Activity
Поздравляю, отличный выбор!!!
Если такое насилие осуществлять плавно и не за кончики лопастей, то все нормально будет.
Тапок, которым фиксировал лопасти с флайбаром - не подходит, поскольку без флайбара лопасти не наклоняются при складывании и стоят высоко над балкой.
Как говорил Оби-ван-Кэнуби: “Используй силу”. Если преодолеть сопротивление серв, то все там наклоняется как надо.
Кстати, а в источнике питания (раз плата падала), нет надрыва проводов, паек?
Источник питания внешний, он не падал. 😃
Мне на фото, не понравился вид пайки конденсатора 4700 Мкф - не прогрето.
Это я выпаивал конденсатор, чтобы проверить его. Он в порядке. Я после впайки все проверил, контакты в порядке. А на что этот конденсатор влияет?
Докладываю. Разобрал переменный резистор, почистил там все спиртом и ластиком. Собрал, больше хрипов нет. На место OPA2604 вставил LM4562. Все встало на свои места, играет на все деньги. Нижний ОУ ставить не стал, так как появляется хрип. Без нижнего ОУ не работает линейный выход, он мне и не нужен. А вот OPA2604 или сломался при падении, или уже был полумертвый, так как разница по сравнению с LM4562 колоссальная.
На сим считаю ремонт успешно завершенным, всем большое спасибо за участие и советы!!!
По качеству изображения 800-я и 900-я серии идентичны. Я не стал переплачивать за внешний микрофон и дополнительную встроенную память. Но если брать по максимуму, то 900-я серия предпочтительнее. Посчитайте стоимость 800-й + хорошей флешки на 32 гига и сравните с ценой 900-й серии. И принимайте решение 😃
А что это?
Это разъем для крепления внешней вспышки, лампы освещения, внешнего микрофона.
Рассматриваю ещё такой вариант www.electrogor.ru/other/foto/...d/9426/tab/beh (не реклама, а просто описание) , но одна матрица… правда не шарю что это дает?
Тут оптика темнее + один сенсор. Будет больше артефактов на изображении при съемке в сумерках.
А у неё подсветка(фонарик) есть? и пульт д\у?
Пульт есть, подсветки нет (или я не понял, как включать), но есть вспышка для режима фотографирования. Так же на ней нет “горячего башмака” и входа для внешнего микрофона. Все это + встроенная память на 32 гига есть в версии HDC-SD900, но там цена уже существенно выше.
Вроде не тот вес, что бы плату ломать. разъемы, переменник, панельки микросхем
имхо
Согласен, похоже с платой все в порядке, я тщательно осмотрел ее. Проблема в регуляторе громкости (на который пришелся удар при падении) и в обвязке нижнего операционного усилителя (что там сломалось, я не знаю).
Я месяц назад взял Panasonic HDC-SD800. Брал по совету матерого видеооператора. Считаю, что для домашнего использования это лучшая камера по соотношению цена-качество. Снимать надо только в режиме 1080p, тогда картинка будет очень хорошей. Оптика хорошая, светлая. Три матрицы, поэтому в сумерках снимает очень хорошо. Хороший оптический стабилизатор.
Если не сложно 😃
Я тут посмотрел повнимательнее на девайс. У него вроде как есть выход кроме как на наушники. Что на этом выходе если подключиться?
Это линейный выход. Я пока не пробовал подключаться к нему. Вечером попробую (я сейчас на работе)
Нет, я про звук который хрипит. С двумя ОУ. Он одинаково слышен в обоих динамиках? Похож ли этот хрип на эфект гитарный дисторшн?
Да, звук в обоих динамиках. Похож на перегрузку, с щелчками и пропаданием сигнала. Могу записать и выложить тут 😃
эм чото не разглядел на фото
А звук не похож на дисторшн гитарный эфект?😃 В одбоих ухах звук?
С одним операционником при определенных положениях регулятора громкости звук хороший, никаких отклонений я не слышу. Играет существенно лучше Creative Audigy 2 и лучше ресивера Harman Kardon AVR260. Больше мне сравнивать не с чем.
