 22А/ч.
В планах постройка очередной версии дальнелета, который будет способен достигнуть удаления около 40 км.
Подробности в следующем посте 😃
Снимал летом 2015-го с помощью DJI Phantom 3 Pro. Монтаж Final Cut Pro X, покраска в нем же с помощью Color Finale. LUTы не использовал, цвет выводил кривыми.
В ролике показано преимущественно северо-восточное побережье Сардинии, от Santa Teresa di Gallura на севере до Budoni на юге, включая заповедник олигархов Porto Cervo и пляж Liscia Ruja, на рейде напротив которого торчат олигархические яхты))
Мое мнение о Сардинии таково: лучшего моря НЕТ во всей Европе. Такой концентрации пляжей, вызывающих восхищенный вздох, я не видел нигде! Лазурный берег Франции отдыхает
Когда я задумал построить эту антенну, под рукой были: 1) Г.но 2) Свист 3) Один час времени 😃 В переводе на понятный язык это звучит иначе: несколько листов тонкой потолочки, пищевая фольга, кусок пластиковой трубки сантиметров 12-ть длиной, обрезок медной трубки длиной 8 см, медная проволока диаметром 2.5мм, ну, и конечно кусочек коаксиального кабеля с уже обжатым SMA разъемом. В хозяйстве фпв-шника обычно все это добро так или иначе валяется.
Теперь о том, для чего мне это потребовалось. Есть у меня LRS от Team Blacksheep, Crossfire называется. Отличная во всех отношениях система на немного нестандартный диапазон 868 мгц. Кстати, те из вас, кто планирует использовать данную антенну для приема видео 1.2 или 2.4 ггц, или подключить ее к аппе на 2.4 ггц вместо бустера (известно, что лучший усилитель - антенна) могут смело продолжать читать дальше, т.к антенна элементарно пересчитывается на эти частоты 😃 К слову сказать, дальность аппы с такой антенной вырастет более чем в 2 раза.
Итак, Crossfire. Построена эта LRS на LoRa чипе, который в числе прочего умеет вытаскивать полезный сигнал из-под уровня шумов. Вот я тут слетал на 14км на квадрике, просто в порядке теста. Причем еще и на высоте всего порядка 100 метров. На приеме и передаче были простые диполи.
Обратите внимание на уровень сигнала (правый нижний угол экрана) на максимальном удалении. -118 дбм - и система еще вполне работоспособна! Ну, да не об этом речь. Речь о том, что эта LRS умеет слать на землю телеметрию, в том числе и сквозной канал MavLink (или эмулировать его, если мозги не APM-совместимые), но “передатчик в приемнике” у нее маломощный, всего 30 мВт. На 15-20 км в чистом эфире этой мощности вполне хватит, но после модернизации коптера с помощью одного очень хорошего человека с золотыми руками 😃, запас дальности полета значительно вырастет. До 30км железно, а скорее всего и до 35-40. Ибо 1.5 часа полетного времени, как говорится, решают.
И вот для того, чтобы принимать 30 милливатный сигнал на таком удалении, мне и потребовалась направленная антенна с приличным усилением. Городить патч, а тем более яги, не было ни времени, ни желания. Покупать готовое тоже не хотелось, т.к на этот диапазон оно или редкое, или громоздкое и тяжелое, или имеет негуманный ценник. Перебрал несколько вариантов, остановился на антенне Харченко. В терминах буржуев BiQuad.
Вот здесь: www.rcgroups.com/forums/showthread.php?t=1328260 в первых нескольких постах есть инструкция от IBCrazy на английском, с картинками. Там же и формулы, как посчитать все необходимые размеры. Кому нужно, прекрасно переводится гуглом. Но там больше о том, как построить приличную антенну. Меня же интересовая трешовая ее модификация в духе незабвенного Shuricus’a, чтобы “из кой-чего и с торчащими проводами”)))
Забегая вперед, покажу, как выглядит результат 😃
Для постройки такой антенны необходимо посчитать всего несколько величин:
Полная длина волны в см = 29800/f в Мгц
Длина секции в см = четверть волны или 7450/f в Мгц
Расстояние между активным элементом и рефлектором в см = 1/8 полной длины волны или 3725/f в Мгц
Для 868 мгц у меня получилось: 34.3 см, 8.6 см и 4.3 см соответственно. Полная длина волны относится к размерам рефлектора (квадрат со сторонами такой длины) и длине проволоки, из которой будем выгибать “бабочку”. Длина секции, соответственно, сторона “бабочки”. Ну, а третий параметр в объяснении особенно не нуждается. Размер рефлектора, конечно, внушает, все-таки 34 см. В принципе, его можно было сделать меньше, вплоть до размера, чуть большего самой “бабочки”, потеряв в усилении всего 2-3 дб. Я не эксперт по антеннам, знатоки пусть поправят. Читал, что это так.
Теперь о процессе изготовления антенны. Листы потолочки я вырезал канцелярским ножом и склеил просто двусторонним скотчем. Получился “бутерброд” толщиной около 2см. Можно меньше, можно больше, кому как фантазия подсказывает. Но если сделать меньше, не будут держаться стойки по углам бабочки и медная трубка, сквозь которую пропущен коаксиал. Далее рефлектор обклеивается несколькими слоями пищевой фольги. От лени я ее тоже на скотч посадил. Поверхность получилась не идеально ровной, но на параметры антенны это сильно не влияет, насколько я знаю.
Дальше берем проволоку, отрезаем кусок длиной ровно в ДВЕ нужных вам длин волны. Отмеряем очень точно, именно в этот момент определяется, попадете вы в нужную частоту и канал или нет! Именно здесь у антенны будет резонанс. Второй настраиваемый параметр - расстояние до рефлектора определяет только импеданс антенны на этой частоте, или, проще говоря, КСВ. Знатоки и эксперты могут сколько угодно витийствовать в соответствующих темах, но настройка по КСВ у Харченко осуществляется именно изменением расстояния “бабочки” до рефлектора 😃 Проверено лично.
Размечаем отрезанный кусок проволоки ровно на 8 одинаковых частей - секций, точно соблюдая рассчитанную ранее длину секции. Далее по этим меткам выгибаем “бабочку”. “Бабочка” должна получиться ровной и симметричной. Дальше берем медную трубочку, пропускаем через нее коаксиал и припаиваем центральную жилу и экран к центру “бабочки”, как на фото. Один угол “центра” к экрану, второй к центральной жиле. Контакта между ними быть не должно! Экран коаксиального кабеля в свою очередь припаиваем еще и к трубочке. Длину трубочки нужно выбрать такой, чтобы хватило на расстояние между бабочкой и рефлектором, плюс толщина “бутерброда” из потолочки плюс запас в 1 см, т.е итого 4.3+2+1 = примерно 7.3 см. Длину пластиковых трубочек, которые подпирают концы “бабочки”, выбираем по тому же принципу.
Проделываем отверстие по центру рефлектора и под краями “бабочки”, где должны стоять подпорки. Если возьмете потолочку, то лучше не сверлить, а продырявить просто отверткой или шилом и немного разболтать, т.к потолочка крошится. Ну, и наконец вставляем пластиковые подпорки и медную трубку с припаянной “бабочкой” в отведенные им места 😃 Убеждаемся, что “бабочка” расположена точно параллельно поверхности рефлектора, и что все ее части находятся на одинаковом от него расстоянии, у меня это 4.3 см.
Теперь берем приборы и приступаем к настройке. Если есть лампочкотестер - пойдет, если есть настоящий анализатор антенн - еще лучше. Но Харченко тем и хороша, что очень толерантна к качеству и точности изготовления. Достаточно примерно (плюс минус 1-2 мм) соблюсти указанные размеры, и антенна автоматически окажется настроенной на нужную частоту. Именно это я и сделал. И только потом проверил результат на анализаторе. Получилось вот что:
Первая картинка - КСВ. Вторая - диаграмма Смита. С ее помощью проще всего понять, где сопротивление антенны становится чисто активным, т.е где у нее резонанс. Как видим, получилось не ровно 868 мгц и не точно 50 ом, а 866 мгц при КСВ 1.1, и 47.38 Ом на частоте 871.6 (здесь у нее резонанс). И это очень и очень неплохо, учитывая, что делалось все из говна и свиста и к тому же на коленке))
Теперь несколько слов о важном. О поляризации и усилении. Поляризация этой антенны линейная. Если “бабочка” расположена горизонтально, то она вертикальная (что и требуется в большинстве случаев). Если расположить ее вертикально, то поляризация будет наоборот, горизонтальной. Усиление же, расчетное, должно быть около 10-11дб при ширине ДН в горизонтальной плоскости градусов так в 60 (что не требует суперточного наведения на цель). Что там получилось на практике, покажет только реальный полет. Не думаю, что сильно хуже теоретического.
Настроив антенну (или просто установив “бабочку” на нужном расстоянии от рефлектора), фиксируем трубочки кому как подсказывает фантазия. Я - страшно ленивый тип, поэтому просто залил все термоклеем 😃 Тем же способом фиксируем концы бабочки на подпорках.
Далее мне оставалось только изготовить удобное крепление этой конструкции на ретрансляторе РУ, для чего потребовались два мебельных уголка и два нейлоновых болта соотв. длины с гайками. Со стороны рабочей поверхности рефлектора под головки болтов рекомендую подложить шайбочки хотя бы 2 на 2 см из пластика или картона, чтобы при затяжке гаек не продавить фольгу и потолочку.
Вот и все. На изготовление антенны и креплений ушло меньше времени, чем на написание этого поста 😃 Повторяйте, чморите меня отписывайтесь в комментах. У меня все работает идеально. Сильно далеко пока не летал, но 3 км при мощности передатчика кроссфайра в 10 мвт она дает железно.
