Activity
Я не имею ввиду та что RHE
2 - Просто интересно - почему для коррекции выбрали именно 4.2.24 - а не 4.2.19.или 4.2.28
- они вроде помощнее будут , да и на то время они уже были
Просто интересно !
Потому что, на тот момент эта прошивка была наиболее тщательно изучена. Прошивки выходили часто, а время на изучение было ограничено.
Мощность прошивки зависит от того, какой байт прошивка послала передатчику. Поменяешь байтик, поменяется и мощность. В любой версии одинаково. В первых прошивках мощность была постоянной, потом её сделали динамической увеличивающейся с ростом расстояния. регулируется как мощность передатчика телеметрии в дроне, так и мощность видеопередатчика. Ну и мощность передатчика пульта тоже.
Антенна у меня переставлена ( на дроне) - вопрос именно по прошивке !
Есть 4/2/24 - но RHE - после прочтения тестов по нагреву ЧИП передатчика - как то не очень есть желание сжечь выходной каскад ( лишних тугриков нет )Вот если бы были прошивки с – 10mw-25- mw и до max power - 58 mw — но градациями !!!
Но как - то с этим тут не заморачиваются 😦
Не, ну заморочиться то можно, а смысл ?
У меня на два км и так летает. Ничего вроде за несколько лет не сгорело.
А что за тесты по нагреву чипа передатчика ? Можно ссылочку ?
Иногда от помех помогает изменение частоты видео в меню пульта. Или забиндить еще раз.
От помех помогает замена пиг-тейлов антенн в аппаратуре. Там штатно какие-то фиговые пигтейлы были, по-крайней мере раньше. После того ка заменил на нормальные полосы прошли.
Нормальный коврик в 3 раза больше и во столько же дороже
Вопрос только в том - нафига H501S коврик ?
Его конструкция тем и замечательна, что оттуда не торчит ни гимблов, ни тонких ножек, ни других предметов.
Сажать можно хоть в траву, хоть на грунт, хоть в снег и ничего ему не будет.
Так зачем гемор с ковриком то ? Взлететь чтобы трава не мешела ? Так это можно прям с чемодана в котором транспортировали.
Хабсанчик тем и хорош, что кроме самого квадрика и пульта ничего не нужно и ничего не торчит наружу.
Два корпуса всего - один в руках, другой летает.
К чему такой садизм ? Эта замазка делается как пластилин, если её немного нагреть обычным феном.
После того, как камера будет отделена от Дрона, замазка смывается обычным ацетоном или другим похожим растворителем.
А вы её пробовали греть феном ?
А вы пробовали на корпус ацетон наносить ?
У меня ее паяльник не брал. Видно разные есть “замазки”. Коптер выпуска начала 17-го года.
Вот у меня тоже. Грел я её феном от паяльной станции на температуре 250 градусов. Корпус размягчается, замазка - нет.
Подозреваю, что программа коптера не может прочитать показания компаса, и соответственно направление носа квадра рассчитывается только по гироскопу. А гироскопу как раз и свойственно уплывание показаний направления со временем. Ведь компас необходим для коррекции гироскопа, а этого-то и не происходит.
Совершенно верно. Показания H вычисляются по гироскопу и потом постепенно (в течении секунд) корректируются по магнетометру. Т.о. если было показание 0 и вы развернули квадирк очень быстро на 180 градусов, то показание должно быстро измениться на значение близкое к 180 и потом, за 3-5 секунд скорректироваться до точного значения по компасу.
Если неправильно корректирует, нужно перекалибровывать компас. Если неправильно показывает сразу, то перекалибровывать нужно акселерометр (“на бумажках”, вращение вокруг оси Z).
товарищи!
я так понял 501м - использует другой компас, те не как в остальных в линейке. так я гуглил и не нашел его в продаже вообще - ктонить такое встречал?
Прошивка H501S поддерживает три вида компаса. Один старый H501S, второй новый H501S и H501SS, а третий это, видимо компас H501M. Возможно и на другие модели потом его будут ставить.
А нету макрофотки микросхемы компаса ?
ты мой спаситель <3
хз как я это не увидел в поиске. заказал, надеюсь с ним заработает.
Если сможете, сфоткайте крупно, пожалуйста.
Дожали парня ))))))))))))))
Теперь можно рассказать, что экранчик у него маленький, что с пигтейлом проблемы бывают и дальность не очень, прошивки редко обновляются,
что батареек в него надо много и т.д. 😁
Меня интересует такой вот вопрос, как модель трекера RF V-16 прикреплённая на пузо квадрокоптера Хабсан Н 501SS влияет на калибровку компаса и полёты в режиме GPS MOD ?
Прошу ответить, кто знает или кто летает с данным теркером на пузе Хабсана Н 501S ?
Вроде ни как не влияет. Калибрую квадрик с установленным (на носу) V16.
Внутри V16 есть сильный магнит его динамика, но праильно откалибровать вроде не мешает. Снять V16 после калибровки и не перекалибровывать не пробовал, всегда летаю с ним.
Интересует полёт в ветер с включенным GPS,а не в ручном режиме. Интересно как в ветер в режиме GPS будет происходить возврат домой и вообще полёты?
