Activity
Открываю новую тему своего дневника - CopterControl проекта OpenPilot.
Стараниями Alkonaft43 я заполучил эту систему с твердым наказом приделать её на вертолет и настроить как следует. После знакомства с документацией и ПО модуль был установлен на тестовый клон 450-го класса.




ПО имеет поддержку наиболее популярных CCPM схем, но реально можно замикшировать что угодно, т.к. матрица микширования доступна для редактирования в режиме Advanced.
Достаточно хитро реализован алгоритм обработки сигнала газа и коллективного шага. Нейтраль выхода обозначает начало рабочего диапазона, поэтому для вертолетной конфигурации нейтрали газа и шага следует устанавливать в минимальные значения. Вот как выглядят мои настройки:


Я начал конфигурацию модуля с настройки хвоста. Первой целью стало использование CopterControl вместо штатного гироскопа. Для этого я оставил флайбар, отключил стабилизацию по тангажу и крену и поставил на канал руддера режим AxisLock. После множества подлетов в поле было найдено оптимальное сочетание параметров.
Вот видео настроек:
Вот файл настроек - pastebin.com/rzZyCrZn
Сейчас занимаюсь настройкой режима стабилизации по каналам и режим выравнивания.
Продолжаю описывать свой проект. Начало тут.

На электронных компонентах было решено не экономить. Экономия вообще чужда понятию “идеальный”. 😁
Поэтому комплектующие выбирались тщательно и по характеристикам, а не по цене.
Сначала необходимо выбрать напряжение питания. По этому поводу есть замечательная статья Дмитрия Деригина.
Рабочее напряжение выбирается в зависимости от веса модели и диаметра ротора. В моем случае диаметр ротора составляет 790 мм, вес около 1400 грамм. Далеко не 450-й класс, согласитесь!
По формуле Дмитрия Uv=(Pkg +Dm)*10 находим расчетное напряжение питания: (1,4+0,79)*10=21,9 В. Следовательно надо ставить батарею 5S, и дальше рассчитывать силовую часть исходя из этого значения.
Двигатель.
Дано:
- напряжение питания 5S (номинал 5*3,7=18,5 В).
- передаточное число трансмиссии 150/11=13,(63) , где 150 - количество зубьев на главной шестерне, 11 - количество зубьев на пиньоне двигателя.
- желаемые максимальные обороты несущего ротора - 3100 об/мин.
Высчитываем kV двигателя. 3100/18,5*13,(63)=2285 об/В. К сожалению, двигатели не обладают 100% эффективностью, поэтому надо вводить поправочный коэффициент. Я взял с запасом - примерно 15%. В итоге расчетное kV двигателя составило 2600.
Изготовление двигателя заказал Александру (HiVolt). Качество его изделий высочайшее, полностью соответствует требованиям “идеального” вертолета.

Контроллер скорости.
Тут я не буду оригинальным, все контроллеры скорости у меня Markus. По поводу этих контроллеров я писал обширную статью. В данном случае я просто настроил режим гувернера.

Аккумуляторы.
На Хоббисити заказал самые простые аккумуляторы 5S 20С, один на 3000 мА/ч, второй 4000 мА/ч. Пробовал летать с обеими, летает замечательно, несмотря на внушительный вес. С аккумулятором 4000 мА/ч расчетное время полета должно превысить 20 минут. Но пока не проверял на практике. Реально отлетал 10 минут и истратил меньше 50% заряда. Попробую полетать 20 минут.

Сервоприводы автомата перекоса.
Выбрал “классику”: Hitec HS-5065MG

UBEC на 3А, работает в режиме 5В.

Преобразователь напряжения Traco Power TEN 15-2412. Необходим для стабилизации питания видео-передатчика. Полностью исключает появление полос на изображении при работе двигателя.

Система стабилизации Helicommand Rigid.
Система стабилизации и виртуальной сервооси. Два в одном.
Очень полезная система для полетов по камере. Особенно сильно она помогает при посадке, т.к. зафиксировать вертолет в точке по очкам очень сложно. Система удерживает вертолет в одной точке на малой высоте, и вся посадка сводится к аккуратной работе коллективным шагом.

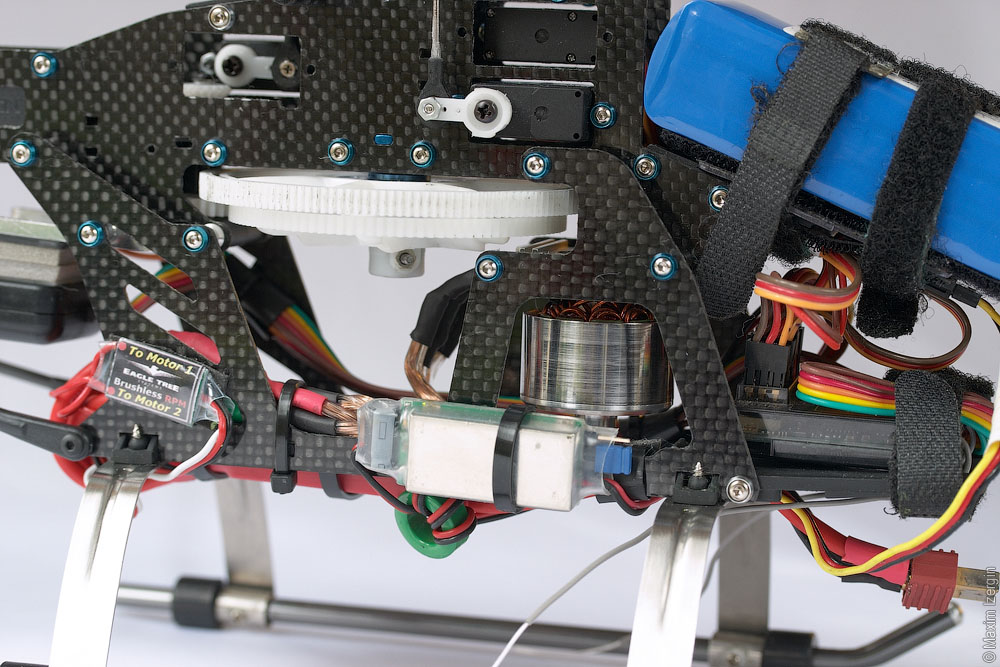
Телеметрия EagleTree.
Логгер EagleTree MicroPower E-Logger

Бародатчик Altitude MicroSensor V3


Eagle Tree Video OSD Pro Expander

MicroPower Brushless Motor RPM Sensor

Видеопередатчик MN-211A на 1 Вт.
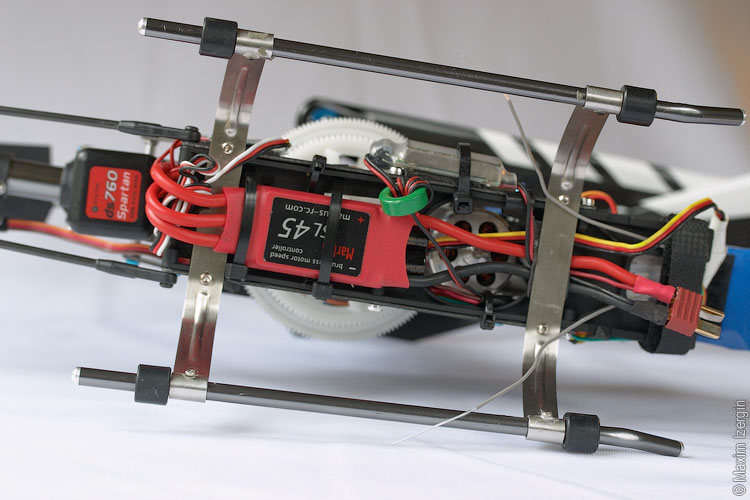
Все это подключено и аккуратно размещено на корпусе модели.

Продолжение следует…
Наконец-то нашел время описать мой масштабный проект “Идеальный вертолет для FPV” в деталях.

На продумывание и реализацию компоновки было затрачено полгода времени и много-много денежных знаков. 😁 Сейчас я уверенно могу сказать, что добился более или менее оптимального соотношения “качество видео” - “комфортность управления” - “длительность полета”. Данная статья подводит итог всем моим изысканиям и будет помогать “последователям” делать первые шаги в полетах по камере на базе вертолета 450-го класса.
Начнем с содержания. Итак, что потребуется для постройки вертолета. Я приведу описание и ссылки на детали, доступные в продаже на момент написания статьи (сентябрь 2010). Если я даю ссылку, это не означает, что я покупал именно это и именно по текущей цене. Дело в том, что многие и существующих наборов еще полгода в продаже не существовали, а цены на запчасти, особенно электронику, падают чуть ли не еженедельно. Однако я заявляю, что ссылки на компоненты позволят построить идентичный вертолет, скорей всего за намного меньшие деньги.
Разделю комплектующие на две группы: механика и электроника.
Механика.
Рама:
Кит клона Т-Рекса 450 с карбоновой рамой и алюминиевыми деталями.

У меня за основу был взят самый первый алюминиево-пластиковый клон с ХС, который я потом почти полностью проапгрейдил, осталась только нижняя площадка рамы, все остальное было заменено.
Площадка для гироскопа Microheli.

Шасси:
Увеличенные шасси.


На лыжи шасси надета мягкая легкая трубка от изоляции кондиционеров.
Подвес для камеры.
Делал его сам, без оглядки на аналоги. Подгонял все по мере сборки, никаких расчетов и чертежей не готовил. Держатели амортизаторов (они же перила для крепления электроники) сделал из карбоновых подкосов хвоста. Прямоугольные пластинки по краям шасси вырезал из миллиметрового карбона. Пластиковые крепление “перил” приспособил из элементов верхней части пластиковых амортизаторов модели Tamiya DF03-Ra.
Амортизаторы для демпфирования подвеса взял такие.

Можно взять попроще, пластиковые.

Нижнее крепление амортизатора сделал из шарикового шарнира и декоративной шайбочки М2, вклеив их эпоксидкой в вал амортизатора. Потом этот шариковый подшипник вставляется в пластиковый закрытый разъем, который я нашел среди запчастей для машины Tamiya DF-03.
На месте крепления штатной батареи я разместил крепление подвеса для камеры. Все детали вырезал из карбона, для подвижности крепления использовал упорные подшипники. Подвес для камеры имеет одну степень свободы (легко вращается относительно оси крепления), второй край подвеса крепится к амортизаторам, далее вешается камера.
Для демпфирования вибраций я использовал двухслойный “бутерброд” из поролона разной степени мягкости. Снаружи жесткий, внутри слой более мягкого.

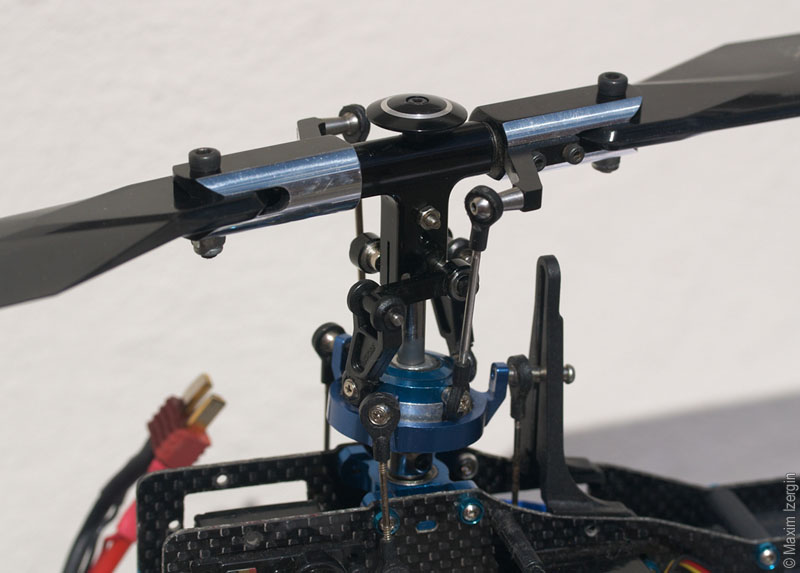
Голова:
От использования сервооси я сразу отказался, так как требовалось максимально легкое и эффективное решение. Выбор пал на клон головы RJX.

Особых претензий у меня нет, однако надо очень строго следить за качеством центрального хаба, мне из трех хабов один попался с нарушением соосности, из-за этого были неустранимые вибрации.
Лопасти:
Так как вес модели значительно превышает первоначальный, то необходимо использовать более длинные и широкие лопасти. Можно взять подороже, или подешевле. Я пробовал оба варианта. В полете особой разницы нет, а вот при авторотации первый вариант предпочтительнее, так как Радиксы заметно тяжелее и накапливают большее энергии.