P.S: Да-да, коаксиал так гнуть нельзя! Пайка - дерьмо! И тем не менее, антенна работает и работает весьма прилично 😃 Задача в том и состояла, чтобы сделать “хорошо” кривыми руками…
P.P.S для обладателей Кроссфайра: такая антенна пригодится еще и при поиске упавшего аппарата, т.к диверсити приемник работает еще и как маячок, передавая последние координаты. И дальность приема увеличит, и направление на маяк поможет точнее определить.
upd. 08.08.2016. Кстати, небольшое добавление по КУ данной треш-антенны. На днях имел возможность сравнить. Дальность 1.5 км, мощность передатчика кроссфайра 500 мвт (пытался выловить некие косяки, поэтому так много). Один полет был с диполем на передатчике LRS, второй с моей треш-харченко. Так вот, разница в уровне принимаемого сигнала оказалась как раз 11 дбм. Вот ровно, тютелька в тютельку 😃 Так что все параметры соответствуют заявленным.
Пруфы:

Этот пост для тех, кто по тем или иным причинам чувствует необходимость воспользоваться программами, которые имеются в сторонней ОС и отсутствуют в рабочей. Например, мой конкретный случай: рабочая система у меня на всех компьютерах (Маки) - OS X 10.11 El Capitan, Windows когда-то была на десктопе, но потом каким-то образом самоликвидировалась 😃 А необходимость в ней сохранилась. Naza Assistant запускать или софт от Черной Овцы - TBS Agent, для настройки и обновления прошивок их продуктов. Да мало ли еще какие потребности могут возникнуть.
Способов кроссплатформенной эмуляции существует множество. Я одно время пользовался такими программами как CrossOver и PlayOnMac, основанными на платформе Wine и являющимися фактически ее надстройками. Геморроя с ними было куча, т.к что-то постоянно не работало. То .NET Framework не устанавливался, то шрифтов не хватало. Какие-то программы просто были несовместимы с Wine и не запускались даже после обстоятельных танцев с бубном. Назревала необходимость в полноценной виртуальной машине, но ставить систему с нуля ломало ужасно. И вот наконец нашлось простое, а главное быстрое решение 😃
Выглядит оно так:
- Идем на сайт www.virtualbox.org/wiki/Downloads и качаем VirtualBox для своей рабочей системы. В моем случае - для OS X.
- Идем на сайт dev.windows.com/en-us/microsoft-edge/…/mac/ и качаем нужный образ винды (если нужна винда), выбрав свою рабочую систему. Я скачал IE8 on Win7. Там поддерживаются Win, Mac и Linux. Если нужно что-то другое, то ищем готовый образ нужной системы в формате VirtualBox (*.vmdk).
- Устанавливаем VirtualBox, далее в Finder’e распаковываем скачанный образ системы и просто дважды кликаем на файл с расширением *.ovf. Запустится процесс импорта виртуальной машины. (Это важно! Готовый образ нужно именно импортировать, а не создавать новую ВМ и потом пытаться к ней подключить скачанный образ). По окончании импорта запускаем установленную ВМ. Если надо, меняем ее настройки под свои нужды. Там не сложно.
- Наслаждаемся 😃
Весь процесс занимает буквально 10 минут, а пользы от него нереально больше. Во всяком случае, так было у меня 😃
Писать буду максимально простым языком, по принципу “что вижу - то пою”. Прошу не пинать, а если есть что поправить/дополнить - отмечайтесь в коментах. Речь идет вот примерно о таких разъемчиках:

Отличаются они только числом контактов. В ФПВ используются много где. Посредством них подключаются камеры, передатчики, ОСД, телеметрия всяческая, радиомаяки наконец - в общем, много чего. Поэтому потребности в заделке таких коннекторов возникают часто, т.к кабели, что шли в комплекте с различными девайсами, частенько приходят в негодность, прое…тся теряются и так далее. Иной раз требуются и кабели нестандартной длины.
В решении этой проблемы существуют два пути:
-
Пойти в “эти ваши энторнеты” и купить там уже готовые, заделанные. В нерезиновой, к слову, найти что-то подобное не удалось. Зато на Алиэкспрессе, Ибее и Бэнгуде этого добра в изобилии. Здесь, например: www.ebay.com/itm/191448968652
-
Можно пойти сложным путем и обжать разъемчики самому. Этот путь чреват геморроем и более существенными финансовыми тратами, зато проблему решает радикально. Собственно, я его прошел, поэтому делюсь 😃
Что нам потребуется:
- Розетки на кабель. В чипидипах и им подобных магазинах, включая различные онлайновые типа Mouser, розетки имеют part number 51021-400 - и прекрасно ищутся поиском. Это четырехпиновые. Контакты покупаются, как правило, отдельно. С другим количеством пинов меняются последние цифры после дефиса. Разберетесь, думаю.
- Еще потребуется кримпер. В магазинах вам будут нагло врать, что такие пины прекрасно обжимают китайские кримперы для D-SUB. Не верьте, это ложь 😃 Пины слишком маленькие. Для их обжима существуют фирменные решения от самого Molex’a, но стоят они совсем не гуманно, и для нашей любительской практики в принципе бесполезны. Мне удалось найти более бюджетное, хотя и все равно недешевое решение. Называется оно YAC-12 и в мск стоит около 2500 рублей. В основных радиомагазинах имеется. Что касается цены, то тут курс виноват, конечно. Но от братьев китайцев получится все равно в р-не 40-50 долларов. Плюс ожидание, так что решайте сами.
- Наконец, нам потребуется умение 😃
С последним было особенно туго. Я пинов 20-25 перепортил, прежде чем получилось сносно)) Так что пины берите с запасом.
Теперь о процессе обжима. Описать его словами довольно трудно, но вкратце так: снять с провода изоляцию миллиметра на 2-3. Насадить на него пин. Далее попытаться засунуть всю конструкцию в кримпер, чтобы она не развалилась 😃 С непривычки это очень трудно, поскольку пин весьма мелкий. Или можно сначала засунуть пин в кримпер, и, совсем легонько сжав его, зафиксировать от выпадения, а потом уже вставлять провод. У меня лучше получалось первым способом, хотя правильнее было бы воспользоваться вторым. Сразу даю хинт: пин состоит из двух частей, та, что является контактом, в который будет входить ответная часть (вилка) и та, что должна обжимать провод. Так вот, при обжиме внутри губок кримпера должна оставаться только вторая часть пина, т.к в противном случае вы расплющите сам контакт. Если с первого раза не получилось надежно зафиксировать провод в пине и вышло некрасиво, то не стесняемся, аккуратно пробуем еще. При необходимости пользуемся тонкогубыми пассатижами. По достижении удовлетворительного результата не забываем вставить заделанный пин в розетку 😃
Вот тут есть видео-инструкция:
Я, правда, из нее не особенно много понял, но вдруг кому окажется полезной…
Ну, а вообще отписывайтесь о собственном опыте. Мой не претендует на оптимальность 😃
Впечатления получил двойственные. С одной стороны фильм снят очень здорово. Спецэффекты на высоте, динамика действия не дает оторваться ни на секунду, отлично выдержана оригинальная стилистика предыдущих частей саги… но вот все остальное, как бы это сказать 😃 С этого места предлагаю не читать тем, кто еще не смотрел фильм, но собирается это сделать. Дабы не поколебаться в вере в Светлую сторону Силы этом желании 😃
Сюжет фильма я пересказывать не буду. Да его по сути и нет. А то, что есть, является суровой и бескомпромиссной калькой с 4-го и 5-го эпизодов 😃 И вот вам пара примеров. Действие начинается на какой-то пустынной планете, где ветер веет на ржавыми останками гигантских механизмов, а под слоем песка скрываются разнообразные (и очень злые) пустынные твари. То там, то сям торчат всем хорошо знакомые силуэты испарителей, с помощью которых фермеры добывают из атмосферы влагу… Татуин, подумали вы? Нет, это некая планета Джакку. На эту планету попадает хорошо законспирированный повстанец, который имеет флешку с некими секретными планами повстанцев, которых в русском переводе фильма почему-то все время именуют “сопротивленцами” 😃 (интересно, а в оригинале слово “rebels” тоже заменили на что-то другое? По причине того, что оно вдруг стало неполиткорректным в связи с Сирией или еще чем-то подобным? Или это просто перевод такой дебильный?) Затем появляются штурмовики, которые охотятся на повстанца. Дальше всех убивают, а повстанец прячет флешку в дроида и велит ему бежать в пустыню, чтобы его не нашли. Повстанца берут в плен и пытают, а дроид после скитаний по пескам попадает к бедной девочке, которая живет в пустыне и собирает всякий хлам. С целью защиты от палящего солнца девочка хорошо закутана в разнообразные обноски, но при этом икры ног у нее почему-то никак не защищены. Видимо, не жалко. Зря - икры хорошенькие, стройные 😃 Да, девочка работает за еду, то есть выменивает собранный металлолом на так называемые “пайки”. Но бедная она не только поэтому. Во-первых, ее родители были то ли убиты, то ли угнаны в рабство, и она ждет их возвращения. Во-вторых, она живет с ощущением того, что создана для чего-то большего, чем собирание мусора. Забегая вперед, скажу, что здесь она оказывается права, т.к потом встречает любовь всей жизни - бывшего штурмовика-сантехника (мусорщица и бывший сантехник - сладкая парочка! Что это было?? WTF?!) Вскоре девочка узнает, что дроид-то, оказывается, с секретом, в результате чего оказывается вовлечена в масштабные события. Впоследствии, понятное дело, она обнаруживает в себе Великую Силу 😃
Дальше стало хуже. Ощущение дежавю окончательно перестало меня покидать. В фильме появились: грустная и унылая копия Дарта Вейдера, в убогой маске, под которой скрывается носатый молодой человек с лицом, которое больше подошло бы Раскольникову. Появились все старые герои: старичок Хан Соло со старичком Чубаккой, по прошествии стольких лет так и не бросивших свой рискованный бизнес. Естественно, что они оказались в долгах сразу перед несколькими конкурирующими бандами 😃 (привет, Джабба Хатт!) Появилась старенькая принцесса Лея со знаменитой баранкой из волос на голове. Головокружительной карьеры она не сделала, т.к не нашлось подходящего королевства с вакантным троном, поэтому она так и не бросила руководство повстанцами и поныне является их Генералом. Появилась какая-то бабушка, подозрительно напоминающая Йоду. Появилась сильно увеличенная копия Императора во всей своей красе, т.е в шрамах, складках и без капюшона. Он теперь возглавляет не Империю, а переименованную в Первый Орден ее реинкарнацию. Наконец, нам была явлена повзрослевшая до целой планеты копия Звезды Смерти.