Однажды я быстро улетел на 2 км 200 м, а потом не мог вернуться, пока не догадался высоту сменить. На земле особого ветра небыло, он был наверху.
Полезная информация!
Если я Вас правильно понял,то после второй калибровки компаса подождать пока показания перестанут прыгать и повернуть квадрокоптер мордой по четырём сторонам направления, так? Что за расчётная бумажка ? Дрон поворачивать по четырём сторонам на земле или в руках его держать нужно?
Поставить на землю, носом на север, так чтобы H было равно нулю. Потом переставлять “след в след” ножками в те же точки поворачивая по часовой стрелке на 90 градусов и проверяя, что цифра так же увеличивается на 90 градусов. Самое важное это показание 270 градусов, т.к. с ростом угла ошибка нарастает. И ещё для правильного показания H очень важна калибровка гироскопа “на бумажках”.
На сколько мне известно в электротранспорте вроде используются литий-ионники, а не полимеры?
Часто да, но в моём LiPo были штатные, LiPo остались и сейчас. Штатные были 8.2Ач x 7S, теперь 12Ач x 8S. Вспух предыдущий комплект Zippy 8Ач x 8S. В ЭТ обычно пухнет плюсовая банка. У меня так и случилось.
Если есть лишние денги или хотите новые батареи, то тыкайте иголкой…
А я вот давеча проткнул иголкой банку аккумулятора 12Ач от самоката. Выпустил газ, заклеил. Побочных эффектов в виде дыма и выкидывания в помойку не заметил…
Я протыкал маленькие от регистратора, блютуз передатчика. Работали вполсилы, пока шли новые. Была попытка перед помойкой проткнуть и наш вздутый. Игла раскалилась, обжёгся, пошел газ. Выбросил, не испытывая.) Так что не советую, все равно ёмкость упала, а с ней и коптер упадет).
Дык не надо в электроды банки иглой тыкать. Нужно только плёнку аккуратно проколоть и недопускать попадения воздуха вовнутрь сразу выжимая накопившийся газ.
Но, рекомендовать такие эксперименты, конечно, тоже не буду.
Отключена калибровка при подключении батареи, а также занижены требования к точности показаний. Где-то в середине этого форума было описание этих прошивок. 😁
Не занижены, а завышены.
Про экранчик:
У меня и в таком порядке теперь крутить приходится раз по 10
Провод полётного контроллера свободен, не замят ?
Подушка под полётным контроллером впорядке ?
При вращении во время калибровки H отображается верно ?
Что на H901A-TX-V4.2.28, что на H901A-TX-V4.2.33 диапазон 5,8 частот : 5735-5845 МГц.
Видимо, они ещё где-то подправили и я не заметил.
В 4.2.28 было:
LDR R0, =5735
ADDS R0, #105
CMP R1, R0
BLS loc_3668
В 4.2.33 стало:
LDR R1, =5735
ADDS R1, #110
CMP R0, R1
BLS locret_37FA
Видимо, они вывернули по-другому алгоритм, а суть осталась та же.
На Pro пульте 5730+115=5845 всегда было.
Возможно расширили диапазон частот в стандартном пульте на ещё один канал. Это если там действительно было от 5735 до 5840
Да.
Теперь вот думаю отклонение от курса это косяк мотора или нет.
А как мотор может влиять на курс ?
Там PID-регулятор по yaw. Может yaw по-лучше откалибровать.
Сегодня летал после двух крашей в сугроб при температуре -12 градусов. Компас крутил по 8 - 9 оборотов, вместо 2х -3х при температуре -2 градуса. Могу предположить это из за температуры.
Не, я при минус 10… минус 15 летал - ни каких проблем с компасом.
Если калибровка 8-9 оборотов, то нормально не откалибруется. Нужно в таких случаях перекалибровывать.
Кто-нибудь уже поставил эту прошивку? Спутников прибавилось?
А с чего бы им прибавиться ?
Режим работы тот же, ничего не изменилось.
В этой прошивки из значительных изменений только дополнительный видеоканал, да мощность при бинде.
В новой прошивке пульта (.33) появилась ещё одна NMEA команда модулю GPS.
Теперь ему ещё отправляется “CCSIR,6,0*4”. Она включает режим GPS+GLONASS.
До этого использовался тот режим, на использование которого был запрограммирован модуль, например через u-center.
Ещё, по-видимому, новую прошивку собрали другим компилятором. Несколько поменялась библиотека математических функций.
Кое-чего добавилось, но оно не используется. Кое-чего слегка модифицировано.
Один проводок ,который могли кинуть при производстве если вдуматься сколько печальных расставаний не случилось бы…но неееет
Там в прошивке специальная проверка. Режим RTH включается если только включены одновременно оба переключателя. Хотели бы другого, убрали бы проверку на GPS-переключатель.
Эти антенны абсолютно идентичны… Разница только в точке подводки кабеля.
А подводка кабеля может очень сильно менять характеристику антенны. Не зря кабель согласуют с антенной, не зря стаканы делают от затекания токов и т.п.
Как по качеству он правда не знаю.