Да любой подойдет на 50К
Хм интересно 😃 подпись на плате про него. X2 это чтоле он планировался туда стерео шестиногий т.е.
Ну он и есть шестиногий, тот, что сейчас на плате.
На плате переменный резистор называется ALPS 16/27 50K X2, но я такой найти не могу. Может подскажете, какие бывают аналоги?
Ну, первое что на ум приходит: заменить этот операционник и подергать “оранжевые штуковины” на предмет отрыва ног -это конденсаторы керамические).
Кстати, сначала попробуйте просто старый на место вставить и тот, который рядом с регулятором громкости пошевелить- они при ударе из панельки могут выскакивать.
Я менял ОУ местами, доставал по очереди, менял на LM4562. Перепробовал все варианты. Играет только когда нижнего ОУ нет в гнезде, иначе с любыми операционниками на выходе жуткий хрип. С LM4562 громкость сигнала значительно выше, почему так, я не знаю.
Но очевидно, что неисправна обвязка нижнего ОУ и регулятор громкости. Так же я не уверен насчет правильной работы шины питания. Регулятор громкости я заменю, а вот все остальное надо чинить, давайте дальше двигаться… 😃 Что мне мерять и где?
Сейчас в гости заходил Андрей Prikupets, мы с ним пытались методом научного тыка разобраться в проблеме.
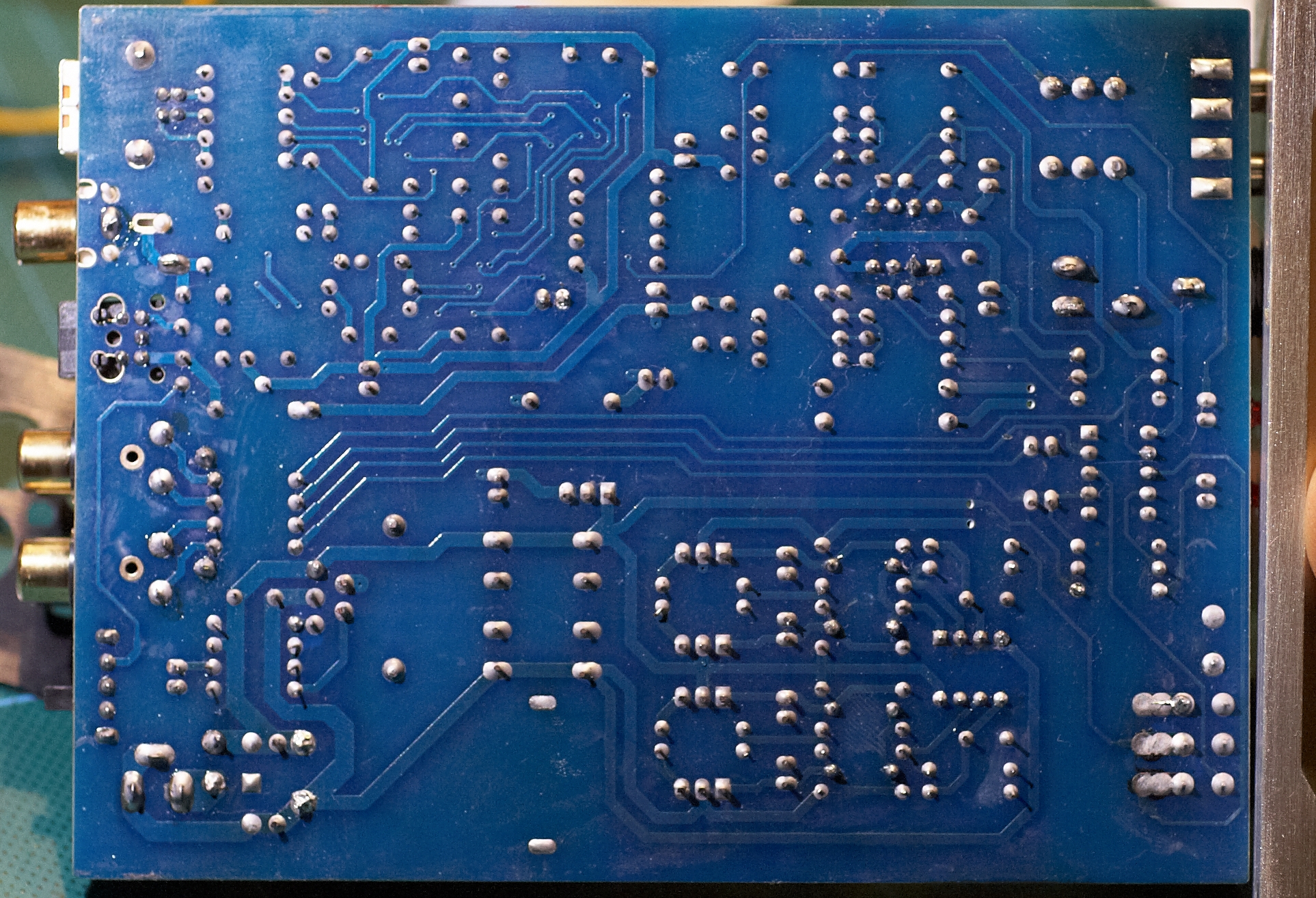
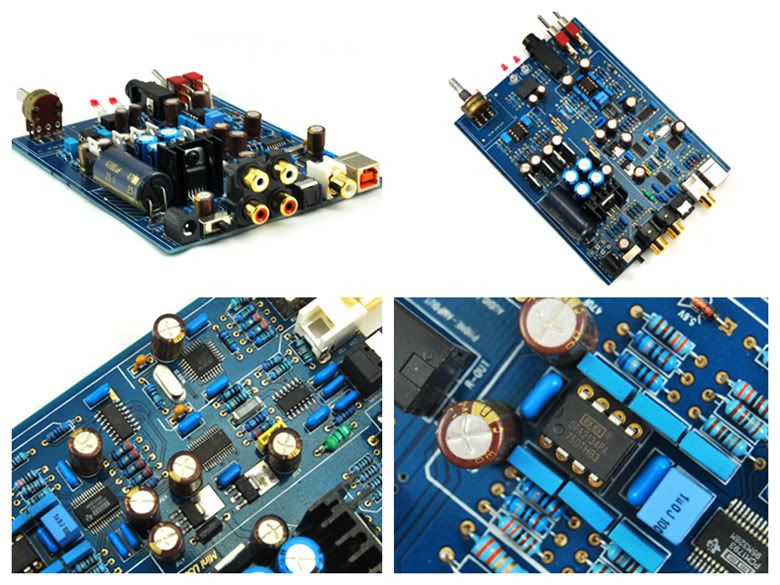
Вот фотографии устройства (увеличение по клику):
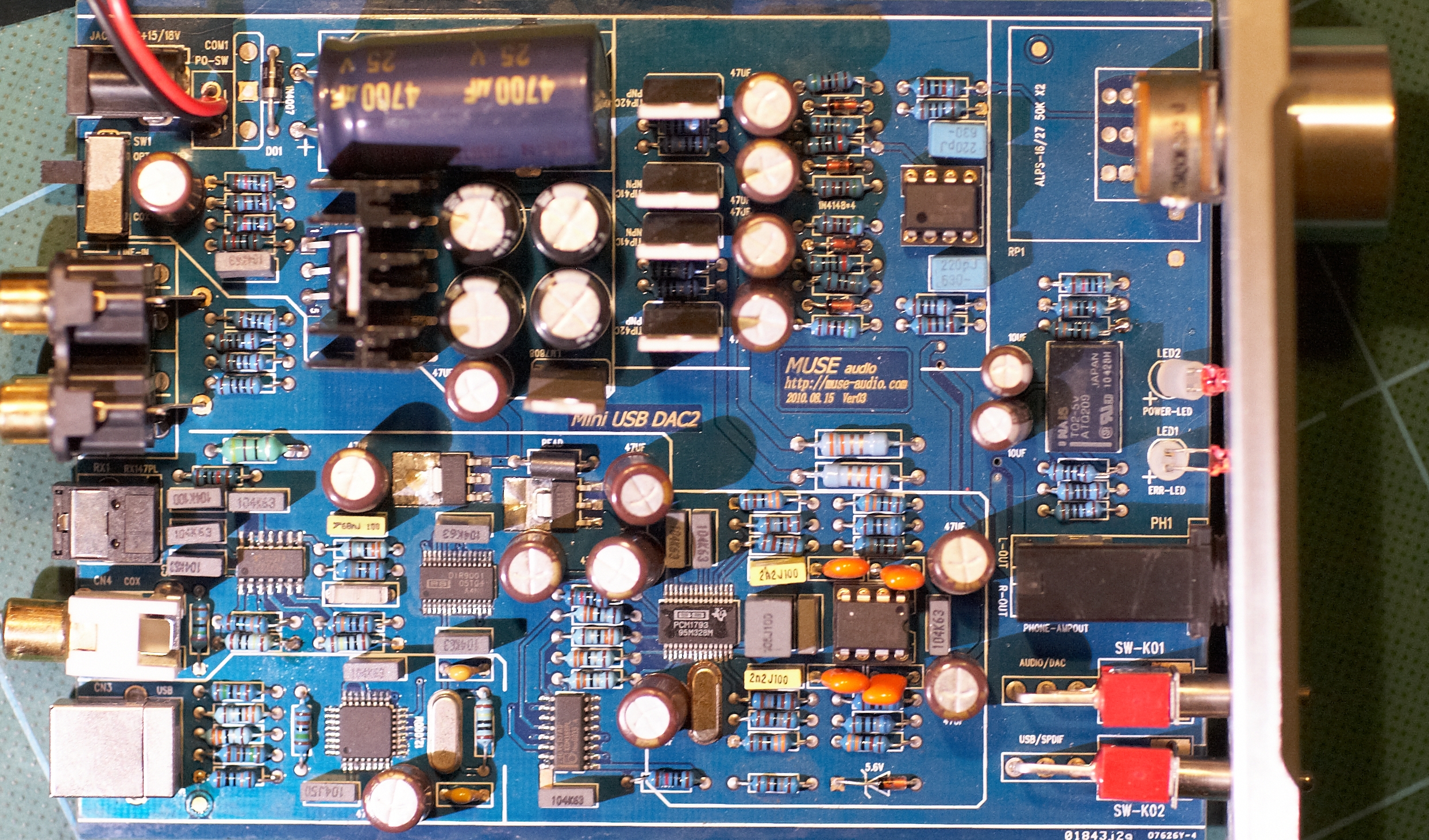
Когда я удалил ОУ OP275 (его маркировку не видно на фото, но он внизу в окружении оранжевых фиговин), то звук стал нормальным. Но не всегда, а лишь при определенных положениях регулятора громкости. Если представить его как циферблат часов, с началом на 7 часов и конце на 5 часов, то хрипит примерно с 10 до 12:30, потом до 3 часов играет нормально, после трех звук пропадает, как-будто от перегрузки. Ну или регулятор там тоже сломан.
Мерили напряжение при нагрузке, ничего не проседает.
Так же померяли напряжение питания на втором ОУ OPA2604 (он вверху справа, около него два голубых керамических конденсатора). Там ровно столько, сколько и на входе с блока питания, 14,8 вольт. Такое ощущение, что плюс подан на ОУ напрямую, без каких либо развязок.
Что же умерло около удаленного ОУ?
О каком приличном устройстве может идти речь, это аудиофильские загоны. Этот девайс на опусиле за 250 руб. в чипдипе. Его цена 1-2$.