Дальше вся эта шобла активно борется друг с другом, временами подшучивая и подтрунивая на собой. Сценаристам, над которыми режиссер очевидно был не властен, было лень написать нормальный сценарий, который привнес бы что-то новое в сагу, и они ограничились лишь перелицовкой и адаптацией сценария 4-го эпизода. А актерам и режиссеру, видимо, ничего не оставалось, кроме как стебаться над всем происходящим. Фильм пропитан стебом, который отлично виден во всем: в образах, в ситуациях, в диалогах персонажей, наконец.
Приведу несколько примеров.
Тысячелетний Сокол все еще летает и делает это хорошо. Настолько хорошо, что оказывается способен затормозить со сверхсветовой скорости прямо в атмосфере планеты. Над ним по-прежнему прикалываются все, кому не лень. “Как, этот хлам все еще летает?” 😃 Да, в какой-то момент у Хана его угнали. Потом у этого кого-то еще кто-то угнал Сокола. Потом еще раз. Наконец в результате хитроумной комбинации Хан попадает на борт Сокола и восклицает: “Чуи, мы дома!” (одна эта фраза многого стоит, гыгы)
Носатый человек Кайло, олицетворяющий Вейдера, молится в одиночестве на обгорелый череп в шлеме самого Вейдера и просит отвратить от Светлой стороны Силы, которая его искушает. (WTF??!!)
Или взять диалог, который последовал за встречей Леи и Хана. “Ты все генералишь? О, Хан, ты все еще жив? По-прежнему приторговываешь? Да, все так же не могу усидеть на месте. Вот этим ты меня всегда и бесил…” Не дословно, но смысл такой.
Девочка - по совместительству будущий Джедай, пытается подчинить разум охранника-штурмовика. Тот сначала над ней ржет, а потом внезапно подчиняется.
Наконец, шедевральная сцена гибели Планеты Смерти. Все начинает взрываться, на мостике пункта управления Имперскими орденскими силами возникает паника, один из лейтенантов бросается бежать. Ему вслед кричит генерал: “Немедленно остановись! Приказываю оставаться на своем посту!” На что лейтенант заламывает руки и философски восклицает: “А смысл?! Они победили! Мы все умрееем!” После чего все-таки бросается бежать. И таки умирает. Но в нескольких десятках метров от мостика.
И так далее. Пародийность, аллюзии и стеб во всем. Как в незабвенных “Космических яйцах”. Или “Космобольцах”, как их еще называли 😃 Если в предыдущих частях еще присутствует драматургия и, собственно, сама драма, то здесь всего этого попросту нет, словно в основу сценария лег фанфик какого-нибудь прыщавого пятнадцатилетнего фаната саги.
Нужно ли смотреть эту часть? Наверное, да. Все-таки снято качественно, тут не поспоришь. Да и ради галочки тоже. Но не ждите от фильма слишком многого - я предупредил 😃 Это такой своеобразный tribute со стороны J.J.Abrams в адрес G.Lucas, в котором пафос местами превращается в откровенный фарс 😉
Вот собрал более менее все краши с непосредственным участием моего коптера, что произошли на пути покорения отметки в 20+ км… получилось довольно забавное видео 😃
Ну вот, привел в порядок хозяйство 😃 Установил последние приобретения: ЛРСку TBS Crossfire, GPS/Glonass модуль для назы и зеленый маяк Тигромуха. Полный полетный вес - 2700 грамм. Теоретический предел дальности 28-30 км. Теоретический потому, что пока еще не проверил его на практике. Но за этим не заржавеет. А вот так выглядит полетное хозяйство, включая пульт, репитеры видео и РУ, ну, и сам рекордсмен 😃
После вот этого поста rcopen.com/blogs/2115/20627 Кирилла Уборского загорелся я желанием приобрести моноколесо 😃 Оно же - самобалансирующийся электрический уницикл. Во-первых, развлечения ради, а во-вторых, пользы для. В смысле, чтобы почаще на свежем воздухе бывать. Поначалу думалось, что и некий фитнес-компонент будет, но потом выяснилось, что кроме периода обучения, когда пот катит в три ручья, фитнеса в моноколесной теме ровно ноль. После подробного изучения вопроса было приобретено вот такое колесико, Ninebot One E+:


За подробными характеристиками велкам на сайт производителя, но вкратце так:
- Скорость до 20-22 км/ч
- Номинальная мощность 500 Вт (пиковая 1500 Вт)
- Запас хода на одной зарядке - 35км
- Вес ездока до 120 кг
- Соединение по блютус со смартфоном (андроид и эппл девайсы) для настройки и просмотра данных по поездке (скорость, пробег, остаток батареи и т.д.)
- Прикольный дизайн
- Рекуперация!!!
- В качестве источника энергии используются мои любимые литий-иончики. Емкость батареи у этой модели около 340 Вт/ч.
- Вес колеса - 14.5кг (это скорее минус, руки оно обрывает реально)
А вот как выглядит процесс езды на данном агрегате:
Решающим оказался вопрос цены. В Москве это колесо продается в среднем за 54000 рублей, что по курсу соответствует 850 долларам, в то время как во всем мире дешевле 950-ти его найти очень сложно. upd. Цене не пугайтесь, есть модели намного дешевле, но и попроще, естественно. Эта - вроде айфона в моноколесном мире, на что и дизайн как бы намекает 😃
Теперь кратенько о впечатлениях. Обучение езде у меня заняло примерно три полных часа. Во время него сам я не падал, а вот колесо падало, и не раз. В связи с этим лучше учиться на огороженной спортплощадке, где имеется пластиковая травка или резиновое покрытие. Меньше будет повреждений и царапин. К тому же весьма не лишней будет возможность держаться за ограждение 😃
Вкратце процесс выглядит так:
- Сначала учимся стоять на колесе, держась за подручные предметы (стену, ограждение спортплощадки и т.д)
- Потом учимся чувствовать его реакции на перенос веса на носки/пятки, что соответствует езде вперед/назад
- Затем пробуем переносить вес на диагонали педалей, что приводит к движению в соотв сторону с поворотом
- Учимся медленно ехать вперед, все еще держась за подручные предметы
- Отрываемся от поддержки 😃 Учимся становиться на колесо и начинать движение, ни за что не держась. Учимся останавливаться и спрыгивать без поддержки же.
- Дальше - кому как фантазия подсказывает. Тренируем повороты разного радиуса, движение с разной скоростью и т.д. Все, как на велосипеде, в общем 😃
Да! Совсем забыл! Прежде, чем учиться, советую приобрести защиту голеней. У меня вот такая: www.sportmaster.ru/product/1192096/ Надевается под штаны, снаружи почти не заметна. Защита нужна для того, чтобы внутренние стороны голеней не превратились в кровавую мозоль 😃 На них приходится до трети вашего веса во время поворота в ту или иную сторону. Попробуете, сами поймете. Без защиты я не выезжаю. По хорошему, нужен еще комплект роллерской защиты, но я езжу аккуратно и не очень быстро, поэтому пока без нее. Но подумываю купить, ибо я поборник ТБ 😃
На ютюбе есть много обучающих видео, например вот на этом канале: www.youtube.com/user/SpeedyFeetUK/videos
С какого-то момента, когда понимаешь принцип функционирования подобного рода агрегатов, процесс переходит в чисто интуитивную плоскость. Ты уже сам не понимаешь, каким образом управляешь данной шайтан-машиной. Она просто едет туда, куда нужно. Иллюзия, что колесо повинуется силе мысли - полная 😃 Через полчаса езды самому себе кажешься похожим на этакого кентавра, настолько “срастаешься” с данным транспортным средством.
Сегодня у меня идет третий по счету день езды на колесе. Процессу я посвящал по 2 часа вечером. Сегодня много катался по городу и лесопарковым зонам, в том числе и по местностям, свободным от асфальта и весьма пересеченным. Лес, травка, гравий, песок и т.д. Въезжал на горочки с нехилым уклоном (настолько нехилым, что не верится, когда оказываешься наверху), съезжал с них. Научился преодолевать лежачие полицейские, спрыгивать с бордюров и запрыгивать на них (пока только на относительно невысокие). До разряда акка до уровня 20% наездил 24 км, если верить данным родного приложения Ninedroid. Сказать, что доволен покупкой - значит, ничего не сказать 😃 Теперь можно кататься не только по городу, паркам, и прочим культурным местам, но и не отказывать себе в визитах в места значительно более сельские. На грунтовочки, к речкам ко всяким, холмам и прудам 😃 Штука очень компактная, места в машине занимает минимум. Кинул в багажник, доехал до конца асфальта, и айда развлекаться 😃 По итогам сегодняшнего опыта понял, что по пересеченке ездить значительно интереснее. Вот прям на порядок.
Еще очень прикольно народ реагирует. Основной комментарий: “Вау! Вот это здорово!”. Некоторые начинают расспрашивать, как, что, на чем летает ездит, сколько стоит. Есть даже анекдоты соответствующие. Точнее, истории из жизни.