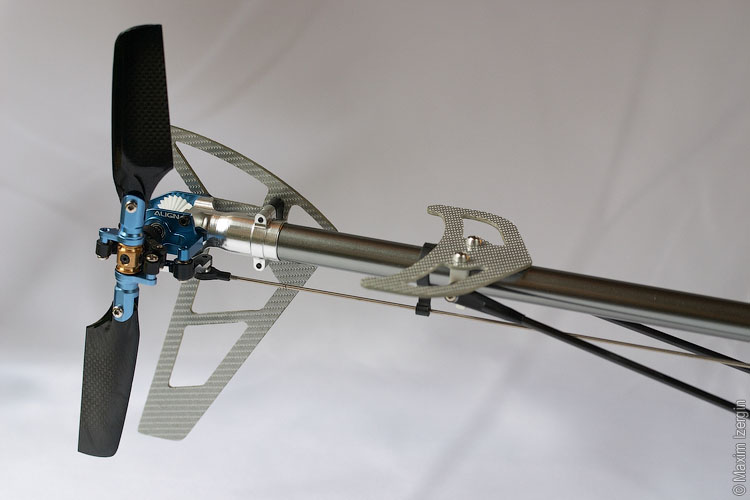
Хвост:
Карбоновая балка,
Оригинальный алайновский апгрейд на вал (450V3 Torque Tube Drive Assembly (HS1298))
С механикой вроде все.
На подходе самое интересное: электроника, компоновка, настройка, тесты. Так что будет еще четыре статьи. 😒
Вчера завершил сборку нового подвеса для камеры, уложил все провода, проверил настройки, зарядил все батареи. Получилось очень аккуратно и красиво. Тестовое висение в комнате показало существенное снижение вибраций камеры.
Сегодня утром бросил вертолет в багажник машины; после работы произведу проверочный полет в поле. Если все пройдет успешно, то можно считать проект завершенным. Засяду писать длинную статью про все ньюансы сборки и настройки. С фотографиями конечно. 😃
UPD. Только что вернулся с поля, с тестового полета.
Получилась полная фигня, новая версия подвеса просто никакая, камеру бросает из стороны в сторону на километр. 😦
Буду все переделывать, есть еще пара идей. Так что никакого описания пока выкладывать не буду.
Вчера состоялся второй успешный полет по камере. В текущей конфигурации вертолет очень хорошо и предсказуемо управляется даже в приличный ветер. При снижении почти всегда возникает флаттер на лопастях, на экране видно сильную тряску. Взлетный вес с батареей 4400 4S получился 1427 грам, что для 450-го класса очень много. Но динамика очень даже приличная, а на 10+ минут полетного времени тратится 3000 мАч. Времени более чем достаточно, чтобы получить свою дозу адреналина.