Ну здесь корпус дороже 2 баксов стоит. 😃
Я специально искал самый дешевый ЦАП с усилителем для наушников и поддержкой USB. Дешевле не нашел. Так что я не похож на “православного” аудиофила, я прагматик. Но эта штука звучит намного лучше крутых Аудиджи за 200 баксов и легко прокачивает низкоомные наушники, в отличие от навороченных звуковых карт.
В качестве бреда: а наушники менять пробовали? 😃
Да, я проверял наушники на другом источнике, с ними все в порядке.
ЗЫ: Чего ж он денег то стоит столько, как пол Боинга?
Это самое дешевое устройство на приличных компонентах. 😦 Аналоги стоят в разы дороже.
Наиболее вероятно что при падении девайс приземлился на ручку регулировки громкости. Или выключатели. Или при падении сильно дернул разъем из себя. Проверьте не отпаялись ли пины разъемов и т.д.
Да, похоже удар пришелся на ручку громкости, при обзоре проволчка, шедшая на корпус регулятора громкости отвалилась, но я её первым делом пропаял, результата не было. Сейчас буду фотки платы делать.
У меня проблема с усилителем для наушников, а в радиоэлектронике не разбираюсь, хотя паяльник и тестер использовать могу.
Купил вот такой усилитель для наушников, вчера забрал с почты.

Пришел домой, все распаковал, подключил к компьютеру и стал тестировать. Все сразу заработало без проблем. Жена позвала ужинать, усилитель остался включенным. Пока я был на кухне, мой любопытный пятилетний сын случайно уронил усилитель со стола. Говорит, что случайно потянул за провод от наушников. Я пришел на грохот, проверил - звука нет.
Отключил все, подключил заново. Звук появился, но значительно тише и хрипит на любой громкости. Побывал подключать по USB и по SPDIF, разницы нет. Значит проблема где-то на выходе, или в цепи питания.
Вроде должна быть несложная проблема. Прошу вашей помощи!
Я посмотрел плату, пропаял все сопли, ничего не изменилось.
Готов выложить детальные фотографии платы и следовать вашим указаниям. Будет такой ремонт он-лайн. 😃
Заранее спасибо!
Я не говорю ерунду, я делюсь опытом.
А опыт полетов таков: для вертолетов оптимальным значением fail-safe является сохранение последнего значения канала газа. Однако, если приемник такой функции не поддерживает, а поддерживает только предварительно заданное значение, то это значение надо выставлять так, чтобы мотор не работал. Это аксиома, подтвержденная крашами и даже кровью неопытных моделистов.
Не должен двигатель при fail-safe набирать обороты. Никогда.
Скукум для фейл-сейфа запоминает лишь указанное положение ручки газа/шага. Поэтому с легкими аккумами был набор высоты.
При чем тут набор высоты? Если сукум понимает только одно положение газа при пропадании сигнала, то это положение должно быть равно нулевому уровню газа, иного не дано! Если же fail-safe был запрограммирован на что-то другое, то это и есть грубейшая ошибка, на которой должны учиться новички.
Совершенно очевидно, что все печальные осложнения у автора возникли из-за неправильной настройки fail-safe.
Ну оно и было настроено на удержание, но в связи с тем что при настройке на вертолете стояли акки 6000мах, а при случившейся ситуации 5000мах., из-за чего соотвественно и происходил набор высоты.
Настраивать надо на удержание текущего значения управляющего сигнала, а не на удержание высоты.
Если сигнал пропадает, то приемник должен просто выдавать на регулятор последнее значение до пропадания сигнала. Тогда есть шанс поймать вертолет при появлении сигнала.
Думаю мой опыт кому нибудь поможет.
Из всего написанного новички должны уяснить только одно: НИКОГДА fail-safe не должен быть настроен на увеличение газа. Никогда!
Только на удержание текущего значения или выключение совсем. Это аксиома, подтверждаемая вашим рассказом, в том числе.
А что, такой есть? Киньте ссылочку пож.
Нормально работающих я не встречал. Так что и ссылочки нет, увы. Я возлагаю большие надежды на проект OpenPilot, там возможно прикрутят и телеметрию, и все нужные датчики. А пока вариантов нет.