Хорошее качество. Лёгкий, удобный, квадрик фиксируется, есть отсеки для мелочей.
В прошивке пульта .33 ещё изменили алгоритм поиска лучшей частоты для видео.
Подробно пока не разбирался, но он стал сложнее, чем просто перебор частот.
приятно читать грамотного человека 😃 мой друг UART там тоже есть посмотрите статью и схему нарисованную карандашом вот этим коллегой из за рубежа panteltje.com/panteltje/quadcopter/hud.html там и точки подключения указаны и это именно UART правда проект для пик и создатель использует старый процессор для вывода телетекста но как по мне так все это пустики парень просто слепил из того что было
Да я давно видел эту схему. Но, что значит AFC_RX на ней непонятно. Куда она подключена то ?
Весь дрон работает на SPI и только модуль GPS подключен через USART.
Кстати, во всех предыдущих прошивках пульта при включении пульт выдавал в USART к которому подключается GPS строку с идентификатором прошивки.
В прошивке .33 это тоже выпилили. Видимо, какая-то старая фича, потому как и совместимость с древними командами тоже отпилили.
Чистят её по-тихоньку. Молодцы.
Вывести на выход(гнездо) с пульта, чтобы подключив дополнительный монитор, можно было созерцать телеметрию на нем, а не бегать глазками то в монитор, то в пульт.
Да не, это понятно. Я имел в виду телеметрию в цифровом виде.
А для OSD на видео, я думаю нужно плясать от того, что скейлер предназначен для вывода не только на LCD-панель, но и на CRT. Для этого у него там специальные выходы есть.
Кстати, ещё похоже, что добавили дополнительный канал (самый высокочастотный) видео.
Теперь, похоже максимальная частота 5735+110=5845, а была 5735+105=5840. Это так ?
Никто не прошивал V4.2.33 ?
Т.е. биндиться должен уже на б о льшем расстоянии (и, соответственно, не факт, что на наилучшем канале)?
В чём смысл такого “усовершенствования”? Непонятно…
Я вот тоже не понял. Наверное часто жалуются, что не биндится, т.к. прикладывать не умеют. А кто-нибудь заливал ? Правда расстояние увеличилось ?
Т.е. биндиться должен уже на б о льшем расстоянии (и, соответственно, не факт, что на наилучшем канале)?
В чём смысл такого “усовершенствования”? Непонятно…
Я вот тоже не понял. Наверное часто жалуются, что не биндится, т.к. прикладывать не умеют. А кто-нибудь заливал ? Правда расстояние увеличилось ?
есть фотография плат пульта с двух сторон? если OSD не подмешиваеться на уровне процессора скаллера (квадратная микросхема управления матрицей) то просто надо найти точку подключения, если подмешиваеться на уровне процессора то придеться врезаться в разрыв порта UART и ставить мини осд и уже замешаный сигнал писать в двр, их сейчас на китайском спермарките много разных и на любой вкус
Там Terrawins стоит. Это скейлер-улучшайзер со встроенным OSD. У него компонентный выход RGB и синхронизация.
ля тех ктохочет покапать свой пульт на предмет добычи телеметрии копайте в сторону модуля передатчика, по своей сути это модем на 2.4 гигогерца это первая точка где стоит искать телеметрию вторая точка это сам процессор скалера
Телеметрия вся идёт с приёмника 2.4 по SPI в основной контроллер. От туда она выводится уже при помощи команд скейлера. Время будет, хочу попробовать сделать отдельное устройство на микроконтроллере, которое будет записывать телеметрию с эфира.
Впринципе, что в дроне, что в пульте телеметрию выколупать не так сложно, другой вопрос, а что с ней потом делать. Разве что блекбокс сделать с записью во времени.
для того что бы получить данные с пульта (промежуточные) достаточно USB UART TTL переходника
Недостаточно. Там не USART, там SPI. И свой протокол работы с модемом.
Информация передаётся 15 байтными пакетами.
Command 0xE7 - telemetry
Params:
01 - heading*10 high byte (0x0B10 = 2832 / 10 = 283.2)
02 - heading*10 low byte
03 - roll*10 hight byte (0xFBE2 = FFFF - FBE2 = 4D1 -> 1053 / 10 -> - 105.3)
04 - roll*10 low byte
05 - pitch*10 high byte
06 - pitch*10 low byte
07 -
08 - speed
09 -
0a -
0b - altitude*10 low byte (0x000C = 12 = 1.2m)
0c - altitude*10 high byte
0d - voltage*10
0e - satelites count
В 15-ом байте находится контрольная сумма пакета.
А что там с мощностью на H901A-TX-V4.2.33 ?
Зачем-то выпилили установку мощности -3.4 dBm (PAC=1, TBG=6) при бинде.
Пакет прошивок H501A Firmware Update 01-2018.zip.
FC V1.1.41
RX (A/SS) V1.1.43
TX FPV1 V1.1.16
TX FPV2 V4.2.33
_H901A-TX-V4.2.33 Standard
- Added the function/ability to work with the new feature giving you the ability to adjust/change your orbit point.
- Improved the distance value display issues.
_
“Самый главный недостаток - Трекер засыпает и теряет спутники. При входящей СМС пытается найти, но не всегда получается.