Одному парню парнишка закричал: “Мужик, стой, куда поехал! Ведь это же еще не изобрели!!!” Или вот так: “Мама, мама, смотри, дядя на чемодане (пылесосе) поехал!!” )))
В общем, советую. Жаль только, что сезон подходит к концу 😃
Неофициальный, конечно, т.к официальной статистики не ведется. Теперь лучший результат 21.5 км, и запас еще есть. При некотором везении можно будет приблизиться к 27-30 километрам 😃
Видео полета:
Некоторые подробности описал тут: rcopen.com/forum/f123/topic345331/1913
А вот на что способен малютка Фантом 3 Про:
Он настолько крут, что даже не по себе как-то)))
Мало кто знает, но липа, следы от липких почек тополя, а также кровь и кишки насекомых, налипшие на кузов во время поездок по трассе, прекрасно очищаются обыкновенным нашатырем (аммиак) из аптеки, который стоит сущие копейки. При этом указанные загрязнения отходят без следов и с минимумом усилий. Больше не нужно протирать ЛКП до дыр 😃 и не нужно покупать дорогие средства в автомагазинах.
Результат промежуточный. В ближайшие дни попробую еще. Текущий сетап максимум 22 километра обещает. После фокусов (если они получатся), до 27-30км.
Барахлишко в квадрике такое:
Рама сейчас Тарот 650 Iron Man. От рамы skydiver’a отказался, ибо качество изготовления там отсутствует, как класс.
Движки: KDE 3510-475.
Регули: KDE 20A
Моск: Наза 2
ОСД: TBS Core Pro
РУ: EzUHF + яги 8 дб + диполи на приеме
Видео: 1.2ггц 400мвт + диполь + яги 13 дб с лавмейтом.
Вес барахла 3 кг примерно.
Ну, собственно, вот. 61 минута 44 секунды, за которые коптер налетал ровно 54 километра. И еще есть резервы по его облегчению, так что окончательный результат потенциально может быть еще улучшен. Таким образом, вплотную приближаюсь к дальностям, за которые не стыдно уже самолетчикам, а не только коптерофобам коптероводам 😃
Подробности полета описывал на форуме в теме Долголеты. Здесь приведу цитату, чтобы не повторяться:
Сегодня летал на другой батарейке, на этот раз липо. 22000 мАч она отдает при разряде током 5А, 21800 при разряде стандартными коптерными токами, можно посчитать, сколько это в среднем, но ориентировочно в р-не 19-21А. Разброса почти нет, т.е это весьма хороший результат.
Летал так же, и там же. 3км туда и обратно, и так до полного прифигения)) У земли был штиль, на высоте 70 метров ветер был четко вдоль трассы полета, 2-2.5 метра в секунду ориентировочно. Туда летишь максимум 50-53 км/ч, обратно 70-75… И это самым лучшим образом сказалось на результате: средняя скорость получилась 52 км/ч, что и дало вот такую немаленькую пройденную дистанцию. 440 мАч было скушано на предполетную подготовку, итого получилось 21405/54 = 396 мАч/км. Существенная экономия, и только из-за меньшего ветра, т.к вес батарейки точно такой же, как и у предыдущей.
Продолжительность полета составила 61 минуту 44 секунды. Реально руки устали держать пульт. Надо колхозить подставку какую-нибудь, или раскладываться для полетов по полной программе: стол, стул, напитки…
В общем, налетал 54 километра в итоге. Вовремя понял, что батарея близка к пределу, был у самой базы, в 10 метрах над землей, начал плавненько снижаться, но все же не успел. Пошла просадка по тяге, и коптер снова ухнул на землю самостоятельно Мягко так ухнул, снова обошлось без повреждений.
Теперь ломаю голову, какие выводы сделать из-за данного опыта… 54/2 = 27км и обратно, так, что ли, получается?)))
Довел до ума мобильную часть базовой станции 😃 Из оргстекла соорудил складывающийся кронштейн для крепления фпв-рекордера. Теперь все красиво, компактно и готово к работе буквально за секунды. А самое главное - мобильно! К тому же удобно расположенный рекордер может играть роль резервного ФПВ монитора, в случае отказа основного. Для этого достаточно кинуть кабель к ретранслятору, что занимает буквально секунды.
Upd. А самое главное, я теперь точно не забуду включить запись!!
Наконец дошли руки навести порядок в наземном хозяйстве 😃 Тем более, что с опытом эксплуатации предыдущей конфигурации наземки пришло понимание того, что мне нужно на самом деле, а без чего можно обойтись.
А нужно мне следующее:
- Запас по дальности действия. Поскольку я прицеливаюсь на 22-25 км - теоретический максимум дальности моего пепелаца в идеальных условиях, дальности действия видео-линка и РУ, на мой взгляд, должны быть минимум в 2 раза больше.
- Удобство и комфорт эксплуатации. В голове есть такая картинка: сижу я в кресле с бокалом чего-нибудь освежающего в цветущем саду или на веранде дачи, а коптер в это время на удалении 20 км, и препятствия на трассе распространения радиосигнала меня не волнуют 😃
- Презентабельный внешний вид, минимум проводов.
- Высокая скорость развертывания.
- Компактность при перевозке.
- Возможность летать в неблагоприятных метеоусловиях 😃 В холода, проще говоря. Управляя коптером из комфортного салона автомобиля 😃 И при этом иметь возможность пользоваться как монитором, так и очками.
Обойтись я могу:
- Без автоматического антенного трекера, от которого в целом больше проблем, чем пользы.
- Без поворотки по углу места, т.к она добавляет хлипкости в конструкцию наземки, а для дальних полетов, по сути, не нужна, т.к угол на коптер почти всегда будет порядка нескольких градусов. (однако ж иметь возможность поворота по азимуту было бы неплохо…)
- Без красивых кнопулечек и рычажков, показометров и прочих огонечков.
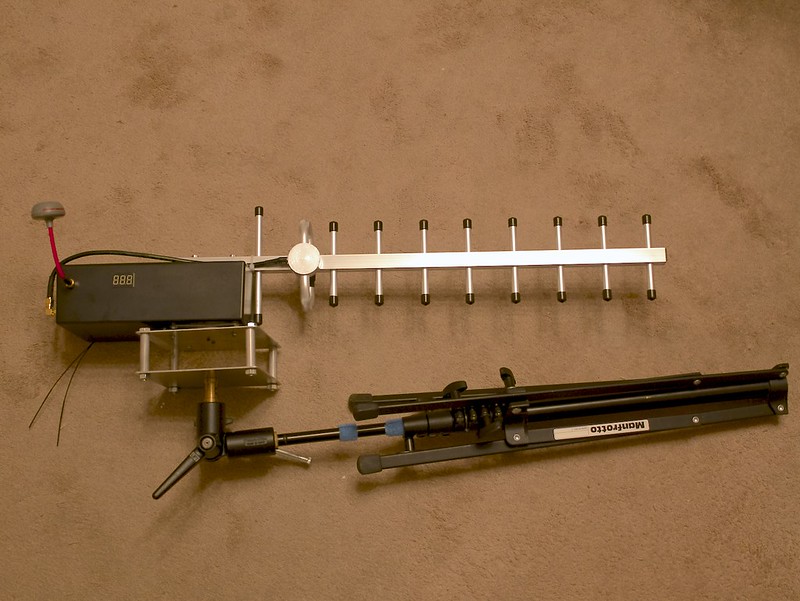
В итоге родилось вот это:


Данный девайс состоит из:
- Черного корпуса из чипидипа.
- Приемника Lawmate 1.2 ghz
- 4-канального сплиттера видео от RangeVideo www.rangevideo.com/43-video-splitter
- Мощной сервы, оставшейся от прошлого варианта моей наземки
- Алюминиевого основания и подшипника от поворотки AT-1000 Pro c сайта fpvpilot.com
- 13 дб яги 1.2 ггц, купленной здесь: www.readymaderc.com/store/index.php?main_page=prod…
- 5.8 ггц 0.5Вт передатчика TBS Boss (да, многовато для ретранслятора, зато был под рукой) team-blacksheep.com/products/product:109
- Липо-тестера (чтобы сразу видеть уровень заряда батареи - сильно экономит время при подготовке к запуску)
- Штатива манфротто высотой 2 метра.
- Приемника Graupner GR-24 для управления сервой (это вообще чересчур, но опять же, то, что было под рукой)
Питание включается зеленой кнопочкой, ретранслятор 5.8 ггц - красненькой 😃 На задней панели имеются выходы видео и разъем питания для внешнего монитора, если уж мне захочется подключить его проводным способом. Для полной же беспроводности был приобретен вот такой мониторчик с автономным питанием и диверсити:

Теперь о том, что это все дает. А дает это свободу 😃 Такую наземку можно разместить там, где удобно с точки зрения радиовидимости, а самому сидеть в холодке/тепле, по желанию 😃 Управление сервой поворотки выведено на крутилку на аппе. Перед полетом наземка ориентируется в направлении предполагаемой трассы полета, в случае уклонения от выбранного маршрута можно подстраивать антенну точнее (диаграмма направленности яги довольно узкая).
Вот так выглядит подшипник поворотки:

А вот так вся наземка выглядит в сборе со штативом, в транспортном положении:
Для большей компактности штатив можно отстыковать 😃
Ну и, чтобы уж совсем комфортно было, РУ 2.4 ггц можно ретранслировать на LRS 433 мгц с помощью вот такого девайса:




Девайс состоит из:
- Черного корпуса из чипидипа 😃
- Передатчика EzUHF 433 мгц
- Приемника Graupner GR-16.