Реально надуманные какие-то у вас проблемы. Как можно зажарить элементы силовухи, если они изначально рассчитаны на полеты при постоянном 100% газе? И неужели при FPV полетах пилот прикидывает дальность полета, глядя на разницу между воздушной и GPS скоростью? Если уж есть телеметрия, но она дистанцию эту явно показывает… Единственное для чего возд. скорость используют - чтобы самолет по ветру при планировании не сваливался (и то сомнительная польза если честно), а для вертолета баловство все это, чисто по приколу.
При полете далеко надо прежде всего смотреть на потребление тока и на остаток заряда. Бародатчик врет метра на три стабильно из-за повышенного давления от лопастей. Воздушная скорость тоже не актуальна на вертолете, GPS скорости хватает для оценки полета. Есть смысл ставить ультразвуковой датчик высоты для комфортной посадки.
астегматизм был? у тебя наблюдался до операции эффект ореола от света ночью?
Нет, ничего подобного не было. У меня были совсем небольшие отклонения, -1 и -1,65. Решился на операцию когда стало некомфортно водить машину. Очки или линзы ни разу не использовал.
Аккумуляторы не обязательно в раму засовывать, я размещаю под рамой, между шасси. А 450-ка с лопастями 350 мм и удлиненным хвостом легко летит быстрее ста км в час, этого, я полагаю, достаточно для активных полетов. 😃
Зато если что пойдет не так, то вероятность катастрофических последствий ниже (типа в машину попал, или, не дай бог, в человека).
Мне делали операцию по технологии cTEN в августе прошлого года. Оба глаза вывели в 100%.
Три недели ничего делать не мог, потом год ходил в темных очках, когда солнечно было.
Но в итоге зрение стало просто орлиным, могу иллюминаторы на летящих самолетах считать. 😃
А по поводу 500 и 600, понятно, что 600 стабильнее, больше таскает. Но и 500 спокойно утащит все оборудование, даже не заметит, а задушив микроба по циклику можно добиться вальяжности 600-ки. Есть ли еще причины в выборе более старшей модели?
Чем больше модель, тем потенциально большие (и опасные) последствия при отказе управления/видеосвязи. Я считаю, что пятисотка - это предел. Реально же хватает и 450-го класса для всех задач, с учетом большого прогресса в уменьшении размеров электронных модулей.
Облетал и настроил CopterControl на модели без флайбара. Летает замечательно!
Несколько ключевых моментов:
- Механика должна быть безупречна: гнутые валы, бабочку, заедание слайдеров и т.п. CC переносит очень плохо, впрочем, как и любая другая система.
- Для активного пилотажа максимальную угловую скорость по всем осям следует ставить на максимум гироскопов, т.е. 500 град/сек.
- Rate Ki для крена и тангажа не должны быть равны нулю, иначе любой ветерок наклоняет вертолет.
- Ki режима удержания должно быть достаточно большим, у меня равно 2,3, иначе хвост будет сдувать ветром или при быстрых боковых пролетах.
- Надо увеличить GyroTau, так как уровень вибраций на вертолете значительно выше, чем у остальных моделей.
Как понять, что подобный предел пройден?
А зачем вертолету вращаться с такой скоростью? Для любого пилотажа 720 гр/сек более чем достаточно, ИМХО.
Да, успехи небольшие есть. Облетал в флайбарном варианте (CopterControl выполнял роль хвостового гироскопа), впечатления отличные. Режим удержания для флайбара пока настроить не смог.
Облетал без флайбара. Тут есть замечания по скорости отработки управляющих сигналов по циклику и тангажу. Но все буду править коэффициентами, благо на форуме OpenPilot дали много дельных советов. Сегодня кинул вертолет в машину, попробую после работы подлетнуть с новыми настройками. Режим удержания на флабарлессе намного более адекватен.