В режиме gon# настроил отправку данных на сервер каждую минуту, при этом интернет на симке выключил. Теперь трекер не теряет связь со спутниками, оперативно присылает координаты.”
Это не недостаток, это преимущество. В таком режиме он может работать несколько недель. При постоянно включённом GPS несколько часов.
Я на своем(LK106) выработал такой алгоритм: С начала посылаю на трэкер настроенный на спящий режим СМС с запросом чтобы координаты выдавал только по GPS
С RF-V16 и того проще. Запросил координаты, пошёл по ним. GPS проснулся. По дороге запросил ещё раз уточнённые уже на “тёплом” GPS и всё. Всего пара SMS.
Этот я видел. А чем он лучше ?
А если еще убрать тяжелую батарейку ( она с избытком, на неделю хватает) и заменить вибро на яркий светодиод( можно и пищалку туда еще добавить паралельно)
Батарейку ни в коем случае убирать не надо. У меня коптер на дерево сел, так родная батарея села тем же вечером, т.к. дистанционно коптер выключить нельзя, а в прошивках раньше и видеопередатчик не выключался. А вот батарея трекера работала ещё больше недели и по уровню сигнала GSM я из дома смотрел созрел уже дрон и лежит в сугробе или висит ещё на дереве 😆
Яркий светодиод да - я приделал, полезно, а пищалка вроде особо не нужна, он и так весьма громко играет при звонке на него.
У меня такой www.ebay.com/itm/Mini-size-G...-/272956931125
Что скажите, стоит такой брать? Хочу на квадрокоптер Habsan H501S поставить снизу прикрепить, поместится?
Да, хороший трекер. У меня на носу на 3M-липучке с защёлками ставится.
Почему нет, поместится конечно , главное, чтобы помех остальным антеннам , сенсорам не создавал.В теме вроде было по установке, поищите. Этот трекер конечно не самый лучший по точности , GPS антенка мелкая . Идеально перед использованием проверить, как он будет работать в вашей местности.Симку надо брать с самым хорошим покрытием оператора.
У меня точность до нескольких метров давал. Более, чем достаточно, учитывая его возможность звенеть.
А если еще убрать тяжелую батарейку ( она с избытком, на неделю хватает) и заменить вибро на яркий светодиод( можно и пищалку туда еще добавить паралельно)
Батарейку ни в коем случае убирать не надо. У меня коптер на дерево сел, так родная батарея села тем же вечером, т.к. дистанционно коптер выключить нельзя, а в прошивках раньше и видеопередатчик не выключался. А вот батарея трекера работала ещё больше недели и по уровню сигнала GSM я из дома смотрел созрел уже дрон и лежит в сугробе или висит ещё на дереве 😆
Яркий светодиод да - я приделал, полезно, а пищалка вроде особо не нужна, он и так весьма громко играет при звонке на него.
У меня такой www.ebay.com/itm/Mini-size-G...-/272956931125
Что скажите, стоит такой брать? Хочу на квадрокоптер Habsan H501S поставить снизу прикрепить, поместится?
Да, хороший трекер. У меня на носу на 3M-липучке с защёлками ставится.
Почему нет, поместится конечно , главное, чтобы помех остальным антеннам , сенсорам не создавал.В теме вроде было по установке, поищите. Этот трекер конечно не самый лучший по точности , GPS антенка мелкая . Идеально перед использованием проверить, как он будет работать в вашей местности.Симку надо брать с самым хорошим покрытием оператора.
У меня точность до нескольких метров давал. Более, чем достаточно, учитывая его возможность звенеть.
А по толщине, снизу если его поставить данный трекер, он не будет пузом по асфальту шаркать при посадке или при взлёте. Расстояния хватит,чтобы туда установить данный трекер?
Будет шаркать.
По-этому у меня установлен на носу. Там они и датчикам не мешает и пузо свободно. На пузе ещё греется видеомодуль, там вообще лучше ничего не приклеивать.
Креплю на липучке, к дверце аккумуляторного отсека, очень удобно. Под брюхом трекер теряет спутники… При падении вероятность, что теркер будет перевернут и прикрыт тушкои коптера минимальна.
На такой липучке, боюсь при падении трекер сорвёт.
только липучкой крепите и все? Потерять в полете сам трекер не боитесь?
В полёте томожет и провисит, там ускорений больших нет, а вот от удара при падении боюсь оторвать его может. У меня липучка такая, что рукой выщелкнуть непросто и то я страховочный тросик сделал на случай срыва.
Под пузом шаркать не будет, если асфальт ровный. Если с бугорками, то может цеплять Точность норм, но он может достаточно долго искать спутники. Я переключил трекер в режим постоянной работы, так ему не нужно время для поиска спутников в случае чего. Перед полётом включил, после полётов выключил. Во время полёта он ещё и трек на сайт загружает.
В таком режиме он всего несколько часов проработать может. В режиме ответа по запросу у меня зимой на дереве работал две недели (примерно в это же время года).
Какой всё таки лучше взять GPS трекер из этих двух?