- Кнопки и липо-тестера
- Яги 8 дб
- Штатива манфротто, аналогичного вышеприведенному
Прелесть системы в том, что ретрансляторы можно относить друг от друга как угодно далеко, исключая всякое взаимное влияние. Что касается дальности действия, то с передатчиком 1.2 ггц 400 мВт и диполем, согласно расчетам, она должна быть порядка 45-50 км, что меня полностью устраивает.
Через пару дней приедет монитор и поеду в поле, испытывать 😃
Все хорошее когда-нибудь заканчивается. Моя любовь к “зеленым панасоникам” закончилась в полном соответствии с этим утверждением. И произошло это вот как.
Через несколько дней после эпохального полета моего квадрокоптера на 17 км, я продолжил тестирование сборки из литий-ионных элементов NCR-18650b в реальном полете “на даль”, втайне надеясь достичь заветной отметки в 20 км максимального удаления)) К тому моменту, когда ОСД показал, что израсходована половина емкости батареи, улететь удалось только на 14 км. Ветер был встречный, и можно было спокойно пролететь еще 2-3 км, прежде чем развернуться, но тут и видео стало неожиданно ухудшаться (сейчас-то мне понятно, что произошло это из-за помех в зоне Френеля. От запланированного маршрута я отклонился, а на новом были помехи в виде деревьев в ближней зоне. Недостаточная высота довершила дело). Принял решение возвращаться.
В этот момент прозвенел первый тревожный звоночек. Во время разворота квадрик на мгновение потерял стабильность, “клюнув” на правый бок. Основные приключения начались на удалении 7 км от точки старта. Сам собой квадрокоптер сбросил почти до нуля горизонтальную скорость и начал быстро терять высоту, колбасясь по всем осям 😃 Реакции на стики не было. С 300 метров квадрик снизился до 120 метров, где стабилизировался без моего участия, сам собой. Я облегченно выдохнул, т.к мысленно уже готовился ехать подбирать его останки, тем более, что и видео грозило вот-вот пропасть. Управление вернулось и я продолжил полет в направлении точки старта.
История повторилась на удалении 3 км, когда квадрик был над плотным лесом. Только на этот раз запаса высоты не было. Я боролся за его выживание до последнего, пока не пропало видео.
Трясущимися руками покидал барахло в багажник и набрал номер GPS трекера. Против всяких ожиданий звонок прошел, что уже как бы намекало на то, что квадрик сидит на вершине дерева 😃 (в плотном лесу GSM покрытие у земли, как правило, отсутствует). Поехал к точке падения. Остановился на обочине дороги, сверился с показаниями навигатора. По прямой через лес до места падения было около 500 метров. Прикрутил к рации 8 дб яги, послушал маяк. Слышно. Направление подтвердилось.
В горячке поперся в лес прямо в чем был)) А был я в шортах, шлепанцах и поло по случаю жары в +32, которая стояла в начале июня. Пока дошел, думал сдохну. Тучи комаров, мошки, крапива, ветки хлещут по лицу… в руках айпад, яги и рация, в кармане - фонарик, за плечами - рюкзак с прочими нужными предметами. Горе-турист, в общем 😃
Пришел на точку падения. Квадрика на земле не оказалось. Предварительный вывод: сидит он, родимый, на вершине одной из трех елок, каждая метров по 20-25 высотой. Вернулся домой, так как окончательно стемнело.
На следующее утро я вернулся на место падения, учтя ошибки предыдущего вечера, особенно в плане одежды и обуви)) Вершины елок снизу не просматривались, и в общем, сделать тут можно было только одно: вернуться в город и нанять бригаду таджиков с бензопилами. Елки было жалко безумно, но и выбора не было. Не оставлять же кучу потраченного времени и 100+ тыщ. рублей просто так в лесу?
Приняв такое решение, я шагнул к выходу из леса. И тут произошло ЧУДО: сам собой, без какого-либо участия с моей стороны, квадрик спикировал с вершины одной из елок ПРЯМО К МОИМ НОГАМ. ЦЕЛЫЙ. Одним куском, что называется)) Беглый осмотр показал, что сломан только один проп, который был поврежден несколькими днями ранее.
В общем, счастье и профит))
Теперь о причине краша. А ей стала как раз сборка из панасоников. При длительной разрядке токами, близкими к предельным, есть вероятность, что она перегреется, и перестанет отдавать ток, достаточный для стабильного полета. Я знал опасный предел, и во время полета старался к нему не приближаться. Возможно, жара сделала свое черное дело, но сборка таки перегрелась.
В общем, по итогам этого случая от литий-ионных элементов я решил отказаться. Все хорошее когда-нибудь кончается 😃
Пытался тут полететь серьезно… на этот раз именно с целью установить новый личный рекорд дальности полета на квадрокоптере 😃 Улетел на 17 км, но на обратном пути чуть-чуть не рассчитал поправку на ветер. В итоге плюхнулся на поле с недолетом в 700 метров до точки старта)))
Видео:
Трек полета в Flytrex: flytrex.com/…/quadcopter-black-drone-full-carbon-l…
Там максимальное расстояние Flytrex показывает с учетом недолета. Поэтому по его данным я был только на 16.3 км 😃 Сам полет продолжался 53 минуты 24 секунды, при зарядке в батарею влилось 19800 мАч, что при ее емкости в 20400 мАч - очень хороший показатель. Вес коптера в полном сборе был около 2750 грамм.
Добавлю пару слов по самому полету. На сборке из панасов (писал о ней ранее) очень приятно летать. Солидно, стабильно, как танк 😃 Хотя конечно это батарея для полетов в тихую погоду. Чуть ветерок и квадрику может не хватить тока, который они способны выдать. Смысл в том, чтобы не выходить за комфортный для них уровень нагрузки максимум в 4А на ячейку, иначе они перегреются и тогда полет станет гораздо более захватывающим 😃 Несмотря на то, что я обо всем этом знаю, на последних километрах батарея, похоже, таки перегрелась (еще надо учесть жарищу в +30 без малого), и квадрик порой начинал жить своей жизнью. Например, стремился повернуться по руддеру. Чтобы парировать эти повороты, приходилось довольно активно работать стиком. Ну, а в самом конце, когда до финиша оставался километр, такая вещь, как набор высоты сделалась недостижимой мечтой 😃 Но все равно панасики молодцы - честно отрабатывали до самого конца, плавно, без отсечек разряжаясь “в ноль”. Поэтому и посадка, хоть и была нештатной, оказалось мягкой. Потерь нет, все цело.
В общем, эмоций и адреналина я получил в этот раз достаточно 😃 Дополнительно обострила ситуацию очень некстати разрядившаяся батарея на передатчике. Сигнал о ее разряде раздался, по закону подлости, именно когда я достиг 17 км, и не прекращался весь полет.
Что касается ФПВ оборудования… в этот раз полетел с RMRC 1.3 ггц 400 мВт передатчиком, штатной 3 дб сосиской на нем и 8 дб патчем на приеме. Видео, как можете видеть, было очень хорошим практически в течение всего полета. Помехи появились только на последних километрах.
Собственно, вот:
Трек во flytrex: flytrex.com/…/quadcopter-black-drone-full-carbon-l…
Полет рекордом не считаю, т.к сопровождался он всевозможными препятствиями и косяками. Результат есть, а удовлетворения нет. На видео уже с удаления 1.7 км пошли какие-то помехи в виде полос, потом оно пыталось пропадать уже на удалении в 7 км, чего раньше никогда не было. В этом полете на ЛРС я поставил яги 8 дб, так вот поначалу думал, что помехи из-за мощных наводок от нее. Но разнос и переориентация антенн не помогли, хотя эффект должен был быть. А на следующий день от жары, не иначе, сдох передатчик видео на 2.4 ггц… 😃 Хваленый тюненый лавмейт от ТБС. Видимо, помехи были его предсмертными конвульсиями 😃 Так и придется возвращаться назад на 1.3 😃 А лавмейты, что тюненые, что нет, так или иначе могут сдохнуть, как показывает практика. Попытаюсь поменять его по гарантии 😃
По моим наблюдениям улеты коптеров случаются по трем основным причинам:
- Неадекватное поведение полетного контроллера
- Зависание приемника РУ
- Не настроенный или неправильно настроенный фейлсейф.
Что касается первого пункта, то, как показывает анализ опыта других коптероводов, столкнуться с неадекватным поведением можно практически на любом контроллере из используемых в настоящее время. У одних это происходит чаще, у других реже, но, пожалуй, ни один полетный контроллер не вызывает в подобных случаях столько негатива, сколько вызывает DJI NAZA 😃 В принципе, тут все понятно - низкий порог вхождения. Чтобы настроить какой-нибудь МультиВий, надо убить не один час. С назой многие поступают просто - воткнул, полетел 😃 В этой простоте и кроются всяческие соблазны, которые, в свою очередь, приводят к улету и крэшам коптеров 😃
Соблазн первый: выкинуть прилагаемую палку и прикрутить модуль компаса прямо на раму.
Соблазн второй: не заморачиваться с правильной установкой модуля компаса и грамотной прокладкой его провода относительно силовых проводов и регулей.
Да, я утверждаю, что причины неадеквата Назы и связанных с ним улетов в большинстве случаев кроются в наводках на модуль компаса и на кабель, соединяющий его с назой.
Речь идет о наводках, вызванных постоянным и переменным магнитным полем, создаваемым различными силовыми элементами коптера. Применительно к коптерам, эффективный способ борьбы с подобными наводками есть только один: максимальный разнос со всеми потенциальными их источниками. Есть и другие нюансы. Для себя я выработал ряд рекомендаций, которым следую в общении с Назой, и пока, тьфу-тьфу! - флайэвеи меня обходят стороной 😃 Более того, когда они были, я их вылечил именно таким способом.
Итак, что нужно делать, чтобы Наза не взбесилась?