Вот запись с камеры на борту:
Посадка, конечно, получается пока не очень. В этот раз я порубил на кусочки какое-то многолетнее растение высотой около метра. Но потерь нет, лопасти в порядке. Самый кайф при полетах на вертолете по камере - это медленные пролеты с зависаниями на низкой и сверхнизкой высоте. Самолету такое недоступно. Но я проверил как высоко хватит у меня смелости забраться. Получилось 446 метров от поверхности и более семисот метров от базы. Видео пропало секунд на десять и я решил вернуться (вслепую, но интуитивно управляя вертолетом). 😃 Надо что-то делать с приемной антенной для видео.
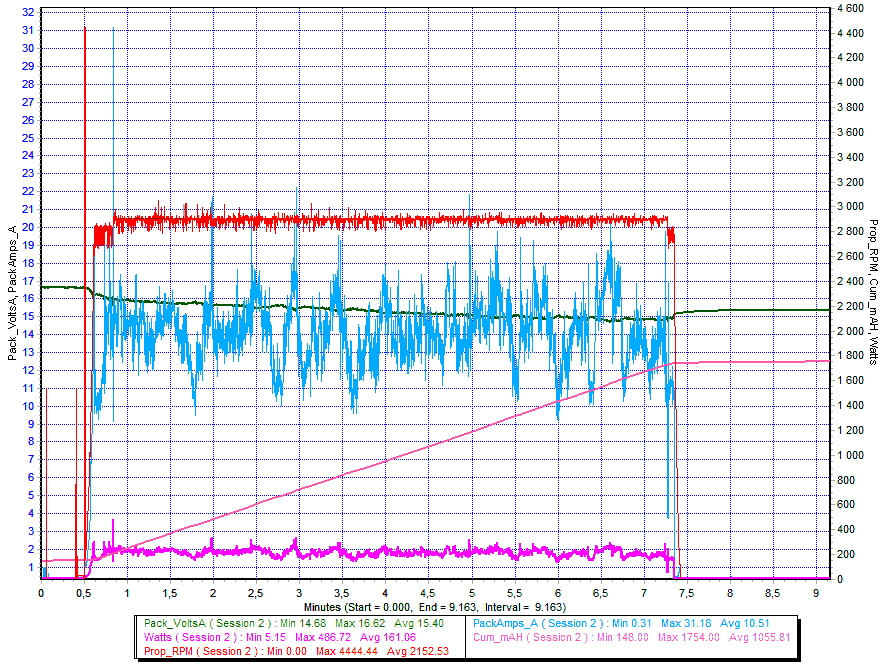
Вот телеметрия всего полета (по клику полный размер):
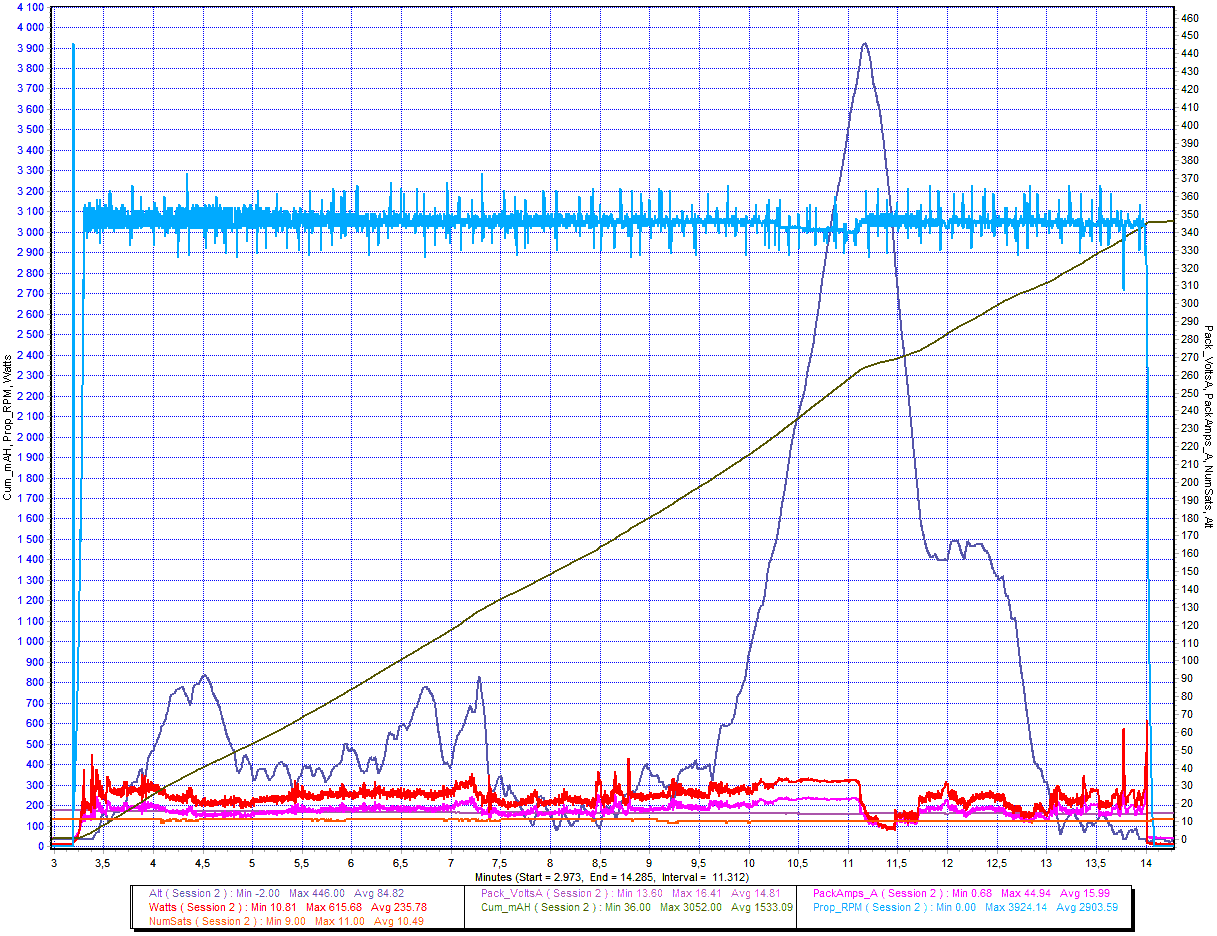
Видны максимальные значения высоты, расход батареи и т.д.
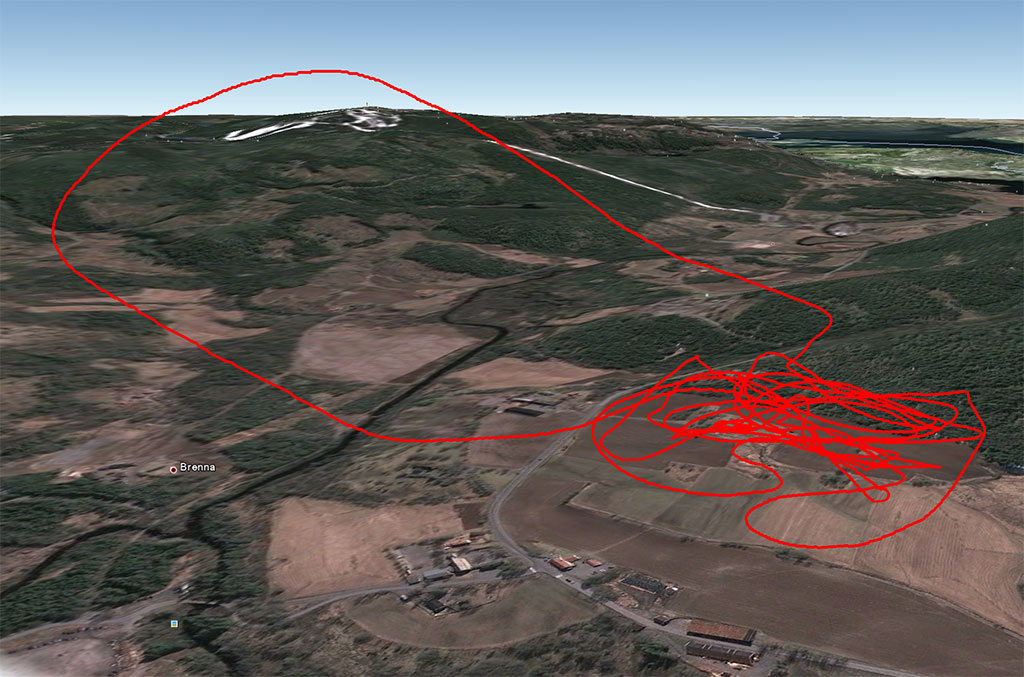
А вот как выглядел полет после загрузки GPS трека в Google Earth:
Сегодня потратит 12 часов на финальную сборку своего вертолета для FPV. И все равно он пока не готов… 😵
Но электроника вся подключена и проверена, все работает. Для камеры сделал новый подвес, буду экспериментировать с жесткостью амортизаторов количеством поролона. Вибрации терпеть не собираюсь… 😃
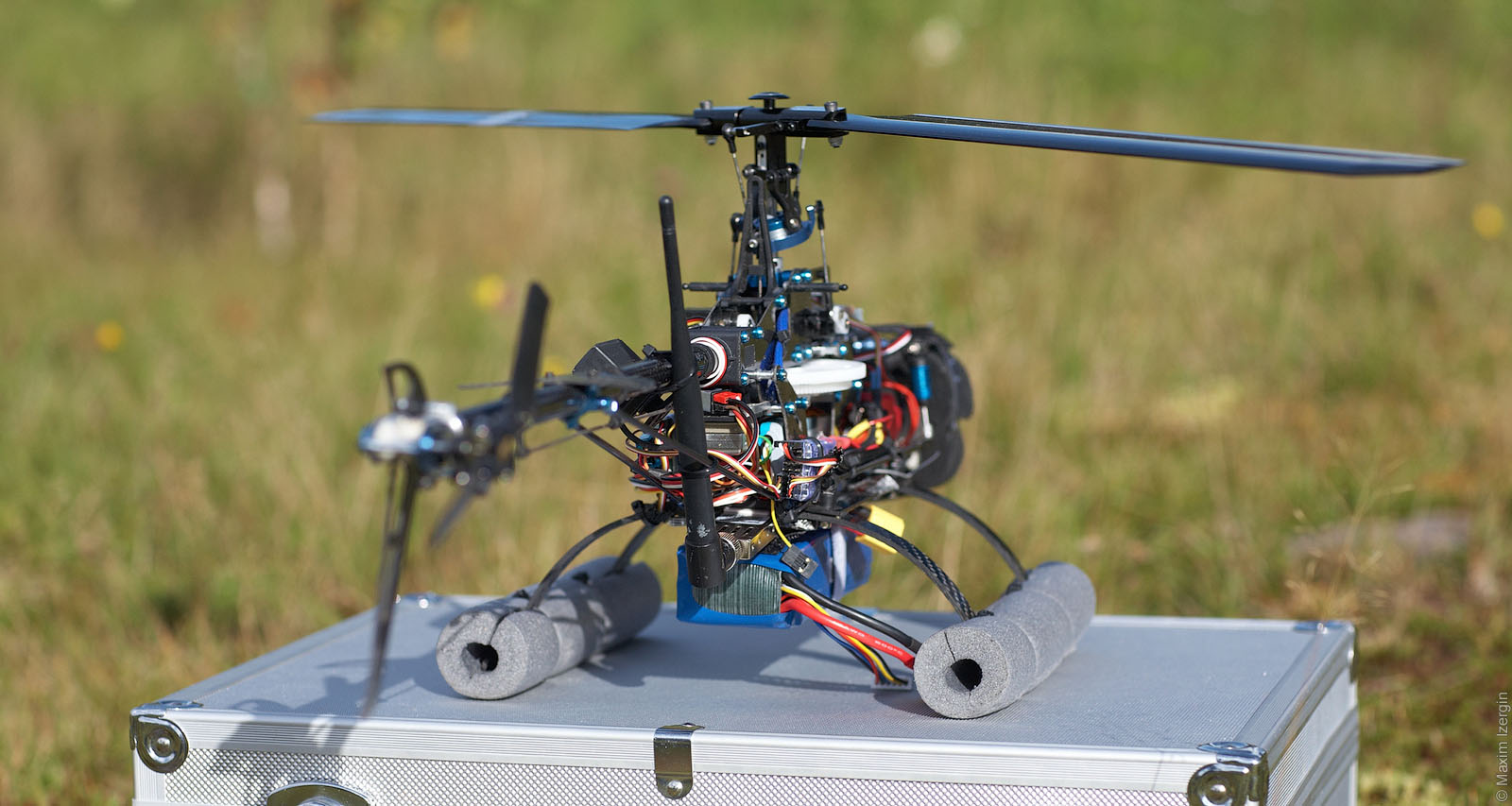
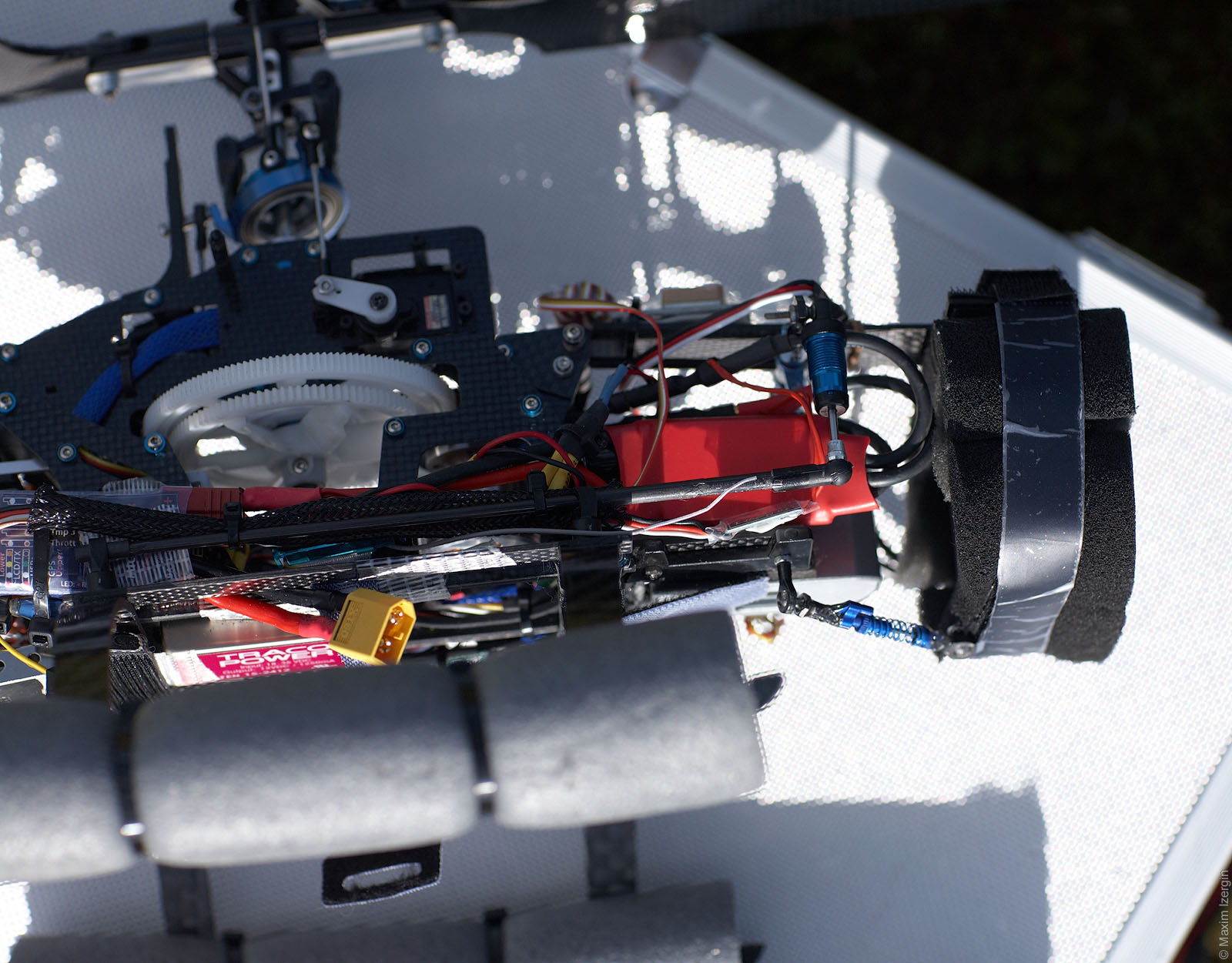
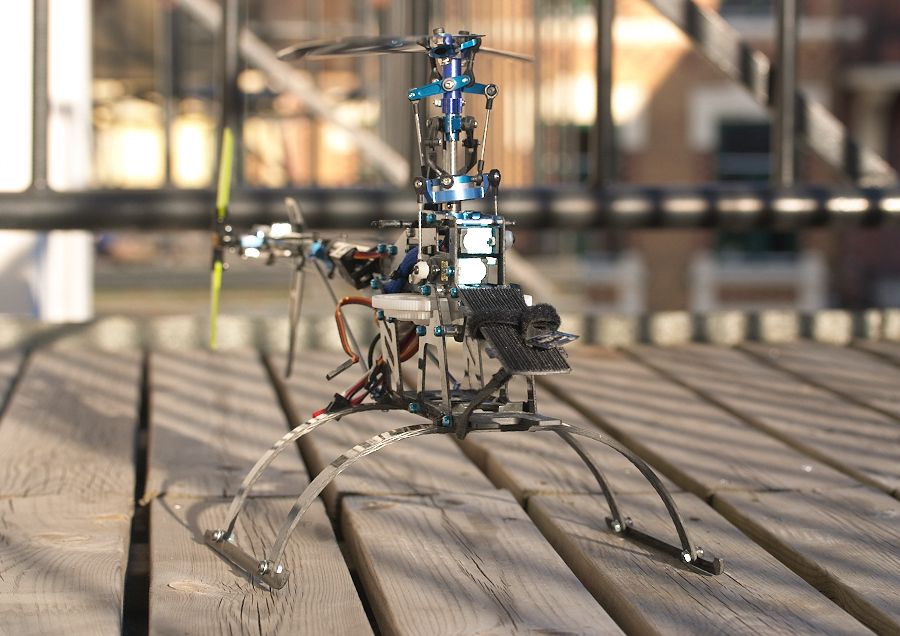
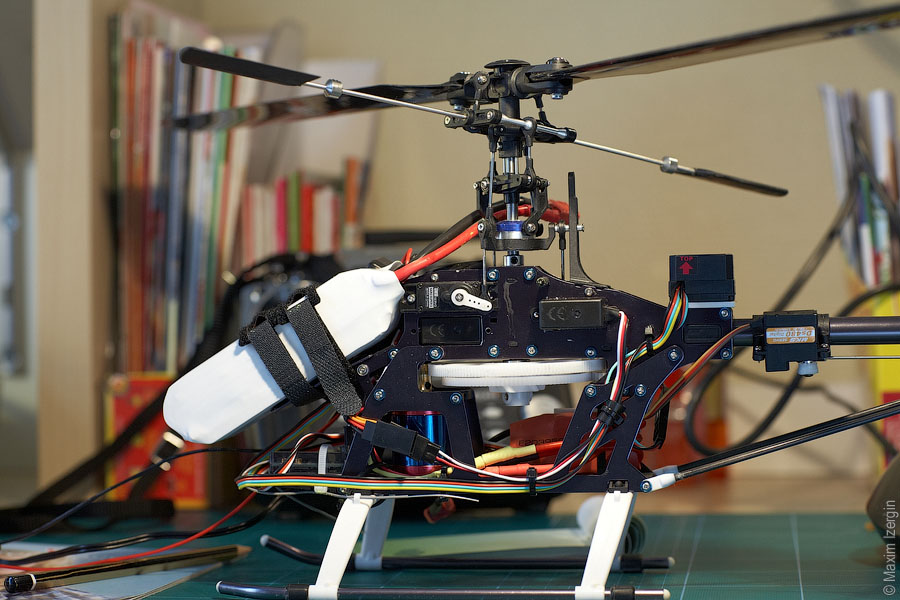
Вот какой “Франкенштейн” получился:
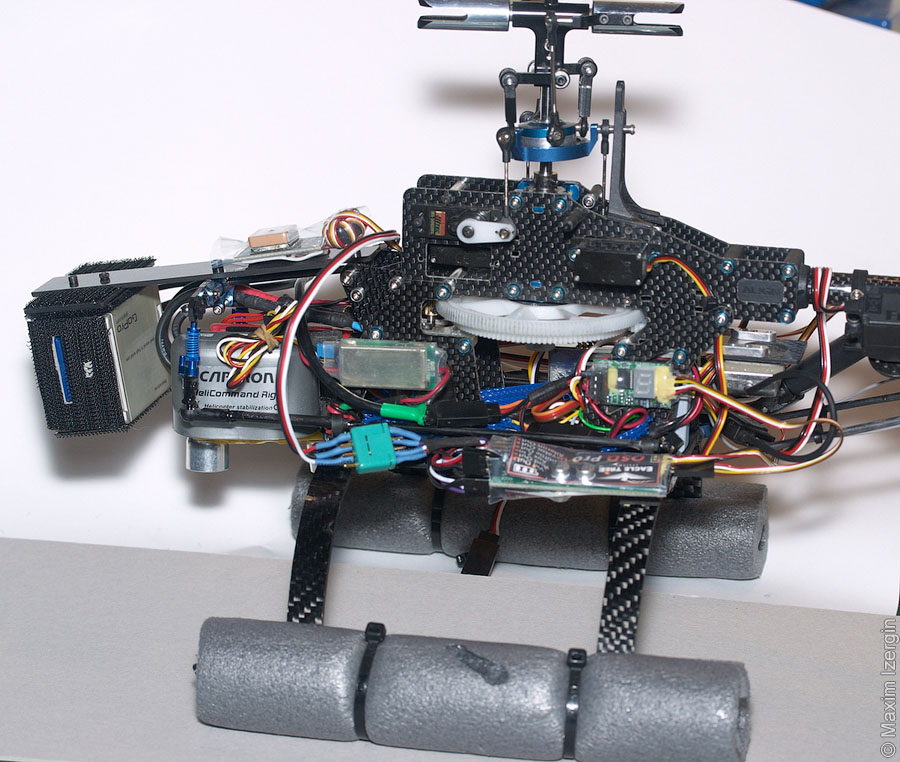