GPS трекер RF-V16
GPS трекер tl-007
RF-V16 однозначно. Вообще, я пытался найти ему альтернативу по массе, весу, габариту, качеству определения и удобству использования и пока не нашёл. Только если плату отдельно и встраивать внутрь корпуса, что тоже непросто (мало места свободного внутри).
Стержень от термопистолета и дешевле и легче, к тому же вечером красиво смотрится, ножки светятся(если стержни прозрачные) и можно сделать любую удобную длину.
Да-да. Я так пробовал - хорошо получается. Конец стержня разогревается горячи воздухом и стержень вставляется в отверстие для резиновой затычки в ножке и там сам фиксируется. С другой стороны на концы стержней я приклеил резиновые ножки от какой-то электроники (уже не помню, но подошли точно).
Хочу сделать прорези в крышке аккумуляторного отсека для вывода проводов наружу. Подскажи как снимается крышка?
Одна петля специально с прорезью. Просто с усилием выщёлкивается та сторона с которой прорезь.
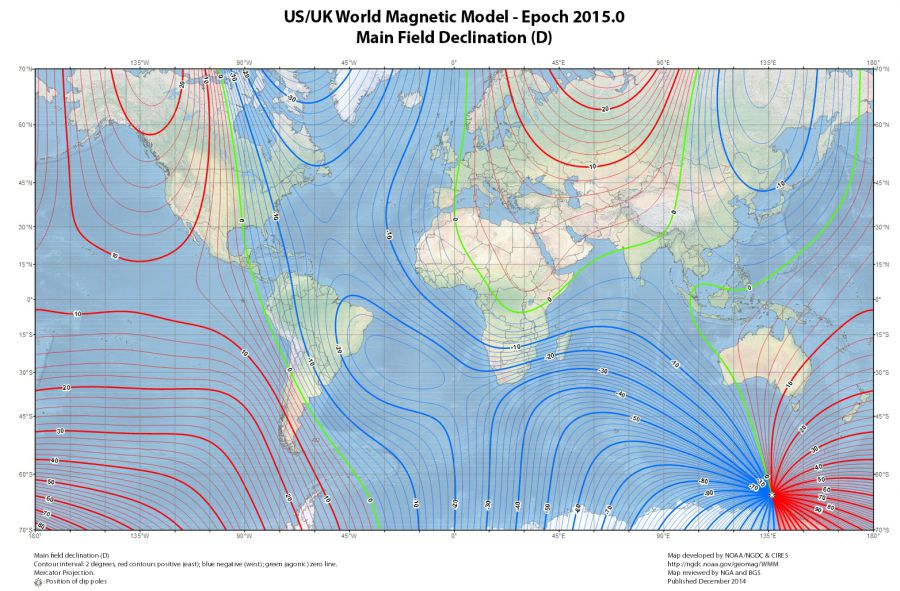
Олег, я правильно понимаю, что в момент активации RTH при подлёте к пульту (к примеру)так как фиксируется именно GPS, не трогая стик рудера при возврате (типо корректируя морду дрона ) при подлёте к конечной посадочной точке, мы замечаем как раз разницу магнитного склонения, как бы полёт по прямой, но каким то из лучей в качестве прямой (в зависимости от места нахождения, у гого то больше а у гого то меньше), так как географический и магнитный отличается, ну и если в прошивке полётника подкорректировать эти значения (склонения от местности), то можно избавиться от сего недуга.
Или я чего-то не понял 😃
Ну да. Если не совсем правильно калиброван компас или акселерометр, то дрон летит лучом вперёд, т.к. ориентируется он по направлению магнитному, а корректирует координаты по показаниям GPS.
Вообще, GPS и сам может выдавать показание H, но только во время движения. Я бы, на месте разработчиков, этим воспользовался и корректировал бы калибровку компаса в полёте. Правда, от кривой калибровки акселерометра это не спасёт.
Получается, что если дрон смотрит точно камерой на объект, то или это ошибка калибровки компаса в десяток градусов, или в прошивке есть таблица магнитных склонений. Но пока я её там не нашёл. Есть какая-то табличка пока непонятная мне, но она слишком маленькая для таблицы склонений, а все остальные данные уже понятно для чего используются.
А вообще это я в сё к тому, как делать калибровку компаса. Добиваться нужно показаний на магнитный север или на географический ?
P.S. получается показатель “Н” именно магнитный
Похоже что да, но летит он по координатам GPS, а там север географический.
После калибровки компаса север показывает на магнитный полюс.
После взлёта и непродолжительного движения, коптер рассчитывает магнитное склонение (зная угол смещения по координатам GPS и показания компаса, это сделать не сложно) и вполне вероятно что может выставлять угол на истинный (географический) север. Но скорее всего он этого не делает и оставляет магнитный полюс в показаниях, но при этом где-то хранит данные о рассчитанном магнитном склонении (без него невозможен RTH).
Всё верно, кроме невозможности RTH. Он может начать движение в неправильном направлении (с ошибкой на 10 градусов) и если бы он и продолжал такое движение, то RTH был бы невозможен, но дрон постоянно с заданной периодичностью корректирует направление полёта (у нашего еть ПИД по GPS) и т.о. в любом случае летит куда надо, хоть и пытается носом повернуться не туда. Вот если бы он использовал склонение и акселерометр по yaw и компас были идеально откалиброваны, то он летел бы всегда чётко носом на цель. Но на расстоянии до несколько км 10 градусов при используемом алгоритме ошибка некритичная. Вот я и думаю, не забили ли они на склонение вообще.