В этой системе очень напрягает нестабильность подключения к компьютеру и странному пропаданию некоторых параметров. Вот вчера до полуночи сидел и разбирался с настройками. Модуль подключался и распознавался без проблем.
Сегодня с утра, ничего не меняя, включил систему и получил кучу проблем: данные с модуля считываются минуты через три, при этом входы-выходы не работают, на схеме отражены красным. При следующем включении пропали коэффициенты ССPM микшера, Pitch, Roll и Cycle почему-то обнулились. Зато входы с приемника загорелись зеленым, через пару минут.
Pitch passthrough не работает в принципе. Есть еще куча косяков, но я потрачу пару дней, прежде чем писать, чтобы быть точно уверенным, что это именно косяки.
Вчера разбирался с этой системой. Все достаточно нетривиально.
Из косяков:
- софт не работает полноценно из-под Windows 7 x64. Не работают входы и выходы PWM сигналов. Из-под Windows XP все сразу заработало.
- При настройке CCPM миксера все первоначальные значения импульсов ставятся в 1000 мс, в итоге сервы минимум три раза загоняются в крайние положения, что на собранной голове чревато проблемами. Намного логичнее начальные значения ставить в 1520 мс.
Максим подскажите, у Вас фаил сейв настроен так что бы верт оставался в висении, то есть с вкл. мотором?
Я общался с летчиком квадрокоптера., у него фаил сейв настроен в режиме висения., моторы вкл. оно то вроде не безопасно, но когда летаешь на дистанции, это уже необходимость, просто это надо учитывать.!
У меня фейлсейв настроен на сохранение всех параметров. Неоднократно были ситуации, когда пропадало управление (неверно выставил канал на видео передатчике и он глушил сигнал управления на 100 метрах), но вертолет стабилизировано летел до тех пор, пока сигнал не появлялся снова. Ставить фейлсейв на отключение двигателя и отрицательный общий шаг - 100% краш. А так есть существенный шанс вернуть модель.
Сергей, зачем вы чужие слова выдаете за мои цитаты? Цитируйте точнее.
Вот цитата про информацию: “Все остальные цифры будут только отвлекать, что для полете на FPV вертолете не приемлемо.” (с) KIR2142
Я с этим не согласен.
Поэтому мое мнение - копилоты и прочие флайменторы для FPV вертолета нафиг не нужны. Зачем? Так же считаю, что GPS телеметрия тоже будет на вертолете лишней. Ни одного важного параметра для контроля за полетом она не дает. Скорость? Тут нет скорости сваливания модели, точно вам ее знать не нужно. Высота? Вы не летаете за 1км в высь, вам ее знать не нужно, а у земли она чувствуется больше чем ее может замерить GPS. Направление на базу? В радиусе полета до 1км - смешно. Единственный важный параметра - напряжение батареи, его можно вывести хобикинговской OSD за 10$ или поставить перед камерой датчик с цифрами. Все остальные цифры будут только отвлекать, что для полете на FPV вертолете не приемлемо.
Какой бред! Т.е. закрывать 1/3 экрана для вас приемлемо, а информация на экране - нет. Если вы летаете все время в одном месте, то и не заблудитесь. А в новых незнакомых местах очень просто потеряться. И при краше удобно искать модель по координатам GPS. При пропаже сигнала стабилизация дает шанс избежать падения, проверено неоднократно.
Сейчас у вас такое мнение, потому что только начинаете летать FPV. С опытом придет понимание, что и стабилизация, и телеметрия просто необходимы.
Карбоновая балка ломается намного проще, чем алюминиевая. Ничего страшного с головой не происходит при ударе об карбоновую балку.
Карбон значительно легче, в этом его преимущество.
мне в прошлые подлеты показалось, что для посадки нужно сделать особый посадочный режим, в котором кривые шага минимально изменяются в районе висения. у меня шаги сейчас тупо прямая от -100 до +100 и при посадке получается так, что немного резковат по шагам, я бы уменьшил.
Садитесь в нормале, если так проще.
Но более правильно - это настроить экспоненты по каналу общего шага.