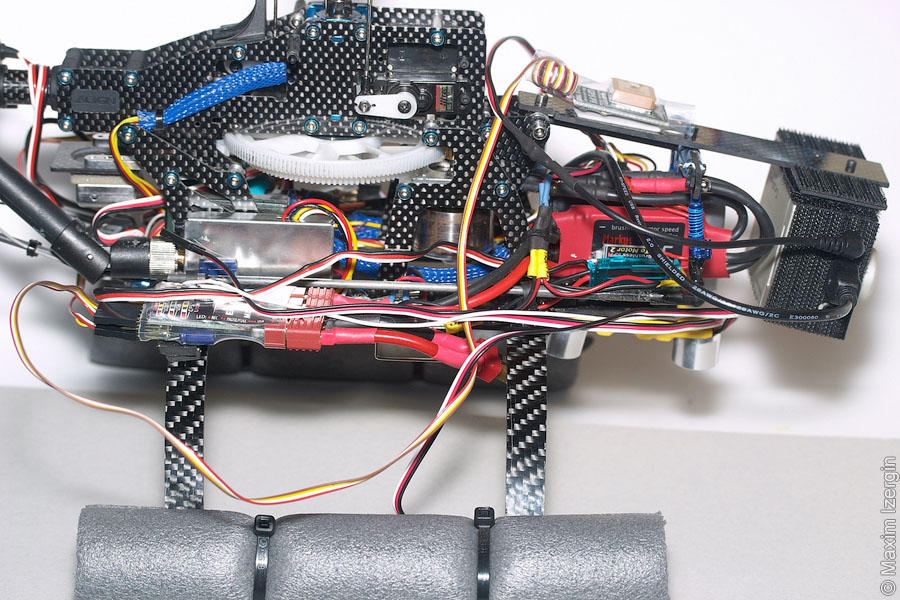

Надо уложить провода, поставить батарею, лопасти; настроить центровку.
Хотел сегодня облетать, но не получилось, увы. Постараюсь завтра-послезавтра. 😃
Полетал вчера и сегодня на природе с камерой. Закутал её в поролон, поднят обороты на роторе. Пока значительного уменьшения вибрации не заметил, увы. Буду думать об изменении механики подвеса.
Вот пара сюжетов, остальное попозже выложу.
Несколько фотографий:


Напоминаю, что я строю идеальный вертолет для FPV на базе 450-го класса.
Сегодня после работы поехал в поле попробовать новую конфигурацию с камерой и батареей 4S 4400 mAh. Повесил логгер для анализа работы силовой установки.
Очень переживал, что адекватного управления при весе 1254 грамма не будет. Сомневался, что модель вообще взлетит. 😃
Тест, не смотря ни на что, можно признать успешным. Был сильный ветер, у меня был мандраж по поводу всех переделок, поэтому я не летал, а висел. Провисел шесть с половиной минут, за это время израсходовалось 1600 мА. Результат отличный, можно уверенно летать 15 минут и более.
Динамика, безусловно, пострадала. Но не катастрофически. Модель адекватна в наборе высоты, отлично противостоит порывам ветра. Резкие подрывы я пробовать не стал, боюсь, что может срезать основную шестеренку.
Вот показания логгера:
А вот видео с борта.
Я вырезал несколько совсем скучных частей, но все равно особо смотреть не на что. Самое важное - оценка вибраций. Не смотря на мою хитроумную систему крепления камеры и встроенную стабилизацию, хорошей картинки я получить так и не смог. Вибрация заметна и она меня очень раздражает. Буду искать варианты решения этой проблемы.
Напоминаю, что я строю идеальный вертолет для FPV на базе 450-го класса.
Решил написать небольшой анонс.
Сегодня закончил изготовление подвеса для камеры. Старался сделать нечто модульное и легкое. Помучался два дня, но вроде доволен результатом.
Основная камера у меня GoPro Hero HD, но летать по ней пока нельзя, надо ждать обновление прошивки. Есть еще обычная камера для полетов, её тоже можно ставить в изготовленный подвес.
Вот что у меня получилось (фотографировал на скорую руку, так что сорри за качество изображений):
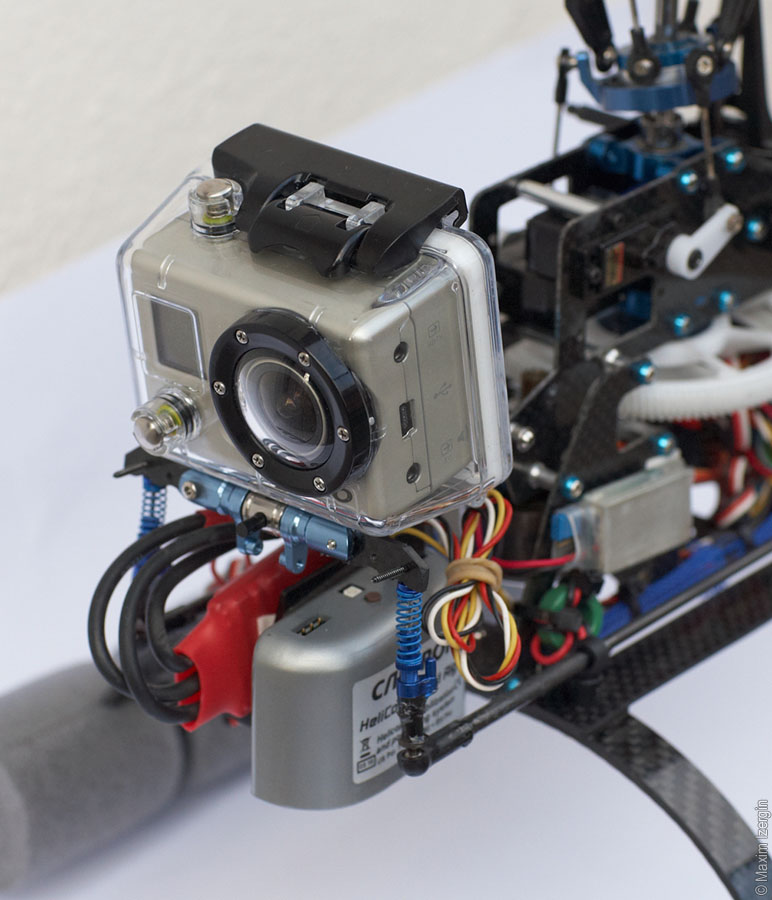
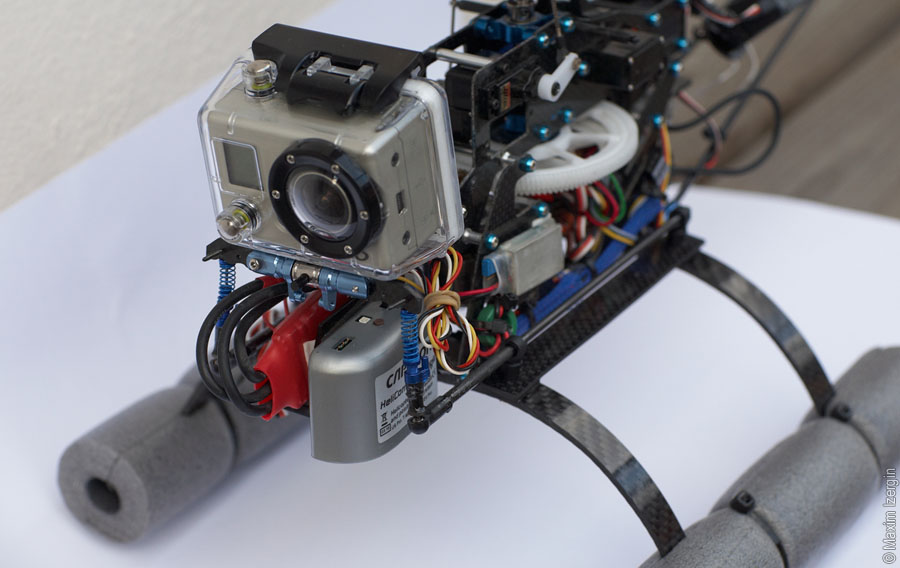
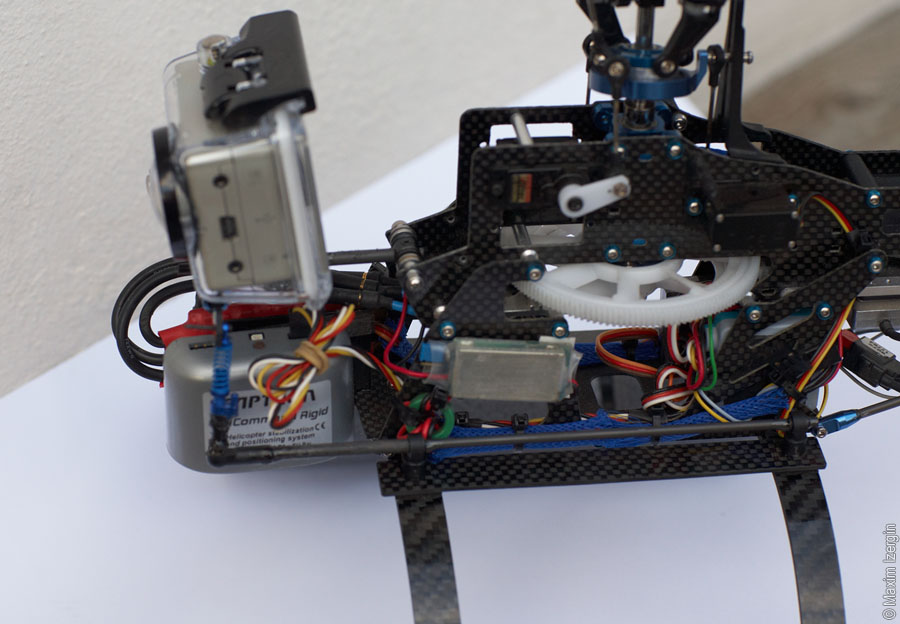
Для демпфирования колебаний подвеса использовал регулируемые амортизаторы от маленькой машинки.
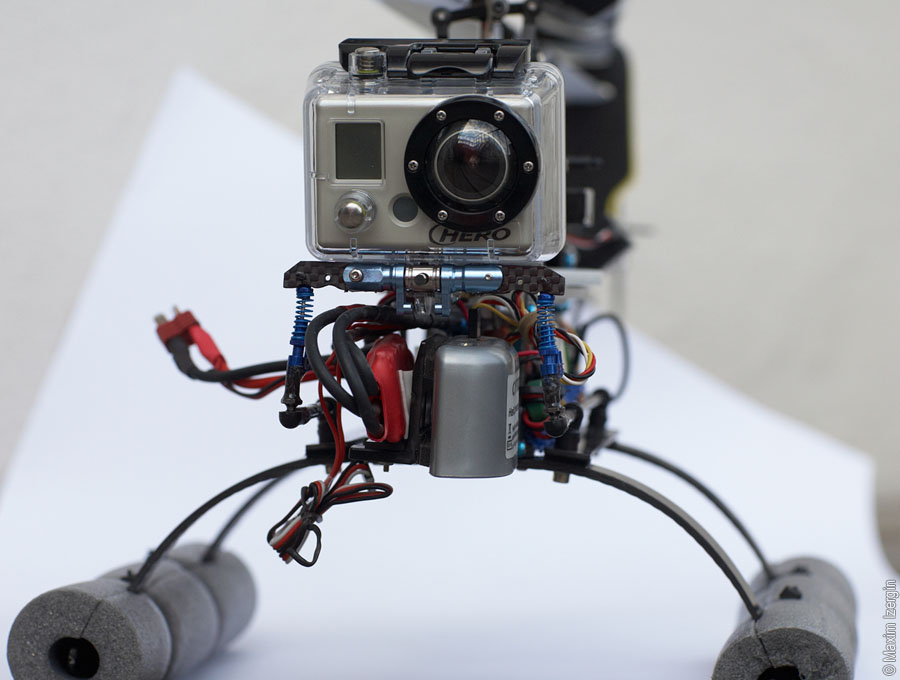