На сей день вам бы пришлось перепрошивать новую таблицу каждые 2 месяца, ну или хотя бы каждые полгода.
Не всё так плохо. Магнитное поле земли меняется медленно и перепрошивать пришлось бы раз в 100-200 лет 😁
Олег… Колись…так какой тайный смысл этого вопроса!? 😉
Тайный смысл - понять как правильно калибровать компас: на магнитный север или на географический опираясь. Понять это можно или полно детально разобравшись в алгоритме прошивки или по косвенным признакам поведения дрона. Вот я пытаюсь пойти сперва вторым путём 😉
Я тоже за магнитный 😃
В таком случае получается, что GPS использует географический север, а дрон для поворота головы - магнитный.
Т.е. если указать координаты северного полюса, то дрон полетит на этот полюс головой повернувшись градусов на 10 в сторону от цели (для нашей местности).
Координаты точек на карте, координаты GPS - все они используют географический северный полюс. А вот датчик компаса - магнитный.
В целях приведения к единому знаменателю в прошивках PX4 (Пиксхавк), ардукоптер и т.п. используют меомагнитную модель земли - некоторую табличку магнитных склонений и наклонений,
интерполируя значения которой находят значения для точки по GPS.
www.garmin.ru/about/posts/22524/
Цитата из статьи: “Для того чтобы встроенный магнитный компас мог отделить полезный сигнал (магнитное поле земли) от различных помех, у него есть функция калибровки.”
Только я не про калибровку, с ней всё ясно. Я про то, что магнитный север от географического отличается на магнитное склонение для конкретной местности.
Хочу задать каверзный вопрос.
Как вы считаете, показания H (Heading, Азимут) телеметрии показывают угол относительно географического севера (как на картах или GPS) или относительно магнитного севера земли (как компас) ?
Самому конечно сделать можно если подобрать микросхмеу, которую не сложно припаять к самодельной плате.
Припаять то DFN-8 размером 2x2 мм не сложно. Сложно сделать плату под него 😃
Это наверное перебор. Жрать будет много (весь пар в гудок уйдет).
У него мощность выходная настраивается.
Да и по сравнению с потреблением моторов это мелочи.
А что за усилитель, покажите где брали если не секрет?
Усилитель вот этот вот.
Ну это же платная услуга. Чем просто так отстёгивать оператору лучше последние координаты записать и ввести в телефон или в GPS девайс, который куплен на сэкономленные деньги.
Последние координаты, как правило, в 200 - 300 метров от точки где лежит дрон. Особенно, если дело происходит над лесом. Уж лучше я сразу к дрону пойду, да и стоимость услуги копеечная - около 20 р за день полётов получается.
???😉 Это как?
Ну, у этого усилителя есть возможность отключения - можно подать на вывод лог 0 или 1 и, в зависимости от этого, он или включен или нет. Это работает. Только в выключенном состоянии он работает, по всей видимости, как аттенюатор и дальность управления падает относительно штатной.
Мощность штатного передатчика 5.8 по datasheet составляет 13 dBm или 20 mW. Процессор стокового передатчика RTC6705. Мощность меняется автоматически в зависимости от расстояния с 2 dBm до 13 dBm. Вполне возможно что следом за процессором установлен усилитель - 670E, не нашел информации про него.
Не то что бы вполне возможно, а там действительно стоит этот усилитель. Если полистать ветку, то мы его даже идентифицировали и определили его характеристики, которые совпали с экспериментальными измерениями (мощности на выходе видеопередатчика).
Вот ещё сообщение из этой же ветки. Только ветку никто не читает, все пишут, читать некогда 😃
Разве что для прошивки LCD 😃
Там, в коде этой прошивки LCD, даже видеоплеер есть, который может видео играть с SD-карточки, а также есть возможно кодировать видео. Вопрос только, зачем они эту функциональность деактивировали в пультах для H501S.
How to use your Hubsan H107D transmitter as an DVR ground station for FPV.
Я вот думаю, может попробовать пульт прошивкой от 107D зашить ? Наверняка там железо одинаковое. Появится возможность DVR 😁
В конце февраля привезут сей девайс, тогда можно будет более объективно судить сколько и чего добавить.
Из недорогих полу-самопальных этот неплохой. К нему только ещё аттенюаторы нужно.
Здравствуйте,
Кто-то ставил на управление и телеметрию пару таких девайсов ?
Ставил на управление. Дальность видео упала.
При отключенном усилителе дальность управления упала, а при включенном - дальность видео. В любом случае дальнобойное управление без видео как-то не очень 😉
Первое что пропадает на таких расстояниях - это видеосигнал - для чего я и ставил DYS MI200MW.
Я нашёл усилитель на 5.8, который с небольшим DIY ставится внутрь корпуса.
