Activity
я тут на днях придумал способ: берем толстую медную проволоку изгибаем по форме микрухи и припаиваем ко всем выводам микрухи, потом просто пытаемся её отпаять и она захапывает с собой микруху
А почему просто не использовать оплетку для выпайки?
пока беглый гуглёж привёл на эту статью.
Спасибо большое!
Судя по тому что там импульсы на следуют попарно со смещением по времени, то заменить энкодер просто кнопками не получится?
Друзья, подскажите кто нибудь модель энкодера-крутилки! Неужели я один с этой проблемой? Хочу об стену уже ее разможжить - пользоваться невозможно
betafpv.com/…/0703-15000kv-brushless-motors
Со скидкой 14 баксов выходят - халява, налетай 😁
0802/22 - лучше уже на 65ю раму. На 75 - скорее 0803 и поменьше кв.
Смотря что нужно и как умеешь - сосед на 0803/25 ккВ/65 рама отжигает в акро, мне 0603/17 или 0802/19 - хватает за глаза
Соответственно батки - у него - 300 гнб с ph2.0, у меня - 300 бетафпв с bt2.0.Если хочется со своим запасом акков остаться - ну 1s 450 mah, на 75ой раме с 0803 16-17 ккв и (скорее всего) трехлопастными пропами должно не сильно разрушить хату и будет не очень уныло(то есть в-принципе снова тот же трешак или мобула 7). На прошлых полетушках в Питере ребята на 75ой раме с достаточно тяжелым HD передатчиком летали по бару и трассе(на 2s), но остальной сетап не упомню
Спасибо! Сейчас пока на бетте скидка 30% хапну чего нибудь путного )
А своё добро оставлю на зубочистку какую нибудь
Из этого имхо 2s зубочистку лучше сделать на 65х пропах… но это не для дома
Это так, но если сменить моторы на beta 0802 22000kv не потянет?
Все же моторы мне надо будет менять. Посоветуйте пойдут ли на раму 75мм моторы 0802 17kv. Общий вес всей комплектухи (кроме ВМГ) - 31г
Может, дело в тренировке?😉
Простите, но это очень уныло - почти блинчиком. Я так и на 5" могу полетать дома.
Хочется вжарить, но так чтобы в случае чего никто не пострадал 😄
Две батарейки может в пару просто ?
На одной полетит, но очень вяло и плохо.
Я летал на этой вмг на 2s, для дома это нереальный перебор
Подскажите как лучше использовать имеющееся добро для сборки комнатного вупа.
Моторы от бетафпв 1102 13500кв
Рама от трашкана
Полётник crazybee f4 тоже от трашкана
Много баток 1s 450мач 13гр
Итого рама+вмг+ПК примерно 29гр
Полетит ли все это на 1s?
Потом проверял дома просто повестив камеру к vtx напрямую.
без всего! Только аккум, камера и vtx
Помогите решить проблему с передатчиком matek. Дикая помеха на любой дистанции и частоте. Приемник Fox-R02
Менял передатчик на другой матек, менял приемник , но тоже на такой же . Потом проверял дома просто повестив камеру к vtx напрямую. Выводил изображение вместо очков на ТВ - результат всегда примерно один. Короче неизменным всегда оставалась связка vtx и приемник fox . У кого нибудь эта пара работает?
без обид я научился настраивать все это дело в воздухе, пока сам не поймешь что к чему толку будет мало!!!
Без обид, но это далеко не всегда возможно так как на дефолтных тупо не летит, уходит в раскачку и падает! Посмотрите мои сообщения выше, если интересно.
Всем кстати спасибо за помощь!
Мой пепелац на 17" пропах летает нормально на таких значениях 80, 20, 90. По D конечно перебор, уберу наверное позже (в полетах видно будет)
Но я бы никогда его не настроил без троса
Всем Привет! Братцы помогите индентифицировать для INAV коэффициенты PID по скриншотам, пока сделал P и D только по pitch и roll. Что - то я сомневаюсь, и вообще бывает так? Скриншоты здесь…
По roll 60 0 75 выглядит уже нормально, а по pitch что то не то. Что за аппарат? Фото есть? iNav 2.5?
есть 2 платы matek 405 str. Одна под свеженьким айнавом 2.5., вторая - под стареньким айнавом 1.9.
Запускаю BLheli Sute для программирования регулей на ноуте через полетный контроллер - подсоединял разные регули и T-motor и RacerStar и нонейм.
В итоге при использовании Полетника под айнавом 2.5 регуль коннектится, но при считывании конфига идет ошибка связи, регуль не определяется, при использовании полетника под айнавом 1.9 - все прекрасно работает как дОлжно.в чем косяк? не должна же прошивка регуля влиять на возможность подключения регуля к компу через BLheliSute?