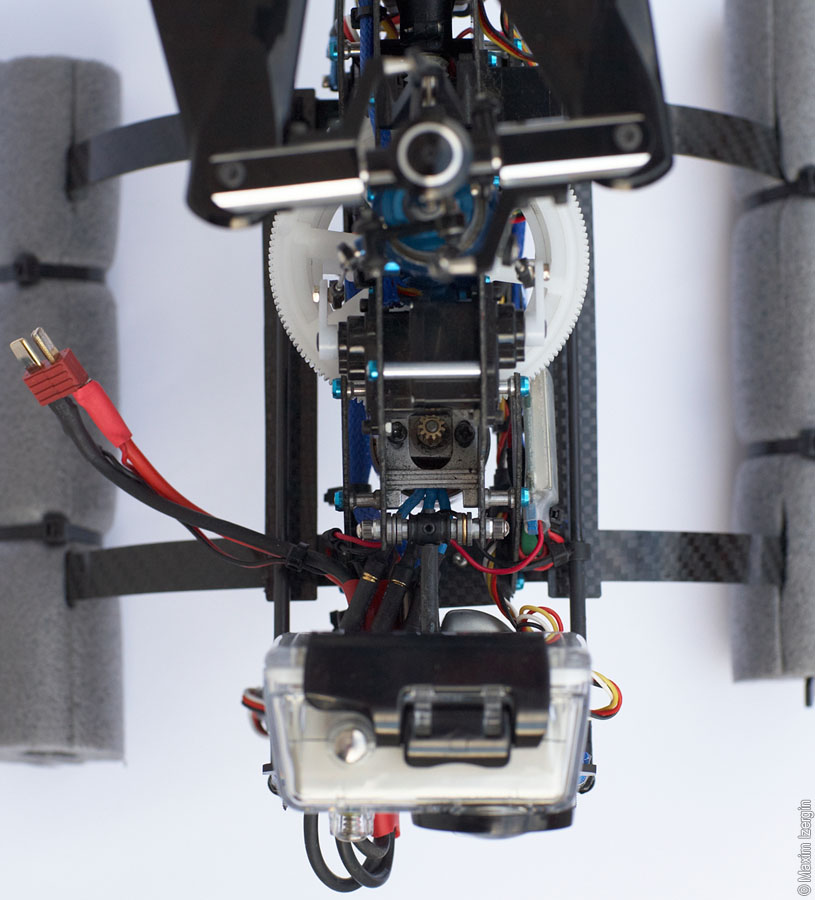
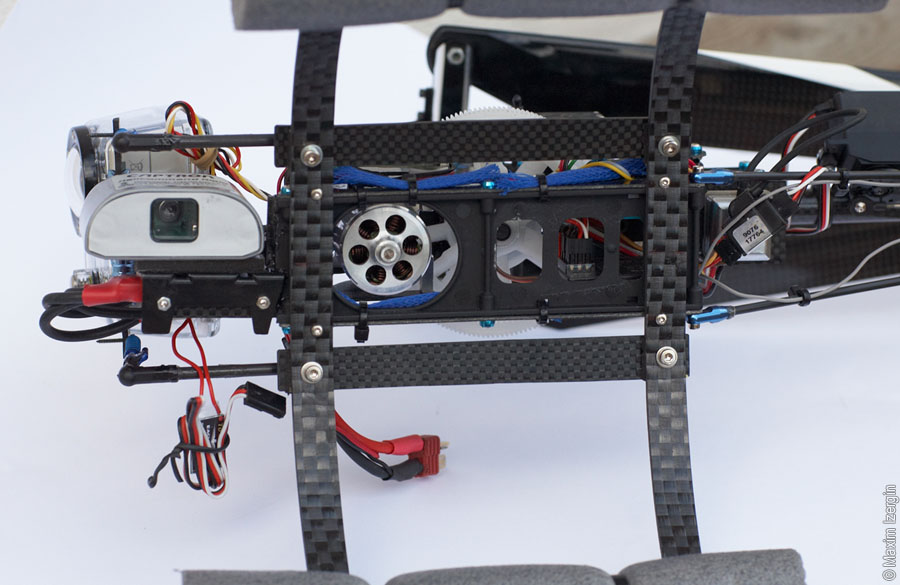
Установил две карбоновые пластины вдоль корпуса для дальнейшего крепления аккумулятора и телеметрии. Попробую поставить 4400 4S, посмотрим, сможет ли взлететь. 😃 Вес полностью снаряженного вертолета БЕЗ батареи составляет 890 грамм. Лопасти у меня 350 мм, так что есть шанс нормально летать с весом 1200-1300 грамм. 😵
Есть еще много мелочей, которые надо устранять. Тестовый облет намечен на следующие выходные. Еду в горы, попробую взять верт на восхождение и записать видео моего триумфа на вершине с высоты птичьего полета.
Подробный отчет по постройке выложу после удачных испытаний.
Я достаточно лоялен к клонам, с них начинал, без них вход в хобби был бы невозможен.
А вчера из-за дешевой китайской фигни у меня чуть не случился краш модели ценой около килобакса.
Купил я недавно карбоновые лопасти для хвоста на Хоббисити. Вот такие:

Выглядят красиво.
Вчера при пируэтах начало сильно трясти хвост, а потом закрутило волчком. Щелкнул холд и чудом выровнял модель, затем очень красиво посадил на авторотации. Это была первая авторотация в реале. Спасибо симулятору и тяжеленным лопастям Radix 350 мм. С ними 450 верт авторотирует как пятисотка.
Оказалось, что одна хвостовая лопасть просто-напросто отлетела. Винт крепления в цапфе остался на месте, а лопасти нет. С одной лопастью и начался ужасный расколбас, от динамических нагрузок даже повредило пластиковые шестеренки в хабе привода ХР. Других повреждений благодаря мягкой посадки нет.
Вечером поставил штатные пластмассовые лопасти, в них я абсолютно уверен.
Начал новый проект - идеальный вертолет для FPV на базе 450-го клона. Для этого я буду брать только лучшие комплектующие и электронику.
Буду описывать процесс шаг за шагом.
Сегодняшний пост про шасси. Для полетов по камере важнейшим параметром является вес модели. Чем меньше вес, тем больше полезного оборудования можно навесить, тем дольше время полета. Поэтому мелочей быть не может.
Необходимы максимально легкие и прочные шасси. После недолгих поисков в сети обнаружил, что такие шасси продаются на сайте rc-carbon.com. Заказал там увеличенные шасси для 450-го класса, предварительно списавшись с владельцем сайта Сергеем. Очень отзывчивый человек, спасибо за индивидуальный подход и быстрое выполнение заказа.
Сегодня получил посылку с деталями:

Как я понял, Сергей не гнет карбон, а выклеивает уже по нужному профилю. Это очень положительно сказывается на прочности. Заодно я заказал там карбоновое оперение для своего клона, а одну дополнительную стойку для шасси Сергей мне послал в качестве бонуса. 😃
Для установки шасси на модель необходимо было просверлить крепежные отверстия. Пара минут работы Дремелем, и все готово:

Получилось очень даже прилично, места для FPV оборудования достаточно. Высота 70 мм, ширина 180 мм. Вес - 35 грамм. Штатные пластиковые шасси весят 24 грамма, но они не позволяют повесить камеру между ними.
Одним словом, очень я доволен.

Надеюсь, что в течение месяца проект будет готов, у меня есть почти все оборудование. Жду последние три посылки.
Подарил жене на 8 марта инновационный смартфон от Google. К сожалению, из-за жлобства FedEx посылка пришла только сегодня, два дня валяясь на складе со статусом “Package not due for delivery”. Типа “заплатил за доставку за пять рабочих дней, вот и получи через пять дней, и нам пофигу, что она пришла на два дня раньше, будем держать на складе, но тебе не выдадим.” Ну это мелочи.
Телефон пока у меня, торжественно заряжается. Буду вручать подарок вечером. Кстати, заказывал аппарат с гравировкой, есть такая опция при заказе напрямую от Google (впрочем как и при заказе что-либо от Apple). Так что получит у меня жена именной телефон. 😃
Если жене понравится, возможно и себе возьму такой же, а то Нокия задолбала уже.
Заметил, что у меня слишком много запчастей для вертолета. Решил навести в них порядок, и у меня получился новый вертолет. 😃
Рама алюминиевая, на хвосте ремень, шасси штатные от HK-450, батарея 4S. С такими комплектующими рискованно летать не страшно. Стоимость краша минимальная.
При настройке заметил, что динамика вертолета при полетах по кривым просто бешеная. С гувернером все намного плавнее. Странно это как-то… 😃
Но я решил, что помимо тренировок новых элементов пилотажа, буду этот вертолет использовать для FPV. Комплект 1,3 ГГц у меня уже куплен, надо набраться смелости и начать летать.
А свой первый мега-навороченный пилотажный вертолет буду использовать для удовольствия, летать на нем буду только проверенные фигуры.

Поставил недавно лопасти длиной 360 мм на свой “HK-450”. Лопасти от Outrage G5, на 35 мм длиннее и на 2 мм шире стандартных от 450го.
Полетал сегодня в порывистый ветер. На поле был чувак с ветромером, намерил порывы до 8 м/с. Вертолет летал как по рельсам. Другой чувак в поле отказался летать на 500ке из-за ветра, и смотрел на меня как на сумасшедшего. Но потом долго жал руку и удивлялся как я не раздолбал вертолет. 😃
А на самом деле ничего сложного не было, действительно с этими лопастями летать стало очень просто и предсказуемо. Теперь я с них не слезу никогда.

Мой клон HK-450 восстановлен после разрушительного седьмого краша.
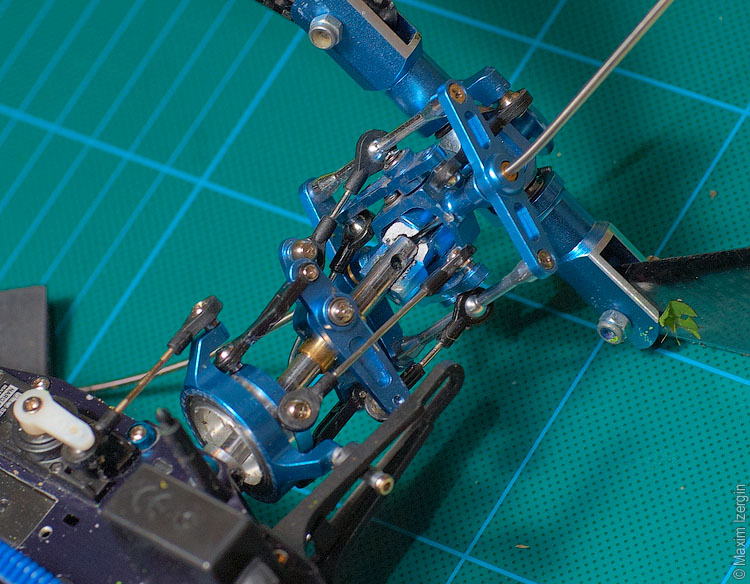
Помимо карбоновой рамы, площадки по гиросокоп и новых сервоприводов, вертолетик получил новый хвост с валом.