-
Ни в коем случае не снимать модуль компаса с прилагаемой палки. Никаких вот этих “некрасиво”, “мешает” и т.д.
-
Кабель, соединяющий его с назой располагать как можно дальше от силовых цепей. Не допускать, чтобы этот кабель болтался по всей конструкции. Он должен идти к назе по кратчайшему пути и быть зафиксирован на всем своем протяжении. Расстояние до силовых проводов должно быть не менее 4 см. Пересечения с силовыми проводами даже на этом расстоянии должны происходить по возможности под прямым углом. Если после соблюдения вышеперечисленных условий остался излишек кабеля, то его можно намотать виток к витку на палку, на которой крепится сам модуль компаса, и зафиксировать на ней любым удобным способом, например термоусадкой.
-
Обязательно калибровать компас перед каждым вылетом и после каждой смены батареи. ОБЯЗАТЕЛЬНО!
Что делать, если Назу “понесло”?
Кратковременно переключиться в режим MANUAL, после чего сразу же вернуться в ATTI. Лучше именно в ATTI, т.к велик шанс, что до устранения причины наводок, бешенство Назы продолжится в режиме GPS .
Теперь объясню, почему я так уверен, что именно наводки на компас вызывают потерю контроля над коптером и его потенциальные улеты или крэшы. Уверенность идет из анализа аналогичных случаев, описанных на RCGroups, FPVLab, RCDesign 😃 и прочих подобных ресурсах.
-
Нет данных об неадеквате Назы в режиме MANUAL. Наоборот, в случае неадекватного поведения Назы, только кратковременное переключение в этот режим и способно вернуть управление пилоту и удержать ее от улета на историческую родину 😃
-
Отсутствуют данные о неадекватном поведении Назы с физически отключенным модулем компаса. Т.е, проще говоря, выдернули компас из контроллера, и навсегда забыли о подобных проблемах 😃
-
Если внимательно посмотреть видео с улетами и неадекватом Назы, коих полно на ютюбе и форумах коптерной тематики, можно заметить, что в случае потери контроля, Наза начинает описывать круги с очень большим радиусом, что наводит на мысли о “туалетинге”, и, соответственно, о явных проблемах с компасом. Круги можно наблюдать только на тех видео, где был запас высоты. Если его не было, то, как правило, коптер на полном ходу втыкается в планету, либо его туда втыкает не ожидавший засады пилот 😃
-
Сознательно нарушая вышеприведенные рекомендации, вы имеете все шансы испытать Flyaway на собственной шкуре 😃
Это и произошло сегодня со мной. Я отлетал несколько паков без каких-либо проблем, а потом поставил свою сборку из “зеленых панасоников”. Забывшись, разместил ее на коптере не как обычно, а так, что силовой кабель оказался практически параллелен проводу компаса на участке в 8-10см. Расстояние между ними было около 2 см. Надел шлем, летаю в режиме ЖПС, блинчиком. Через пару минут обратил внимание, что коптер ведет себя так, словно я летаю в ветер. Постоянно приходилось подруливать, парировать спонтанно возникающие возмущения. Понятно, что продолжать подобный полет было бы опасно. Я подвесил коптер в нескольких метрах от себя, и обнаружил, что его неуправляемо носит в горизонтальной плоскости. Это было похоже на ситуацию, когда Наза видит мало спутников, и точность позиционирования становится недостаточной. Однако светодиод при этом мигал двойными зелеными вспышками. Я посадил аппарат, произвел беглый осмотр, и обнаружил именно то, что и ожидал увидеть. Батарею перевернул, заново откалибровал компас, и - о чудо! - идеальный, стабильный полет. В общем, сегодня я был близок к тому, чтобы отписаться в теме “Собираем статистику крэшей и отказов коптеров” 😃
Теперь что касается зависания приемника РУ. Эта ситуация опасна тем, что ее невозможно предсказать, а единственная возможность предупредить - использовать фирменные, проверенные приемники. Я не слышал, чтобы висли Футабы и Граупнеры. А вот разномастные поделки с ХК - да, порой виснут. Это та самая причина, по которой улетают коптеры, оборудованные прочими полетными контроллерами, не Назой 😃 Хотя и Назы это тоже касается. Какое-то время назад Джедаям пришлось отбиваться от необоснованных обвинений в улетах коптеров, вызванных именно зависаниями различных кривых приемников, после чего в ассистанте появился пункт “Advanced failsafe”. Логика его работы такова, что если сигнал на выходе приемника не меняется в течение заданного промежутка времени, Наза считает, что приемник завис, и принудительно переходит в режим failsafe. По этой же причине оптимальное подключение приемника к Назе - PPM или S-BUS, т.е одним единственным проводом. Если отвалится этот провод, переход назы в режим failsafe гарантирован. Произойдет ли это в случае пропадания контакта в одном из десяти проводов, соединяющих приемник и назу по PWM - боольшой вопрос… представьте, вы дали полный газ, а тут отваливается канал газа. Что там будет на входе Назы? Полный газ? Ноль газа? Последнее значение? Я предпочитаю не играть в угадайку.
Выглядит зависание приемника так. В какой-то момент пропадает управление. Коптер отказывается подчиняться командам с пульта. Пилот думает, что пропал сигнал РУ и произошел фейлсейф. На самом деле приемник ЗАВИС. На его выходе остались какие-то последние значения, непосредственно предшествовавшие зависанию. Если это были 40% газа или руддер - вам повезло, коптер сядет или будет крутиться на месте. Но как правило далее пилот мечется по земле и беспомощно наблюдает, как его аппарат улетает по прямой и быстро скрывается в голубой дали. Если на борту были средства поиска, шансы вернуть его еще есть. Если не было - полный привет.
Ну, а третий пункт, который касается не настроенного вовсе или криво настроенного фейлсейфа, тривиален, и его я комментировать не буду 😃
Времени сегодня вечером было в обрез, поэтому на поле выбрался только после заката. В экспресс-программу испытаний вошли два пункта: 1) проверить сборку из элементов Panasonic NCR-18650b в реальном полете “на даль” 2) проверить, как снимает свежеприехавший Мебиус с широкоугольной линзой.
Сразу разрушу возникшую было интригу 😃 Программа испытаний увенчалась полным, нет, даже ПОЛНЕЙШИМ успехом!
Честно говоря, перед полетом у меня были вполне оправданные опасения: а потянут ли мои панасоники весьма нелегкий коптер в реальном полете? Пусть и блинчиком, но с набором нужной, и немалой для полета на даль, высоты. Оказалось, что потянули. Не без оговорок, но лететь можно. Правда, стиль пилотирования дальнелета с питанием от подобной сборки в корне отличается от пилотирования такого же коптера, но с питанием от нормальной липохи. Приходится каждое действие соразмерять с током потребления. Во время набора высоты сбрасывать горизонтальную скорость. Во время горизонтального полета сбавлять газ и идти с небольшим снижением. В итоге все эти ухищрения помогли держать ток потребления в р-не 20А, и это несмотря на +450 грамм веса, по сравнению с предыдущим тестом, в котором я летал на липохах. Причем для упрощения собственной жизни, летал я без крышки коптера, т.е его аэродинамика была примерно как у куска г.на 😃
Теперь про Мебиус. Им я остался очень доволен. Качество картинки, аэродинамика, вес, цена!!! Все настройки я сделал “на глазок”, буквально за 10 минут перед выездом на поле. Саму камеру просто приклеил к днищу коптера на двусторонний (правда, очень и очень качественный) скотч. Немного боялся, что она отвалится в полете и затеряется в навозных полях, но ничего, импровизированное крепление выдержало 😃 Качество картинки в нижеследующем ролике, правда, немного страдает, т.к камера экспонировалась по ярком небу, и землю пришлось вытягивать из глубоких теней на пост-обработке. На будущее поиграю с режимами, с WDR всякими, думаю, поправимо.
Желе, как можно видеть из видео, практически нет. И это при этом, что с пропами и моторами я не делал ровным счетом НИЧЕГО. Никакой балансировки, никаких подвесов. Полет в режиме воткнул-погнал 😃
Теперь о вопросах энергетических. Полет длился 17 минут 24 секунды. Дольше летать я не стал, т.к уже совсем стемнело. От взлета до посадки было пройдено 12.6 км с максимальным удалением в 3.2 км. Скушано было 5717 мАч. В реальности, я думаю, около 5200-5300, т.к сенсор тока чуть-чуть завышает показания.
Итого, что мы имеем. Посчитаем грубо, просто чтобы получить некий ориентир. 5717/12.6 = 454 мАч/км. Исходя из того, что сборка имеет емкость 20400 мАч, а безопасно “высаживать” ее можно до 19000 мАч, то получаем 19000/454 = 41.85 км теорически возможного полета, или 20.92 км максимального удаления. В общем, что и требовалось доказать 😃
Полетал еще сегодня. Пытался решать вопросы с РУ и видео.
С РУ вроде бы решил. Вкрутил на передатчик длинную антенну (даймонд 771), на приемник вернул диполи, которые стояли на дискавери. На видео-передатчике пробовал штатную сосиску на 3дб. Впечатления пока двойственные. То на удалении порядка 2.5 км видео чистое, то на 3.5 км уже в довольно сильных шумах. А то и на 1 км такое наблюдалось. И кстати, самопальный коаксиальный диполь, по ходу дела работает лучше фабричной сосиски. Посмотрите видео, прокомментируйте. Пока списываю на особенности летного поля… в целом после сегодняшнего полета остался с ощущением, что по видео запаса нет Борюсь с искушением вернуть проверенный сетап на 2.4 ггц, по которому запас есть, и очень хороший Но мы пионеры, нам не чтобы сделать дело, а чтобы задолбаться))) Максимальное пройденное расстояние увеличил на 1км, до 19.2 км. Батарейку при этом не насиловал в хлам, но, в общем, уже понятно, что с ней потолок по макс. удалению - 10км. В целом сегодня старался летать так, чтобы максимально экономить энергию. Высоту лишнюю не набирал, летал низенько) следил за потреблением тока, старался его удержать ниже 20А.