Если на ПК на котором сейчас 2.5 накатить версию 1.9, то скорее всего все те же ошибки останутся
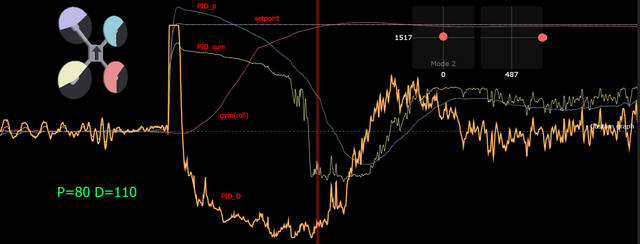
Вертикальный выброс D,
Я писал не про то что меня смущает выброс в начале , а про зашумленный в общем график, что в с свою очередь будет перегревать моторы. На вашем графике параметр D очень “зализано” выглядит. В настройках отображения графиков параметр expo не нулевой видимо?
Мне кажется, D не стоит так поднимать.
Это получилось не визуально, а инструментально. Вполне возможно моторы будут перегреваться, надо пробовать летать.
У меня для 17" получились такие вот оптимальные настройки на тросе (еще не летал) P=80 D=110!!! Ни за что бы не стал поднимать до таких значений если бы навастривал вручную 😃
Правда вот параметр D на графике смущает очень меня. Что скажете это норма?
Далее следует на коптере убрать в минимум рейты по PITCH и YAW, а по ROLL сделать 500* в сек. Выключить AIR и включить ACRO. ПИДы по PITCH и YAW убрать до минимума. По ROLL поставить “D” = 0, “I” = 10.
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум. Иначе время движения стика к своей крайней точке будет вносить погрешность в результаты. У меня это время все время плавало от 50 до 120 мс, хотя я и старался все время это делать с максимальной скоростью 😉
Вот так выглядит лог с ролллом на стике, а на второй картинке на тумблере
Как я понял из постов выше pid-analizer не работает на iNav 2.5 так? Или кому то удалось скормить ей логи?
а вот сделайте OFF
Что то разницы никакой не заметил… А на чем должно отразится?
Парни , подскажите…
Хочу нормально настроить фильтры…коптер 650, пропы 15"
Никак не врублюсь, как через INAV Blacкbox Explorer посмотреть эти паразитные частоты.
Кучу видео пересмотрел…в ступоре.
Ну если вот это смотрели, то думаю более подробно уже не объяснить 😦
low rpm power protect
ON
Про повышение P уже говорили, но у меня похожая по симтопам проблема была на 650 раме и 3506 движках по другой причине. Видео показывает недостаток мощности на выравнивание. Это возможно при низких P, когда квад может, но не хочет дать вовремя мощность на двигатели для уверенной стабилизации. Но бывает и наоборот, когда квад хочет, но не может дать мощь. Например, при низком напряжении севшей батареи, или просадки её из-за высокого внутреннего сопротивления или тонких проводов. В моём случае в ESC была включена опция overcurrent protection, которая и ограничивала мощность, шедшую на моторы и не давала выравниваться нормально. В вашем случае точно ничего такого нет?
Я давно смотрел видео с канала my hobby log про инструментальную настройку пидов и все время на всех квадах мне удавалось не использовать эту методику и настроить все визуально вплоть до 12". Я уже смирился с тем что это придётся сделать, но перед этим решил ещё раз проверить настройки регулья (они на blheli). И обнаружил что скорость изменения оборотов двигателя (не со старта, а уже раскрученного двигателя) зависит от параметра start up power (он у меня стоял на 0.75) при значении 0.5 он вообще набирает примерно 1/3 от номинальных оборотов. Так что при единице моторы стали заметно резвее. (обязательно теперь проверю ещё и overcurrent) Еще не пробовал летать, но чую что на верном пути. Спасибо всем за помощь!
я с рамой 650 нормуль провозился пока не отбалансировал идеально пропы толку не было
да вот, я на то же грешу - пропы уже все покоцаные от падений, да и моторы с биениями
Неоднократно слышал что осцилляции на таких больших пропах не услышать, т.к. ВМГ просто физически не может обработать вследствие инерции
Смелое заявление.
Верно было.
У вас лёгкий коптер, мощные моторы для этого веса и большого диаметра пропы, и на дефолтных пид оно не полетит. Нужно настраивать. Выведите на крутилки и настраивайте. Либо классически.
Моторы не такие уж и мощные раз он висит на 50% газа. На крутилки конечно же все выведено, но это не имеет сейчас никакого смысла т.к. покрутить я их в полете все равно не успею он уже упадёт)
Значит думаете что все же ПИДы, ладно попробую задрать П еще выше (уже пробовал значения от 30 до 70)
Демпфировал полетник на силиконовых трубочках изоляции кабеля. Резал их разно длины, думал что от низкочастоных вибраций спасёт.
Какие сейчас значения PID?
50-15-30
Очень прошу помочь тех кто разбирается в настройке inav
Имеется коптер взлетной массой 1.5кг
5010 360kv 17"
iNav 2.5
Видео полета вот:
И такая лобуда - уходит в раскачку и падает. Ставил полётник на длинные вибростойки, менял полётник, стравил на стандартные резиновые проставки от matek CTR - результат тот же. Это происходит почти при любых значениях ПИД (на которые я сначала грешил), но дело как я сейчас думаю в фильтрации. Лог выложил. Может кто даст дельный совет куда копать?