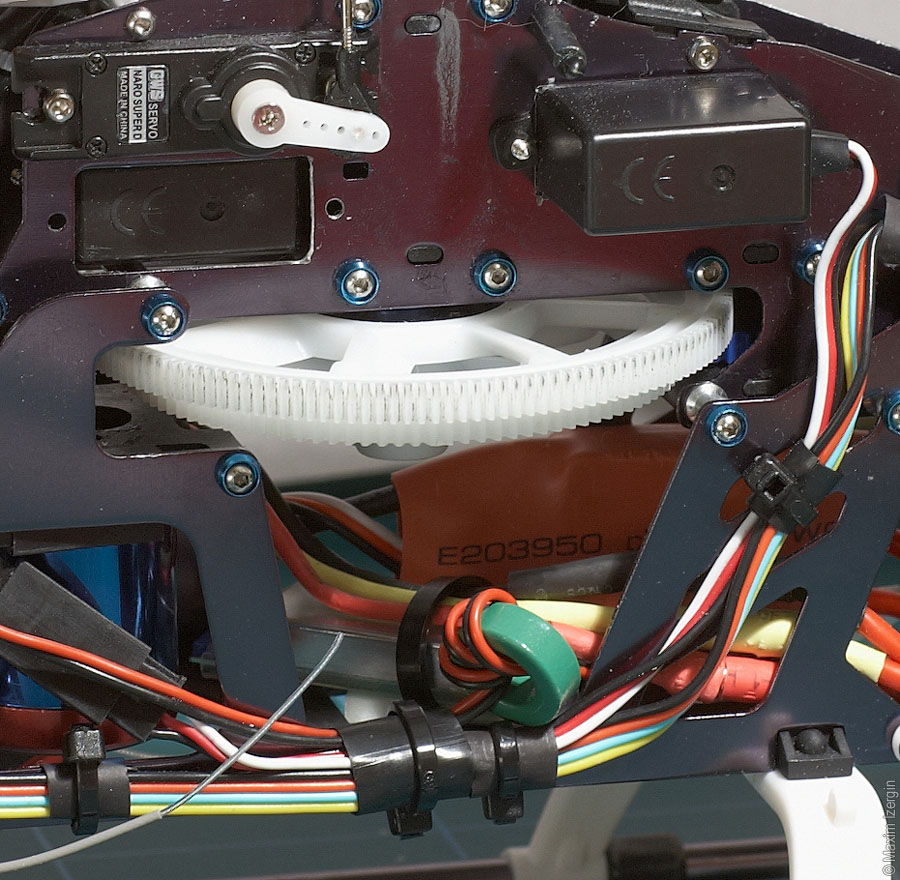
Для того, чтобы качалка сервопривода тарелки перекоса не касалась шестеренки, пришлось у этой качалки аккуратно снять фаску.
После сборки покрутил немного руками и двигателем.
Разница по сравнению с ременным приводом огромная. После остановки двигателя ротор крутится секунд двадцать, не меньше. Раньше крутился секунд пять.
Уверен, что смысл в установке вала есть, и очень значительный. Как только перестанет дождь, облетаю новый вертолет и посмотрю сколько будет полетное время до отсечки.
Вот как сейчас выглядит мой китайский клон HK-450:

Можно кликнуть для увеличения.

Сейчас вот думаю: “Чем же мой клон хуже настоящего вертолета Align?” 😃
Наконец-то я получил моторчик Хайвольт. Спасибо огромное Александру за логистику. 😃
В этой теме я буду выкладывать все полученные знания об этом моторе.
Итак, бесколлекторный двигатеть серии 2312/410. Вот параметры производителя:
- диаметр статора 23мм,
- длина статора 12мм,
- Кv = 4100 об/В,
- диаметр вала 3 мм,
- рекомендуемая частота ШИМ - 12 кГц,
- рекомендуемый угол опережения (timing) - 15-20 градусов.
- Максимальный продолжительный ток - 30 А,
- Количество полюсов - 6,
- Ток холостого хода - 2.6 A,
- Сопротивление - 12.5 мОм.
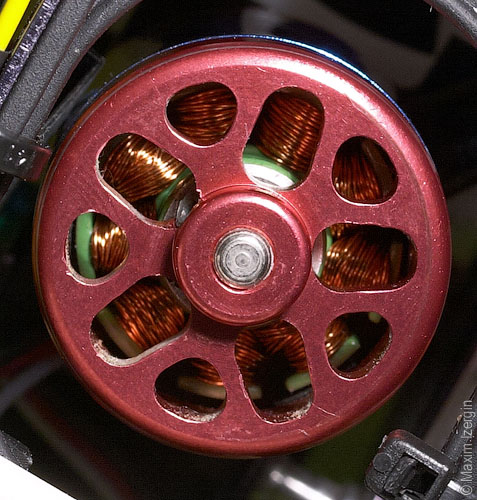
Сразу видно, что мотор ручной работы, намотка выполнена толстым медным проводом, очень аккуратно:

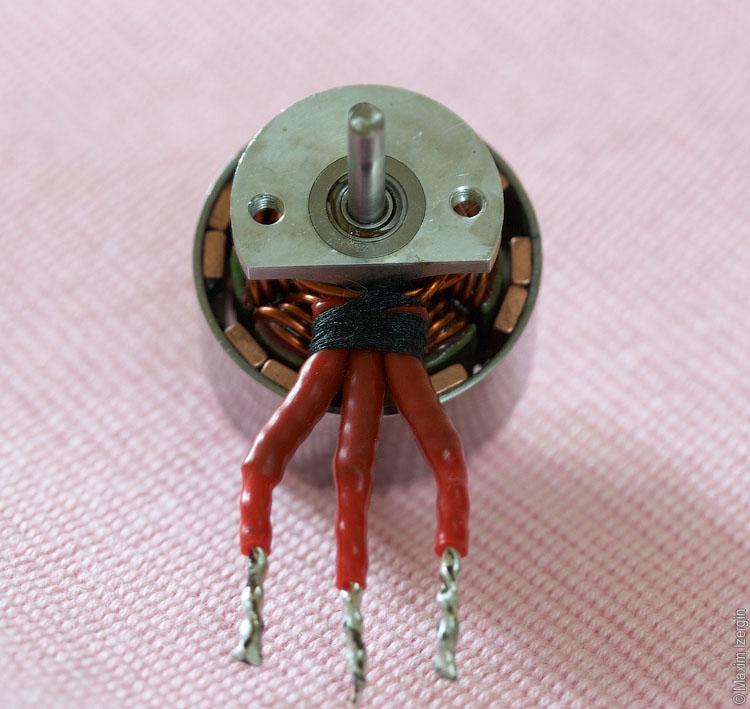

Неудобство доставили только короткие концы проводов, пришлось удлинять. Но это частный случай, у остальных это может не вызвать проблему. Я использовал акустические провода крупного сечения из безкислородной меди. 😃

Вал двигателя 3 мм. Это отличается от стандартных 3,17 мм. В комплекте была медная лента толщиной 0,08 мм, поэтому установка стандартной шестерни пройдет без трудностей. Я же сумел купить шестерню с посадочным диаметром 3 мм.
При настройке поставил частоту ШИМ 12 кГц, угол опережения - 21 градус, шестерня 11T.
При эксплуатации настоятельно рекомендуется использовать внешний BEC.
Вечером попробовал новый мотор. Времени было мало, т.к. начинался дождь. При 3000 об/мин на роторе резкие изменения шага не вызвали провала оборотов. Звук работы двигателя даже не изменился. Впечатления очень приятные. Буду изучать этот замечательный мотор дальше…
UPD 21.08.09:
Сделал подлеты с логгером, вот что получилось.

42 ампера в пиках, это прилично. Мотор и регулятор были слегка теплые. По ошущениям при взлете отстрел очень хорош, а вот из висения подрывает без особенного энтузиазма.
После установки вала на хвост я достаточно энергично летаю 9 минут на стандартной батарее 3S 2200 мА/ч.
Вчера я уронил вертолет и поломал лопасти и алюминиевую голову.
Весь вечер сидел и чинил, поставил пластиковую голову, все заново отстроил, проверил.
Сегодня в обед пришел на поле и с огромным удовольствием отлетал 4 пака. У меня стали получаться плавные пролеты слева направо и обратно. Стабильно висел обоими боками.
На пятом паке ничего не предвещало беды. Вдруг вертолет резко завалилися на правый бок и упал на землю. Я видел этот маневр, пытался его парировать, но вертолет совершенно не слушался. Холд я опять не успел включить вовремя, более того, включил Idle2, вместо холда, кошмар, короче.
Дефектовка показала, что вышла из строя левая серва, застыла в верхнем крайнем положении. Шансов спасти вертолет не было, т.к. что что-то замкнуло в электрической части сервы, и из-за этого все остальные сервы беспорядочно дергались.
В минусе:
- Пластиковая голова (хаб, качалки, рамка, промежуточный вал, цапфы, короче все, кроме тарелки перекоса).
- Супер-пупер прочный основной вал. Все-таки погнуло его немного.
- Одна серва автомата перекоса. Из-за неё случился краш.
- Рама. Погнулась так, что надо или очень сильно править, или менять.
- Хвостовая серва JR ds290G, надо менять шестеренки.
- Карбоновые лопасти, их поломало на несколько частей.
Запчастей у меня больше нет, пока засяду за симулятор. 😦
Вчера вечером решил отработать кувырки назад и вперед с новыми настройками мотора. Полеты сразу не задались, первый пак я случайно отлетал с половинными расходами в передатчике. Два раза чудом вытащил слабоуправляемый вертолет из крутого пике. Потом сообразил в чем дело, поменял пак и стал летать дальше. Во время очередного кувырка назад дал слишком много отрицательных шагов, вертолет вначале подбросило вверх, а потом кинуло на меня. А я выруливать в ситуации, когда вертолет прямо над головой, пока не умею. Всё, что я смог - это дернуть вовремя холд. Вертолет влетел в землю по касательной, почти параллельно поверхности, но с высокой горизонтальной скоростью.
Совсем недавно я поставил особо прочный основной вал, из закаленной стали. И результате краша вал не погнулся. Но остальное все поломалось.
В минусе:
- Карбоновые лопасти (поломало на две части)
- Хаб основного ротора (отломался кусок алюминия)
- Качалка одной сервы (поломало напрочь)
- Пара линков (погнуло или вырвало)
- Основная шестерня (один зуб съело, видимо не совсем вовремя холд дернул).
- Ось флайбара (погнуло).
Пока поставил пластиковую голову от HK450. Заказал на ebay металлическую голову в сборе за $33 с доставкой.
Сегодня облетаю новые настройки двигателя, никак не могу победить большой диапазон колебаний оборотов в режиме гувернера при высоком напряжении.
Я доигрался и сжёг новый моторчик Turnigy E500 6T 4000Kv
Пытался опытным путем подобрать значения частоты ШИМ и угол опережения. Поставил частоту в 25кГц, а угол опережения в 22 градуса.
При таких установках снял более 700 Вт при оборотах ротора 3000 в минуту.
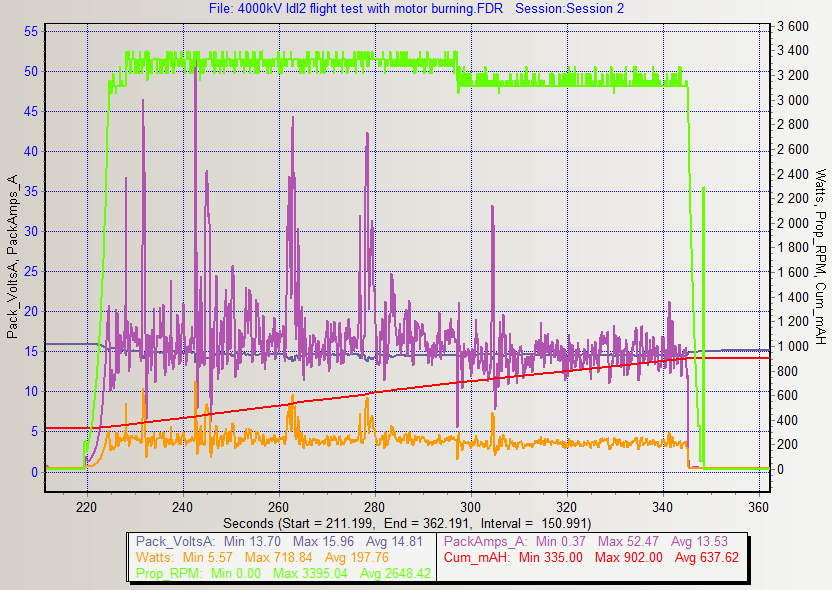
Ну а потом, при очередной раскрутке ротора, мотор сгорел. Выглядело это так:
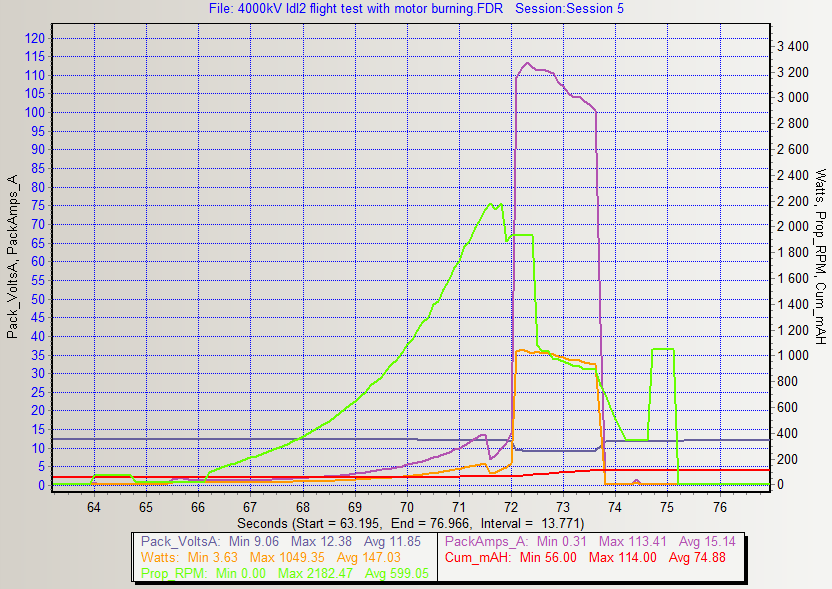
Надо отдать должное контроллеру Markus SL45, две секунды он выдерживал ток более 100 А, и не сгорел.
Обмотки мотора пахнут горелым, но внешне выглядят нормально. Что делать дальше с мотором, я не знаю.
UPD 14.07.2009
На самом деле не все так просто. Мотор не сгорел, я проверил его на другом контроллере. Работает отлично.
А вот с контроллером что-то не так, или мне кажется. Сегодня отлетал три батарейки 4S, все нормально. Поставил батарею 3S, появилась та же проблема, мотор не может раскрутится. Расстроился. Пришел домой и изменил параметр Start Power с 15-и до 30-и. Все заработало.
Что-то мне подсказывает, что параметры PWM frequency и Start Power связаны. Чем больше выставлена частота ШИМ, тем меньше надо ставить Start Power. И наоборот.
Буду дальше разбираться…
UPD вечер 14.07.2009
Только что вернулся с поля, где успешно отлетал пять аккумуляторов. Итак, “дело было не в бобине, раздолбай сидел в кабине”… Мотор Turnigy E500 6T 4000Kv и контроллер Markus SL45 полностью реабилитированы. Виноват человеческий фактор, т.е. я. 😃
Дело в том, что позавчера утром я припаял к выходам контроллера датчик оборотов для подключения к eLogger V3. И когда подключал разъемы к двигателю, не проверил качество соединения. А оказывается один разъем очень слабо держался. Вот и пропадал там контакт, двигатель не мог стартовать, “двоил”. В поле я обратил на это внимание, посмотрел разъем, а там внутри все черное, видимо от искр. Почистил все, слегка деформировал “маму” плоскогубцами и вставил “папу” внатяг. После этого все проблемы пропали. Мной же получена очередная порция опыта. 😃
Финальный апдейт
Проблема все-таки была в двигателе. После недолгих мучений он окончательно умер. Коротило обмотки. Регулятору респект за то, что он стойко выдержал такие испытания.
Вчера раздолбал свой вертолетик. Начал крутить флипы в сильный порывистый ветер, зарулился и уронил птичку прямо к ногам. Обидно, что не нажал hold вовремя.
В минусе основной и промежуточные валы, основная шестеренка, лопасти, ось флайбара. Стандартный набор.
Все уже починил, поставил с оказией мотор Turnigy E500 6T 4000Kv.