Кстати, охрененно удобно оказалось видеть перемещение коптера на карте прямо там, на поле, в реальном времени! Прога называется iTelemetryFPV, есть для андроида и для iOS. У меня сейчас два штатива. На одном трекер с пачтем на поворотке, а на втором - монитор, чуть пониже которого на держателе закреплен айпад Получилась совсем уж базовая станция. Смотришь на экран, рулишь, и сразу же видишь на карте, где именно и куда летишь.
В общем, это уже рутина, в порядке теста слетать километра на три Но был, кстати, один интересный момент. Начиная с 9:48 на удалении 2.5 км начал падать параметр Link Quality (РУ). Он в правом нижнем углу. И одновременно - уровень сигнала РУ. RSSI здесь показывает прямо в дбм, которые легко перевести в микровольты, при желании. И вот как нельзя более наглядно стала видна польза работ по уменьшению бортовых RF шумов. В какой-то момень уровень сигнала РУ упал до -100…-102 дбм. И что бы вы думали? По хрену мороз, никаких фейлсейфов! А теоретический потолок чувствительности приемника EzUHF, между прочим, всего лишь -112 дбм. Бортовые шумы на уровне ниже -100 дбм - это, однако, достижение
Так вот, возвращаясь к теме. Немного погодя начало деградировать видео. Как потом оказалось, между мной и коптером оказался большой холм с дачами На холме - вышка сотовой связи. Да и высота была всего 70 метров. На бреющем шел Я потом треки полета в Google Earth посмотрел, и можно сказать, что в какой-то момент прямая видимость вообще пропала На 2.4 ггц видео отвалилось бы гораздо раньше, я полагаю…
PS: хозяйке на заметку Сегодня столкнулся с ситуацией, когда летишь вроде прямо, ручки на пульте ровно стоят, а коптер идет с легким креном на бок. Оказывается, на высоте был ветер, и это наза подруливала, чтобы держать курс Так что не удивляйтесь в подобной ситуации.
И картинка с треками, для наглядности 😃
Сегодня в Москве выдался денек с относительно приличной температурой воздуха, и я приступил к дальнейшим испытаниям свежепостроенного квадрика-дальнелета 😃 Почему дальнелета - понятно из его предназначения. Аппарат затачивается на покорение максимально возможных расстояний. Разумеется, по FPV. Ну, и с обязательным возвратом на базу, конечно же 😃
Пару дней назад я спаял батарею из так называемых “зеленых панасоников” - элементов питания, широко известных в узких кругах - NCR-18650b. Сборка имеет конфигурацию 4S6P, т.е 14.8 вольт, 20400 мАч, весом 1212 грамм с проводами и импровизированным кожухом. Внутреннее сопротивление получившейся батареи, по данным зарядника Graupner Ultra Duo Plus 60, находится в пределах 38-41 миллиОм. Предварительные поэлементные испытания показали, что предел токоотдачи этих элементов равен 5А, а комфортно они себя чувствуют при токах 3-4А. На предельных нагрузках они довольно сильно разогреваются, градусов до 40-50, по ощущениям.
Перед испытаниями квадрик был перевед в режим полной боевой комплектации, с гоупро 3 блэк в защитном кожухе, привешенной на демпфирующее основание от Зенмуса H3-2D. Вес квадрика составил 1520 грамм, т.е вместе с батареей получилось 2732 грамма.
Ввиду того, что под нагрузкой напряжение на любой сборке из литий-ионов просаживается гораздо сильнее (из-за большего внутреннего сопротивления), чем на нормальной липо, решено было использовать пропы большего размера, чем я бы поставил, если бы полетел на литий-полимерной батарейке. Сегодня планировал поставить свежеприехавшие карбоновые пропы Тарот 16х5 b-shape, но они ВНЕЗАПНО не налезли на ось мотора 😃 Ну, бывает, недоглядел при заказе. Пришлось довольствовать треугольными пропами 15х5 того же производителя.
Когда их ставил, как-то вылетело из головы, что вес квадрика КАК БЫ великоват для моих моторов (MN3110-26 470 kv) и этих пропеллеров, и в результате тест на время висения превратился в изощренное изнасилование “зеленых панасоников” на предельных режимах эксплуатации.
Я понял это, когда поднял квадрик в воздух, и увидел, что ток висения равен 26А, что уже было близко к пределу. По мере разряда батареи ток поднялся до 31А. Висел, немного летал туда-сюда, иногда садился, что проверить, греются ли аккумуляторы. Они грелись, но вменяемо, из-за +9 градусов на улице.
Интересно началось дальше. На 27 минуте полета квадрик потерял стабильность и просел по высоте, едва не коснувшись земли. Вот как это выглядело:
Потом это повторилось еще раз, и еще. Максимально удалось продержать его в воздухе всего лишь 30 минут и 10 секунд. После чего опыт решено было прекратить, ввиду его очевидной опасности для всей конструкции 😃 Минимальное напряжение под нагрузкой было 12.1-12.3 вольта, по данным EzOSD скушано было 14700 мАч, что неплохо сходится с реальностью, т.к при зарядке влилось 13700 мАч.
Выводы из опыта:
- На потерю синхронизации или отсечку регулей симптомы не похожи. Регули у меня TBS Bulletproof 30A, и никаких отсечек там, насколько я знаю, нет.
- Насчет перегрева регулей уверенности нет, но: все-таки они на 30А и с радиаторами. Правда, при отсутствии вентиляции, т.к они были засунуты внутрь лучей.
- Наиболее вероятно, что под предельной нагрузкой батарея просто перестала отдавать необходимый ток, НАЗА пыталась добавить газу на отдельных моторах для стабилизации коптера, в результате падал ток на всех остальных. Итог - потеря высоты.
- При использовании литий-ионов, вроде моих панасоников, ставить пропы на размер-два больше, чем следует из калька и здравого смысла - насущная необходимость. Проверенная теперь и на практике 😃
Дальнелет я ненавязчиво анонсировал еще с осени 😃 В течение осени и зимы постепенно подбирались недостающие комплектующие, потом была довольно быстрая фаза строительства, а теперь идет уже второй день ходовых испытаний. Коротко о конфиге:
- Композитная рама от skydiver’a.
- ВМГ: MN3110-26 470kv и 15x5 T-Motor карбоновые пропы. В качестве источника питания будет опробовано два варианта: два пака в параллель 4S 11A/h Maxamps и сборка 4S6P из зеленых панасов NCR18650b.
Остальные комплектующие более-менее перекочевали со старого доброго Дискавери. В их числе LRS EzUHF, EzOSD, Naza V2, камера TBS69 и т.д. С видео решил поэкспериментировать, для чего приобрел 400 мВт 1.3 ггц передатчик от RMRC и приемник с SAW фильтром от них же.
Вчера состоялся первый полет. На тот момент без ФПВ оборудования. Сажал по пищалке 3.5 вольт на банку, с батареей 8400 мАч отлетал 32 минуты, при этом на зарядке влилось 7100 мАч. Полетный вес был 2200 грамм.
Из замеченных недостатков: сильный “туалетинг” против часовой стрелки, потеря высоты при полете вперед. Второй недостаток проявлялся вообще интересно. Если заставить коптер быстро лететь вперед, то коптер теряет высоту плавно. Если потом резко потащить его стиком в обратном направлении, то он проваливается вниз на пару метров, и только потом наза его как бы подхватывает. Гейны на тот момент были такие: 110/110/130/130 и 130/130.
Сегодня начал плотно играться с гейнами (чему немало способствовал BTU назы, т.к теперь для настройки не нужен комп, достаточно айпада), но в самом начале полетов коптер опять начал туалетить, я немного зарулился и грамотно впилил его в металлический флагшток (летаю на стадионе). Из потерь только два передних пропа, у которых стали “махриться” кончики, примерно по 1 см у каждой лопасти. Думал, все, трындец, но оказалось некритично, и опыты продолжились. Летать в боевом режиме на этих пропах я уже не буду, а для опытов пойдут. Вибраций почти нет, наза с ума не сходит.
Так вот, что касается гейнов. Первая мысль - низковат vertical гейн. В несколько приемов приподнял его аж до 180. Ноль эмоций, ситуация с потерей высоты не изменилась. Поднял АТТИ гейны до 145/145. Ожидаемо повысилась резкость стабилизации, но и только. Дай, думаю, подниму бейсик гейны. Поставил 130/130, эффекта нет. Поднял до 145/145. И вот тут я заметил, что коптер перестал плавно терять высоту в горизонтальном полете и перестал проваливаться при резком реверсе. Поставил 155/155. Получил интересный результат 😃 Теперь при резком реверсе коптер не только не теряет высоту на 1-2 метра, но и ощутимо взмывает верх. Тут уже все стало ясно, я понизил вертикал гейн до 150, и - вуаля! - идеальный горизонтальный полет. Там, кстати, кто-то жаловался в теме про назу, что делать в такой ситуации, когда коптер взмывает вверх при резком реверсе. Решение: понизить бейсик и вертикал гейны. Пропорцию подобрать опытным путем.
Теперь выводы:
- Влияние гейнов на поведение назы далеко не такое очевидное, как в мануале. В частности, тесная связь бейсик и вертикал гейнов для меня стала небольшим открытием.
- Удивительно, но увеличение бейсик и АТТИ гейнов странным образом вылечило и туалетинг. Небольшие остаточные явления были пролечены доворотом модуля ЖПС по часовой стрелке. Так что если кому-то не удается победить это замечательное явление, есть смысл посмотреть в сторону увеличения гейнов.