У него регулируется усиление и, наверное, можно найти компромисс по мощности чтобы и видео было и управление не давило. Весит несколько грамм (плата тонкая). Радиатором ему будет служить экран БП дрона. Только протестировать его бы сперва, а у меня источника 5.8 ГГц нету на чём проверить. Да и мощность на выходе нечем померить, если только по RSSI.
Показатель да отличный, но не стоит забывать что это при чистом эфире (вне города), вряд-ли показания были такие же в городе на таком же удалении (скорей всего файлсев).
Сей девайс заслуживает внимания при его компактности и простоте установки, но цена 😃
У меня на 2200 метров в городе, в парке было отличное управление и почти чистое видео. Дальше я просто побоялся что не смогу вернуться (как потом оказалось весьма обоснованно), т.к. летел против ветра.
Вот, если подлетать близко к БС сотовой связи, вот там да, RSSI скачет и у видеоканала и у телеметрии.
А девайс этот вроде как умеет электронно выключаться, только толку от этого мало. Через него всё равно мощность плохо проходит в пассивном состоянии.
Евгений, мне больше импонирует ваша идея оснастить дрон системой оперативного поиска в виде дистанционно включаемых пищалок. Это и дешевле и гораздо актуальней для многих начинающих пилотов. И именно возможность дистанционного включения, в тот момент времени, который нам необходим по прибытию в район предполагаемого поиска, а не произвольное включение в момент падения напряжения, остановки двигателей и т.д., Т.е, дистанционка позволит экономить питание и исключит привлечение интереса к упавшему дрону сторонних лиц.
Лучшая дистанционная пищалка это GPS-трекер. Да, громкий звук при поиске очень полезен, но ночной файэвей показал, что и сетовая индикация тоже нужна. Поставил туда вместо виброзвонка мощный XML-U2 светодиод. Теперь не только громко звенит музычкой, ещё и вспыхивает по требованию.
Но, опять же, чтобы всем этим воспользоваться сперва приходится пройти более километра и тут без координат по GPS будет грустно.
Информация для тех, кто ещё не купил трекер для дрона: “По данным Верховного суда России, в первом полугодии 2017 г. в стране было заведено 117 уголовных дел по факту приобретения «шпионских» устройств. В течение 2016 г. 228 таких дел было рассмотрено в судах, причем лишь в одном случае «злоумышленник» был оправдан”
После случая с привлечением хозяина коровы Владимир Владимирович дал получение разобраться с этим вопросом.
Там же написано “в передатчике”, т.е. в пульте. В пульте есть слот для SD-карты. Только они пошутили, в нашей модели он не задействован программно.
Я так понимаю, что все довольны… но никто этой “полезной” функцией не пользуется? 😉
Мне вот этой фичи очень нехватало когда квадрик на дереве висел.
Огни то я с пульта выключил, а вот видео выключить не мог, а оно жрало батарейку.
Добрый день! С Новым годом!!!
Украли и продали мой 501s причём был укомплектован четырьмя аккумами, кейсом, лопастями, всякой дополнительной мелочью, с стандартным пультом.
А как можно украсть и продать коптер вместе с аппаратурой и мелочёвкой ? Чемодан что ли стащили целиком из машины ?
Здравствуйте, помогите, пожалуйста! Мне нужно знать подробное поведение оригинального квадрокоптера hubsan h501ss. Расскажите, пожалуйста:
- Просит ли ваш квадрокоптер проводить калибровку компаса при каждом включении?
Оригинальный всегда просит.
- Включает ли он белые светодиоды или они больше похожи на сиреневые?
Белый свет больше похож на сиреневый.
- Выключает ли он двигатели, если вы держите только левый (правый не трогаете) стик примерно 2 секунды в нижнем положении? (Я знаю, что не должно быть так, но может кто сталкивался с такой проблемой)
Новые прошивки выключают, более старые - нет.
- Сколько обычно спутников gps ловит он и пульт в квартире/доме и на улице? Если в квартире пульт ловит 3, а коптер ни одного, это нормально?
В квартире не смысла проверять.
На открытом месте квадрик должен ловить 9 - 12 спутников, пульт может несколько меньше 6 - 11.
- Глючит ли у вас индикатор заряда батареи коптера на пульте? То есть, например, у меня он изначально может показывать полный заряд, но в полете может через короткое время опустить до нуля, при этом после посадки и выключения двигателей, заряд снова начинает подниматься.
Это может просаживаться напряжение на аккумуляторе, например в холодную погоду или сам аккумулятор старый, долго лежал.
- На сколько хватает аккумулятора lipo на 1400mah в стандартном пульте?
Это не знаю, у меня от квадрика 2700 мАч стоит.
Вообще наличие аккумулятора 1400 мАч указывает на то, что квадрик достаточно свежий.
- Какая погрешность в измерении высоты без gps? (~2м на самой высоте 2м–это нормально?
В принципе, нормально. Он высоту по давлению определяет. При арме моторов считает, что это ноль высоты. Высота может прыгать от порывов ветра, медленно накапливать ошибку за полёт. Ещё точность измерения высоты зависит от температуры. Там в расчётах участвует термодатчик. В самых старых прошивках температура не учитывалась и высоту завирало очень сильно. По даташиту точно 20 см, но реально - несколько метров.