Отзывы очень противоречивые, на сайте указана мощность 200 Вт, в комментариях пишут об удивительной мощности. Я все проверю. Покрутил мотор дома на отрицательных шагах, при -10 градусах мощность достигает ~400 Вт. Провел сеанс полетной телеметрии.
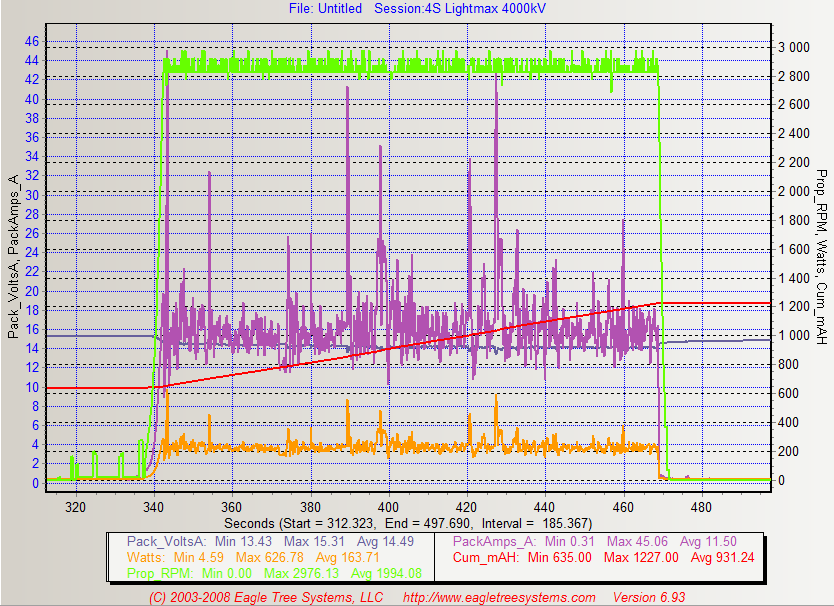
Видно, что в пиках мощность превышает отметку в 600 Вт. Если поднять обороты до 3000, то можно снять и больше мощности. Вертолет с батареей 4S и с комплектом телеметрии весит 930 грамм, но при это очень неслабо подрывает. Крутить флипы очень комфортно. С батерей 3S и без телеметрии должен быть еще резвее.
Эффективность этого мотора явно ниже, чем Turnigy 2836 Brushless EDF Motor 3200kv, даже в настроечных режимах происходит ощутимый нагрев корпуса. Мотор 3200kV даже после агрессивного питч-пампинга был слегка теплым.
Так же значительно выше сопротивление вращению на холостом ходу. Это, скорей всего, эффект от более сильных магнитов.
Заметил очень досадный конструктивный недостаток. Вал ротора никак не фиксируется, нет ни стопорной шайбы, ни винта. Разработчики предполагали, что пиньон должен упираться в корпус статора? Если так, то я очень удивлен. Мне пришлось установить латунную втулку между подшипником статора и пиньоном.
Сегодня успешно поднял свой HK450 на километровую высоту над уровнем моря. Для этого мне пришлось забраться на гору высотой 994 метра. 😃
Было страшно, но очень красиво!

Вчера вечером задумался, почему же у меня обороты при аккумуляторе 3S меньше, чем при 4S. Вроде как гувернер должен их держать независимо от батареи.
А потом включил Excel, посчитал все и понял, что я глупый синий ишак. 😛
Еще бы у меня обороты не падали!
Мне надо 2800 об/мин. на роторе. Основная шестерня 150 зубьев, пиньон на двигателе - 10 зубьев.
Для того, чтобы двигатель давал 42 тыс. об/мин., необходимо напряжение 13,125 Вольт, т.к. двигатель 3200 kV. Откуда же эти вольты у 3S? Вот мне и ответ.
Поставил пиньон на 11 зубъев, теперь необходимо держать 38 тыс оборотов в минуту, это уже более реально, напряжение должно быть 11,931 Вольта. Но всё равно не совсем правильно. Закажу пиньон на 12 зубьев, тогда необходимые 35 тыс. оборотов в минуту будут уже при 10,93 Вольта, т.е. приличный запас остается.
Вот как бывает полезно думать перед сном. 😃
В Осло приехал Андрей Прикупец, легенда FPV.
Я составил компанию Андрею во время некоторых его полетов.
Вот несколько фотографий и видео:












Было здорово!!!
Сегодня я наконец-то выкладываю видео как летает мой клон HK-450 на 15-и вольтах (4S LiPo). Мотор Turnigy 2836 Brushless EDF Motor 3200kv за 17 баксов. Дергать стик газа до упора вверх я пока побоялся, но и так вертолет подрывает неслабо. Теперь у меня нет технических проблем с вертолетом, все зависит только от меня. Буду тренироваться… 😃
Целью данной статьи является подробное описание полученных мною знаний при подготовке контроллера скорости Markus SL45 к эксплуатации. Я столкнулся с множеством вопросов, и уверен, что публикация ответов на них поможет новичкам, как я, сохранить время и силы. 😃
Почему Markus? Честно скажу, выбрал только потому, что при многих равных характеристиках, это российская разработка. Почитал форумы, вроде негативных отзывов нет. Еще и сына моего зовут Маркус. 😃
Для мотора Turnigy 2836 Brushless EDF Motor 3200kv, который стоит на моем вертолетике, крайне сложно найти развернутые характеристики. На китайском сайте указана максимальная мощность 650 Ватт. Даже если тут правды только наполовину, то все равно максимальный ток может достигать 35А при использовании аккумуляторов Li-Po 3S. Я выбрал номинальный ток контроллера скорости с запасом на будущее - 45А. Может когда-нибудь дорасту до 500-ки. 😃
Встала задача - купить контроллер. Как оказалась, это достаточно непросто. У половины московских интернет-магазинов контроллера не было на складе. Из оставшихся только три принимали VISA к оплате. Из этих трех только у одного была доставка за пределы России. Но вот цена доставки повергла в шок - 3600 рублей! 😵
Пришлось заказывать в Америке. На сайте gobrushless.com контроллер был в наличии, да и доставка стоила гуманные $14.14. Я сразу заказал USB адаптер для программирования с помощью компьютера. Всё вместе получилось $121, что не дешево, конечно, но терпимо.
Через неделю заказ пришел. К тому времени у меня уже начались непонятные проблемы со старым контроллером, поэтому откладывать установку Маркуса на вертолет я не стал.
С распайкой контактов проблем не было, плюс и минус силовых проводов перепутать сложно. Контроллер достаточно большой, но в раму моего клона влез без проблем.
Так как планировалось использовать аккумуляторы 4S, то сразу к силовым разъемам был припаян внешний BEC, а из сигнального провода контроллера убран центральный (красный провод).