Ну, а насчет планов, надеюсь, что с максампами смогу летать в р-не 50-60 минут, что должно дать 18-22 километра максимального удаления. С панасами, если хватит токоотдачи, должно быть и того больше. При сравнимой емкости они значительно легче. Два максампа весят 1600 грамм, а сборка панасов примерно 1200 вместе с проводами. Что касается возможностей РУ и ФПВ оборудования, думаю, должно хватить хватить с запасом. Приобрел 433 мгц 8 дб яги радиаловскую (Y5-433), все шумящие компоненты на борту замотал фольгой. Пока не хватает хорошей передающей антенны на 1.3 ггц, оставил штатный “крысиный хвост”.
Народ, требуется помощь зала. Есть 65 см модель старинного парусника Wasa. Достаточно сложная, много деталей и такелажа. При перевозке чуть-чуть надломили переднюю рею, на которой крепятся стаксели. Теперь эту рею требуется заменить. Кто-нибудь знает, где в Москве такое можно проделать? Я просто абсолютно не в курсе вопроса.
Ссылка на пост: История потери и чудесного спасения коптера
Комментарии в видео на английском. Надеюсь, это ни для кого не будет проблемой 😃 В конце ролика есть карта со схемой перемещения коптера.
18 сентября в Московской области выдался единственный за долгое время приличный денек, и я отправился в уже хорошо знакомый Ступинский район на полеты. Была у меня амбициозная цель: улучшить предыдущий личный рекорд дальности - 7 км. В этот раз я хотел улететь на 7.6-8км, чтобы побить лучший результат ФПВЛаба. Как выяснилось, амбиции наказуемы 😃
Поначалу все шло хорошо. Обычная предполетная подготовка, развертывание базовой станции. Кстати сказать, затачивая Дискавери на дальние полеты, я постарался максимально предусмотреть возможность потери коптера. Для этого были приобретены:
-
наземный рекордер видео, чтобы по картинке и данным телеметрии, которые идут в аудио-потоке от EzOSD, восстановить произошедшее. Возникшие неполадки, местонахождение аппарата, высоту, курс, скорость и т.д.
-
EzAntenna Tracker. Такая платка с экранчиком, которая умеет управлять сервами поворотного устройства наземной направленной антенны, и, ко всему прочему, отображает и хранит данные последнего принятого пакета телеметрии, чтобы оперативно получить последние ЖПС координаты, а не выуживать их потом из видео в горячке.
-
Маяк Петра: fmtv.us. Это маячок на 433 мгц, с кучей функций, программируемой частотой, режимом VOX (маяк не передает, когда работают моторы - очень удобно. Упали, заглохли - пошла передача) и отвратительными мануалами и техподдержкой со стороны самого Петра, который просто забивает на это дело и в конце концов перестает отвечать на почту. Описываю все плюс и минусы, т.к хочу быть максимально объективным.
Казалось бы, предусмотрено почти все, вероятность потери коптера сведена к минимуму. Ан нет! И дело было так.
Взлетел, набрал метров 200, взял курс в сторону Московской большой бетонки. Летел по ветру, поэтому скорость была большой, около 95 км/ч. Как потом выяснилось, я думал, что лечу в одном направлении, но на высоте зарулился, и потом выяснилось, что на самом деле я летел тоже в сторону бетонки, но совсем в другое место.
Спокойно достиг удаления 7.6 км, развернулся назад. Скорость сделалась около 60 км/ч, чтобы было логично, т.к теперь я летел против ветра. Тихонечко возвращаюсь, никого не трогаю, как вдруг на удалении 6.3 км пропадает видео! Раздается щелчок релюшки в диверсити приемнике видео от ImmersionRC на 2.4 ггц, и я понимаю, что эта зараза мне с какого-то перепугу подрубила штырь вместо патча, а на штырь 7 db на этом расстоянии приема нет! Вручаю пульт помощнику, начинаю лихорадочно плясать вокруг приемника, отключаю нахрен штырь, надеясь, что приемник сам переключится на патч. Но все тщетно. Картинки как не было, так и нет. Что делать?! Фейлсейф назы с такого расстояния домой аппарат дотащить не успеет, т.к коптер в этом режиме летит очень медленно, и батарей точно не хватит. Делать нечего, врубаю Home Lock и тяну ручку на себя. Газ поддерживаю на уровне примерно 45-50%, чтобы коптер потихоньку снижался.
Несколько напряженных минут вглядываюсь в небо, надеясь услышать жужжание и увидеть подлетающий аппарат. Минут через 8, когда он уже должен быть на базе, понимаю, что коптер потерян и назад не прилетит. На всякий случай врубаю фейл-сейф, хотя понимаю, что это ничего не даст, выключаю аппаратуру и приступаю к плану Б.
И тут выяснилось, что наземный рекордер, зараза, завис на помехах, и запись часть времени просто не шла. Никогда такого с ним не было, тестировал много раз. А тут завис. Вдобавок побился и отказался вопроизводиться файл.
Я бегом к Antenna Tracker, трясущимися руками вбиваю координаты в навигатор, и понимаю, что это координаты точки в 800 метрах от меня. И похоже, что через эту точку я пролетел на пути туда, т.е с тех пор координаты в нем просто не обновлялись.
Остается последняя надежда - маяк! Садимся в машину, едем к предполагаемому месту падения. Как выяснилось потом - едем в совсем другую сторону. Меня смутил похожий лесок, который был в очках перед пропаданием видео. Ну, потом-то выяснилось, что это был другой лесок 😃)
Едем, периодически останавливаясь и прослушивая частоту маяка. Тишина. Ездили до темноты. Теперь уже делать нечего, надо бросать. Еду домой в расстроенных чувствах, пытаясь осознать горечь от возможной (очень, очень возможной!) потери коптера стоимостью примерно 70 тыр, считая третью проху блэк. Сейчас вся надежда на то, что дома удастся восстановить побившееся видео.
Дома вожусь с видео. Уф, восстановилось. Удалось выяснить, что видео пропало не вдруг, а потом коптер еще немного передавал, данные телеметрии еще принимались на протяжении минуты. Изначально я грешил на отказ по питанию, теперь же понял, что проблему надо искать где-то в другом месте. Ну, установил район происшествия, выяснил, что когда уже не было картинки, коптер развернулся под углом 90 градусов к курсу возврата домой и на хорошей скорости и снижаясь под углом градусов 20 полетел на запад.
Дальше по карте рассчитал примерный район падения, координаты записал в навигатор и на следующее утро отправился на поиски, в надежде, что маяк еще работает.
Утро было туманным и дождливым, район предполагаемого падения оказался заросшим мелки, очень плотным березняком, в котором без маяка коптер я бы не нашел никогда. Часа два шлялся туда-сюда и размахивал антенной рации, надеясь поймать сигнал маяка. Тщетно. Уже почти смирился с потерей, но тут осенило. Если коптер снижался, то в конце-концов у него должен был пропасть сигнал РУ, и фейлсейф должен был погнать его в сторону дома, через лес. Решил проверить эту гипотезу и послушать маяк еще и в местах, расположенных между последними известными координатами коптера и домом.
Приехал в деревню Секирино, вышел из машины, включил рацию, и… не поверил ушам и своему счастью, когда услышал четкие сигналы маяка! Все три посылки, которые говорили о том, что коптер находится в радиусе метров 500! Ну, а дальше было дело техники. Довольно быстро я взял пеленг на коптер, покрутился еще в округе с полчасика, т.к показания были противоречивые, потом вкрутил на рацию антенну поменьше, чтобы дополнительно ослабить сигнал, и вышел четко на коптер, который мирно лежал на траве в 1 метре за забором чьей-то дачи!
Повреждений не было никаких. Даже пропы целы! Только полетную камеру немного залепило грязью. Липохи обе вздуты, понятное дело. Счастью не было предела 😃))
Дома я просмотрел видео и восстановил картину событий. Оказалось, что хоум-лок не врубился, и я тупо тянул коптер задним ходом, а поскольку он был в режиме АТТИ, то его носило по ветру хитрыми кругами, пока действительно не сработал фейл-сейф, и на высоте метров 30 не потащил его домой. Так продолжалось до тех пор, пока в батареях не осталось энергии и коптер мягко не сел на травку-муравку! И вот здесь загадка. Почему собственно мягко? У меня регули с прошивкой SimonK, отсечка по напруге там вроде не стоит. В назе контроль питания отключен. А садились мягко. Видимо, так же мягко разряжались батареи 😃 Это единственное объяснение.
Вот такая история! На днях, для полноты картины постараюсь выложить видео беспилотных приключений коптера и схему его передвижений 😃
Пока это новый личный рекорд по дальности FPV полета на квадрике, и, смею надеяться, самый дальний полет на TBS Discovery 😃
Update: обновил ссылку на ролик. Теперь она указывает на полную версию ролика, с нормальным цветокором и без глюков. Предыдущую делал глубоко в ночи, посему вышло кривовато 😃
Решил запостить сюда фото моего текущего рабочего сетапа для полетов на даль.
Встречайте TBS “Air-bomb” Discovery 😁
Конфиг такой:
Рама: оригинальная TBS Discovery с установленным TBS Core
Моторы: 2216 900kv T-motor
Пропы: Graupner 9x5
Акк: Kypom 4500 mah 4S
Моск: NAZA-M + GPS
РУ: Graupner MX-20 + 433 Mhz EzUHF TX + 8ch EzUHF Diversity RX.
FPV: TBS69 Camera (Pixim Seawolf 690 Твл) + Lawmate 2.4 Ghz 800 mWt VTX + Skew planar wheel антенна от Circular Wireless
Lawmate 2.4 ghz VRX + 14 dbi patch (или такой же клевер, что и на передатчике)
OSD: EzOSD (TBS firmware)
Gopro 3 Black Edition