Всем привет! Кто подскажет модель энкодера в зарядке Q6+ ? Невозможно пользоваться вообще - перескакивает нужный пункт меню
Здравствуйте, уважаемые форумчане. Помогите советом. Квадрокоптер 75 мм, crazybee f4 v2, моторы 0803 16000кв. На двух банках. Прошивка бетафлайт 4.0. При резких полетах с большой скоростью начинает самопроизвольно набирать высоту, не смотря на сброс газа. Аирмода и антигравити никак не влияют на этот процес. Куда копать?
У меня почти тоже, но взмывает ввысь как ракета он сразу после взлёта. Бета 4.1.7 rpm фильтрация + maverick 96kHz 4/4kHz dshot 300. Говорят может такое быть из за того что проц не тянет, но прямо сейчас у меня нет возможности это проверить
Или эти пересадить на другой пк?
Если запитать камеру и передаван от лабораторника то они работают (не помню сколько потребляют точно , но что то очень не много)
ОСД может помочь перезаливка шрифтов
И перезаливал, и даже ПК шил с эму на бету
Вот как вариант думаю поставить внешнюю FrskyOSD всего 1.5г если брать версию на 5В. Но там какие то заморочки с ее активацией. Кто то ее уже пробовал?
Кто нибудь может подсказать, что за мосфеты стоят в полетнике Crazybee f4 PRO V2?
Вот они. Брал уже дважды. Дважды они по маркировке чуть отличались. Сегодня поменял уже второй раз (еще не пробовал)
Может стабилизатор 5в кончился, и не тянет нагрузку ? От него по идее и osd должно питаться. Перепаять стаб, или выпаять микросхему dc-dc преобразователя 5В и подключить внешний источник питания на 5 вольт, хотя бы на пробу.
ЕСли откинуть все от ПК то напруга возвращается к 4.9В но osd так и не работает
Не везет мне что то с ПК от beta
Неисправными валяются 2 полетника F4 2-4S AIO Brushless Flight Controller 12A . У первого при взлете и ударе о потолок канопа прогнулась и ударила по гироскопу. В результате BF пишет arming flag: NO_GYRO, но что самое интересное не работают моторы . Блхели их видит но не крутит.
Есть ли смысл перепаивать гироскоп?
У второго, по неизвестной причине, на выходе 5В где должны питаться камера и vtx всего 2.3В если нагрузку откинуть то 4.9В. И второе: не работает OSD - изображение с камеры просто транслируется на vtx.
Если с 5В питанием я вопрос могу решить установкой внешнего микробэка то что делать с osd ума не приложу, разве что поставить камеру с osd чтобы хотябы напряжение знать. Есть ли камеры микро размера с вольтажом на osd ?
Буду благодарен за подсказки для устранения этих поломок
Вес 92гм и 350мах батка как-то не сочетается.
4S однозначно много, надо 3S на 450-550мах.
Опечатался, конечно 3S !
А почему такой тяжелый получился? На такой же раме и таких же моторах 42гр дрон в стоке от betafpv.
Надо имхо облегчать, а не менять батарею.
Отличия самые основные: моторы мои на 4,8г тяжелее + у меня крестовина карбоновая +2,9г, другой ПК +0.9г + внешний приемник +1,5г. Где остальные 4г я не знаю ))
Есть ли смысл например попробовать 2s, но пропы взять 65мм. Пробовал на данном сетапе летать на 450mah 2S - вяло летит
Привет! Собрал тут вот мелкаш на раме от beta85. Взлетный вес 92г. (без аккума 56г)
пропы циклон 2035 4х лопастые
моторы мамба 1103 8500кв
Но беда в том что на аккуме 350 4s летает чуть менее 3х минут. Это если не наваливать.
Есть мысли как можно увеличить полетное время? Может раму от зубочистки взять и поставить 65мм пропы? Кто что думает?
Перепрошить на F-Port, взять неинвертированный сигнал и подкинуть на T2.
У меня приемник XM на нем нет F-port. А если взять не инвертированный sbus с ножки транзистора на приемнике и кинуть его после оторванного транзистора на ПК? Как думаете прокатит?
Купил Radiolink pixhawk для большого коптера который сейчас под iNav. Посоветуйте пожалуйста обучающий ресурс с которого начать вникать в arducopter.
Привет всем! На плате Beta AIO 12A срезало транзистор (обведен на фото) поэтому не работает приемник frsky. Я так понимаю это инвертирующий сигнал транзистор, так?
Кто знает его маркировку или чем его заменить?
Можно ли приемник подкинуть куда то на другой вход?
От внешнего Бека это не мой вариант, наверное. Вуп 65мм. Каждый грамм на счету.
У меня на crazybee F4 v2 была такая же проблема. Поставил внешний микро бэк (по моему весом меньше грамма) и всех делов !
Может Motor-Stop включен?
Airmode включён. Motor stop выкл.
чтобы его можно было включить, регули должны быть либо BlHeli_32 либо прошитые BlHeli_S JESC с телеметрией RPM
Естественно, если этого не сделать он и не взлетит