- Сильно ли он греется? Если он греется с выключенными двигателями–это нормально?
Больше всего греется видеоплата под брюхом коптера. Это нормально.
- Есть какой то механизм в слоте карты памяти, чтобы ее можно было легко достать или она просто вставляется так, что ее потом не вытащишь?
Там push-pell механизм. Карта вытаскивается за выступ. Вроде ничего сложного, если карту случайно вверх ногами не засунуть.
- Какие имена видеозаписям он дает?
S-ка называет видео HBS00000.MOV, HBS00001.MOV, HBS00002.MOV и т.д.
У SS-ки названия типа hubsan_record_197011_8146.mp4
Просто, недавно купил этот коптер, есть подозрение на подделку или брак.
Буду очень благодарен за ответы!
Вряд ли его кто-то подделывает.
Возможно у вас не SS-версия, а S-версия, но не более того.
Подделать сложно, особенно пульт.
Покажите экран пульта с версиями прошивок и всё станет понятно.
Ещё в дроне антенны поставить как положено.
В дроне особо не разбежишься - места внутри мало. Штатное расположение антенны управления там неудачное. Но наружу городить лишние части тоже не хочется.
Не поделитесь ссылочкой, какие они. Мавиком не интересовался, а вот антенки интересуют.
В H501S антенны с линейной поляризацией, а не с круговой.
Если ставить спиральные, то в тушке тоже придётся менять, иначе смысла нет.
Разобрал пульт, обнаружил отсутствие батарейки,по типу как на материнкикомпа. Вопрос у всех так? Может нужно впаять крепление и поставить батарейку?
У меня на H501S ещё 2015 года выпуска этой батарейки уже небыло (в пульте). Батарейка эта, похоже, питает часы скейлера при отключенном источнике питания. Но, т.к. эти часы в прошивке пульта для H501S/SS не используются, то и батарейку они, видимо, решили не впаивать.
Там в скейлере из неиспользуемого есть ещё видеоплеер, который с SD-карты умеет видео проигрывать, а также скейлер умеет кодировать видео и записывать на SD. Его прошивка больше и сложнее, чем прошивки TX, RD и FC вместе взятые.
Так что, кроме батарейки там ещё слот под SD неиспользуемый, аудио разъём 3.5 мм и ещё всякое.
А зачем? У Вас же всё нормально.
Ну 2,2 км нормально, но хочется и больше пока батареи хватает.
Ещё хочется чтобы в городе видео дальше работало в условиях помех.
А у вас дальность ограничивается управлением ? Срабатывает RTH ?
Вы наверное знаете в 501-м какая мощность передатчика на 5.8 ггц ?
В этой ветке не так давно публиковали. Точно не помню, вроде было около 200 мВт - максимальная. Мощность видеопередатчика регулируется в зависимости от удалённости коптера от пульта.
Вот если после антенны поставить усилитель мощности и коммутатор приём-передача.
А смысл от всей этой деятельности ?
Ставил я усилитель мощности с коммутатором на аппаратуру.
В итоге, при включении мощи достаточно сильно падала дальность видео. А при отключенной моще несильно, но падала дальность управления.
Да и вообще, у меня, например нет проблемы с телеметрией или управлением. Дальность ограничивается видеосигналом.
Какой смысл летать только по телеметрии ? В городе, в парке летал на 2200 и всё было нормально, но дальше уже с видео как повезёт.
С управлением проблем нет, хотя у меня есть в запасе более узконаправленные антенны, но повторюсь - смысла увеличивать мощу управления не вижу.
Вот, сделал компактный и лёгкий усилитель видео 5.8 ГГц. Будет время, поэкспериментирую. Фишка в том, что усилитель с регулируемой мощностью
и можно будет подобрать оптимальную мощность, чтобы не сильно грелся, не давил управление и телеметрию. Это ещё может, наверное, что-то дать.
Глюков и потерь управления меньше. “против лома нет приёма”.
Только вот, бывалые говорят, что лучший усилитель это антенна 😁
Расшифруйте пожалуйста.
Если Вы о взаимных помехах на видео, то ФНЧ на выходах передатчиков никто кроме китайцев не отменял.
Больше шансов вернуть дрон, если что.
Да чего его возвращать, без видео он далеко не улетит 😉
Там тогда не ФНЧ ставить надо, а перекрёстные режект-фильтры, наверное.
Не забывайте что перегруженный (разогнанный) выходной каскад любого передатчика начинает ср…ть гармониками гораздо выше второй.
Чем бороться с последствиями лучше их не допускать.
А он особо то не разогранный. Там всё в пределах даташита. Там мощность снижена, чтобы сертификацию FCC пройти.
Не то ксв лучше ,не то горячий конец дальше стал от антенны видео.
Вот что антенны нужно максимально физически разности в пространстве это я заметил сразу. Думаю, что с повышением мощности этот эффект будет ещё более заметен.
Т.е., с бумажек надо было начать калибровку чтобы он дальше завёлся?
Т.е. своё положение по yaw квадрик определяет при помощи акселерометра. А при помощи компаса только исправляет накапливающуюся ошибку.