По окончанию монтажных операций настала очередь программной настройки контроллера. Для этого необходимо:
- Скачать ПО с сайта производителя.
- Установить драйвер адаптера.
- Подключить адаптер к USB порту компьютера.
- Запустить программу MESC.
- Открыть окно настроек (иконка с гаечным ключом и молотком) и выбрать COM-порт с максимальным значением (у меня получился COM12).
- Подключить сигнальный провод контроллера к адаптеру.
- Подключить силовую батарею к контроллеру.
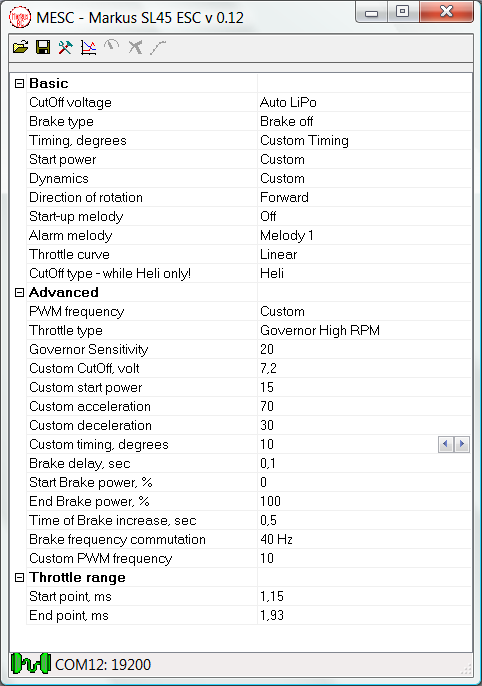
Программа считает текущие настройки контроллера и отобразит их в окне. У меня это выглядело так:
Далее началось самое сложное. Необходимо было правильно и с пониманием настроить параметры контроллера под тот мотор, который у меня имеется.
Я пройдусь по всем параметрам и постараюсь описать их значение. Частично информацию возьму из документации, частично из переписки с разработчиком, частично из иностранных форумов и статей.
На момент написания статьи версия прошивки имела номер 0.12. По мере обновления прошивок я буду дополнять/редактировать описание.
CutOff voltage - отсечка по напряжению питания:
- 5,0v 6-7 элементов NiCd/NiMh
- 6,0v 7-9 элементов NiCd/NiMh или 2 элемента LiPo
- 9,0v 10-12 элементов NiCd/NiMh или 3 элемента LiPo
- 12,0v 13-16 элементов NiCd/NiMh или 4 элемента LiPo
- 15,0v 5 элементов LiPo
- 18,0v 6 элементов LiPo
- выключено отсечка отключена
- “АutoLiPo” автоматическое определение батареи от 2 до 5 элементов LiPo
Я поставил AutoLiPo, так как использую аккумуляторы 3S и 4S. Если же аккумуляторы всегда одного типа, то более правильно будет установить значение отсечки вручную.
Brake type - тип тормоза. Для вертолетов надо всегда ставить Brake Off.
Timing, degrees - угол опережения электромагнитного поля, так называемое скольжение. Это очень важный параметр синхронного двигателя. Правильно подобранное значение скольжения выведет работу двигателя в оптимальный режим. Угол опережения зависит от количества полюсов магнитов в роторе двигателя. В документации рекомендации следующие:
- 3 град. для 2 полюсных моторов
- 7 град. для 2 полюсных моторов
- 12 град. для 2-4 полюсных моторов
- 17 град. для 4-10 полюсных моторов
- 22 град. для 6-14 полюсных моторов
- 27 град. для 10-14 полюсных моторов
В то же время на форуме www.helifreak.com рекомендуют использовать более низкие значения. Я поставил опережение в 23 градуса.
Так же угол опережения надо выставлять в зависимости от значения напряжения. Я заметил, что для достижения высокой точности поддержания оборотов необходимо при повышении напряжения так же немного увеличивать угол опережения. 23 градуса - это для батареи 4S. Для 3S можно поставить 18-20 градусов.
Для справки:
Принцип работы бесколлекторного двигателя, основан на том что контроллер скорости так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки статора и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор. Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например у двигателя с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора.
Start power – мощность старта. Я не совсем понял, на что это влияет в моем случае, а задумано это для того, чтобы регулировать величину потока, генерируемое обмотками статора при запуске двигателя. В моем случае значения от 1 до 50 ничего не меняют. Зависимость прямая, чем больше значение параметра, тем больше энергия старта.
Dynamics – вот этот параметр определяет скорость нарастания и уменьшения оборотов. Именно им можно добиться плавной раскрутки ротора. Необходимо установить параметр Custom и в разделе Advanced задать значения Custom Acceleration и Custom Deceleration. В моем случае плавная раскрутка ротора получилась при значении 70 для Custom Acceleration.
Важное замечание - значения Custom Acceleration и Custom Deceleration имеют обратную шкалу, то есть меньшее значение параметра задает бОльшую скорость увеличения или уменьшения оборотов.
При переходе в режим Hold (остановки) двигатель останавливается мгновенно независимо от настройки параметра Custom Deceleration.
Direction of rotation – тут все понятно, можно программно поменять направление вращения ротора двигателя. Мне повезло, я сразу удачно припаял клеммы с красной и черной термоусадками.
Start-up melody – отключил сразу, чтобы не пиликало не по делу.
Alarm melody – пусть привлекает внимание.
Throttle curve – кривая газа. Тут разработчик мне не сообщил, каковы значения экспонент А и Б. Он просто сказал, что в моем случае надо поставить линейную зависимость. Как я и сделал.
Cut-off type – тип отсечки при падении напряжения питания. Тут всего один вариант – “вертолетная”, т.е. плавное снижение оборотов.
PWM frequency – Частота ШИМ. Тут тоже все не просто. Это значение зависит от характеристик двигателя, а вот производители двигателей не всегда указывают необходимые параметры. Поэтому надо или искать аналоги, или подбирать значения опытным путем.
При меньших значениях параметра возникает очень широкий диапазон колебаний оборотов в режиме гувернера, до 10%, что неприемлемо. При бОльших значениях так же возникают колебания, двигатель сильно греется и перестает адекватно работать параметр Custom Acceleration. Правильно подобранная частота ШИМ позволяет очень точно поддерживать обороты двигателя и увеличивает КПД двигателя. К сожалению, без приборов телеметрии оптимально настроить частоту ШИМ очень сложно.
Так же рекомендую повышать частоту ШИМ при повышении питающего напряжения. Для батареи 4S я ставлю 22 кГц, для 3S - 10 кГц.
Throttle type – тип канала газа. Нас в этом пункте интересует прежде всего режим поддержания постоянных оборотов, или гувернера. Реализуется он достаточно хитро. Существуют два параметра: Governor High RPM и Governor Low RPM. Оба они задают скорость вращения электромагнитного поля в пределах значения канала газа от 20% до 80%. В этих режимах обороты двигателя не зависят от напряжения силовой батареи и от kV двигателя (важно, чтобы напряжение батареи не было ниже необходимого), преимущество 4S перед 3S будет проявляться только в бОльшей мощности потока на обмотках статора. Это очень удобно, так отпадает необходимость создания раздельных конфигураций для 4S и 3S в передатчике. Кривая газа для различного напряжения питания будет одинакова. Однако надо учитывать возможности батареи и kV двигателя. Контроллер не может поднять напряжение выше, чем выдает батарея. Если напряжения батареи будет недостаточно для заданных оборотов, то контроллер будет держать максимально возможные обороты для напряжения, получаемого от батареи.
Итак, по информации от разработчика в режиме Governer Low RPM обороты по полю составят от 14500 до 49000 об/мин, в режиме Governer High RPM - от 50000 до 175000 об/мин. Обороты на валу двигателя будут равны оборотам по полю деленным на количество пар полюсов двигателя (как правило - количество магнитов / 2). Зная количество пар полюсов магнитов в роторе, не сложно рассчитать необходимое значение канала газа для поддержания желаемых оборотов.
Я столкнулся с проблемой, как же узнать, сколько в двигателе пар полюсов. Посмотрел на него снизу – там только видны обмотки статора (двигатель outrunner, т.е. центральная часть неподвижна).
Потом до меня дошло, что магниты должны быть на стенках подвижного корпуса. И действительно, присмотревшись, я увидел шесть тонких пластин. Значит у меня три пары полюсов двигателя.
Далее все считается очень просто. Мне необходимо поддерживать 2800 об/мин на основном роторе. Стоит пиньон с 10-ю зубьями, основная шестеренка на 150 зубьев, получается, что обороты двигателя должны быть 2800*(150/10) = 42000 об/мин.
Тогда необходимое значение канала газа вычисляется по формуле:
Газ(%) = (обороты двигателя*(количество полюсов/2)-обороты гувернера при 20%)*(80-20)/(обороты гувернера при 80% - обороты гувернера при 20%) + 20.
В моем случае это x=(42000*(6/2)-50000)*(80-20)/(175000-50000)+20
Получаем х = 56,48%. Так как эффективность двигателя не бывает 100%, то я установил полку газа в значение 60%, на всякий случай.
Кривая газа в нормале получилась 0 60 60 60 60. Для режима IDLE1 я установил 3000 об/мин для основного ротора. Кривая газа получилась совсем прямой - 63 63 63 63 63. 😁
Прошу отметить, что мои настройки подразумевают использование батареи 4S. Поэтому рассчитывайте значение газа аккуратно, а не копируйте мои значения бездумно. Иначе контроллер будет работать неправильно, а вы расстроитесь. А я не хочу, чтобы вы расстраивались.
Governor sensivity – чувствительность говернера. Чем меньше число, тем быстрее реакция гувернера, но выше вероятность возникновения автоколебаний после резких перекладок. Чем выше напряжение питания, тем ниже должна быть чувствительность гувернера. Я поставил значение 30 для батареи 3S и 50 для 4S.
При изменении параметров контроллера запоминание происходит сразу, автоматически.
Обновление прошивки производится в программе MESC. Предварительно скачанную с сайта прошивку (файл с расширением upd) необходимо поместить в каталог управляющей программы. Затем после запуска программы и при подключенном контроллере (т.е. когда мы можем настраивать параметры) необходимо нажать <Ctrl+F> и выбрать необходимое обновление.
После обновления все настройки контроллера сбрасываются в значения по умолчанию.
Светодиодный индикатор на контроллере дублирует писки мотором при проигрывании мелодий и программировании с передатчика, загорается при длительности сервосигнала большей значения максимального газа и начинает помаргивать при отсечке. Помаргивание при отсечке заметить сложно, надо ставить более эффективные индикаторы разряда батареи. А вот оповещение о превышении максимального газа очень полезно. На практике это означает, что если напряжения батареи для поддержания заданных оборотов не хватает, то загорается светодиод. Хитрость в том, что работа гувернера не зависит от параметра kV двигателя, а только от количества пар полюсов магнитов. Если у меня, например, два двигателя, один 3200 kV, другой 4000 kV, то установки гувернера для обоих будут одинаковы (с учетом того, что пиньен на обоих двигателях стоит одинаковый). Но вот напряжение потребуется разное. Если мне необходимо 3000 об/мин на роторе, а пиньон у меня с 10-ю зубьями, то для двигателя 3200 kV необходимо 14 Вольт, а для двигателя 4000 kV - 11,25 Вольт. В первом случае батареи 3S не хватит - будет гореть светодиодный индикатор на контроллере, а обороты будут зависеть от текущего напряжения батареи (т.е. понижаться при разряде). Если поставить 4S, то все будет в порядке, пока напряжение не упадет ниже 14-и Вольт. Во втором случае гувернер будет уверенно держать необходимые обороты при использовании батареи 3S. Надо так же учитывать эффективность двигателя. После покупки телеметрии, я могу точно сказать, что при расчете значения газа для режима гувернера необходимо добавлять 5-10% к расчетному значению. У меня двигатели с более низким kV имеют более высокую эффективность. Конкретно Turnigy 2836 Brushless EDF Motor 3200kv требует поправки на 4% в плюс.
Подлет состоялся вечером. Был очень сильный ветер, порывами ломало ветки на деревьях. Думаю, что доходило до 20-25 м/с. Но висеть было хоть и страшно, но возможно. Ротор вращался с постоянной скоростью, провалов при резких подъемах не было. Заметил, что при равном времени полета, режим гувернера расходует больше энергии, чем полет по кривым. Хотя может дело в сильном ветре, надо проверять дальше.
Как я писал выше, настройки работают с аккумуляторами 3S и 4S без корректировок. При 4S стабильность оборотов выше, чем при 3S. Тут уже сказываются возможности аккумуляторов выдавать нужный ток.
В целом впечатление от работы контроллера очень положительное. Продукт качественный. Надо отметить быстрые и четкие ответы от разработчика. Это большой плюс.
Рекомендую этот контроллер для использования. 😃
Итак, я облетал вертолет с аккумулятором 4S и пиньоном на моторе на 10 зубьев. Испытываю щенячий восторг!
Наконец-то вертолет летает так же, как в симуляторе. Или даже лучше!
Висение теперь является тривиальной задачей, висит при шаге 1-2 градуса, можно вывесить его и не трогать стики совсем. Перестало уводить хвост в сторону. Реакции на команды четкие и предсказуемые. Порывы ветра почти никак не влияют из-за увеличившейся массы (взлетный вес 887 грамм). При резком добавлении коллективного шага просто выстреливает вверх. Даже страшно. 😃 Пока я поставил кривую газа так: 0 60 70 80 80. Больше ставить значения побоялся. И так чувствуется мощь…
А самое главное - я висел 12! минут, иногда проверяя гироскоп резкими подрывами. Дольше висеть не решился. И что вы думаете я увидел, когда зарядил батарею? Я глазам своим не поверил!

Всего 1419мА из 2200мА израсходовано за эти 12 минут. Получается, что висеть я мог бы минут 16-18, не меньше. Это огромный плюс для меня.
Может и правильно я не стал дальше летать, новые батареи не рекомендуют сразу сильно разряжать.
Одним словом - я очень доволен!
Для батарей 3S я создал отдельную модель в передатчике. Там настроил кривые газа, время таймера, чувствительность гироскопа. Даже на 3S вертолет стал намного лучше управляться благодаря пиньону c 10-и зубьями. Время полета не изменилось, так же примерно 7-8 минут. Но с 4S, конечно, не сравнить…
Пишу это прежде всего для себя, потом мне уже всех деталей не вспомнить. Ну и, может, читателям дневника будет интересно. 😃
Итак, все началось 20-го марта 2009 года. Выбирая очередную игрушку для сына в торговом центре, я наткнулся на радиоуправляемую модельку вертолета. Внимание привлекла 50% скидка. Не долго думая, я купил игрушку и себе, а сыну большой экскаватор.
Вертолет купил просто из любопытства, никогда у меня не было страсти к вертолётам, не было и заветной мечты в детстве.

Полетал в комнате, понял, что опасно. Полетал в парке, понял, что летать надо только в полный штиль. Очередной порыв ветра бросил вертолётик на пешеходную дорожку.
Собирал я его уже по частям, в радиусе пяти метров. Ничего не потерял, всё нашлось. 😃
Попытался починить, на удивление всё получилось. Суперклей и липкая лента сделали своё дело!
Мне понравились ощущения при управлении вертолетиком и я решил двигаться дальше. Первым делом я стал рыться в интернете в поисках необходимой информации. Зарегистрировался на этом форуме. Прочитал, как можно улучшить купленную мной игрушку.
Все мои действия с игрушкой Nikko я описал в теме “Как лучше стать новичком (от игрушки Nikko до нормальной модели)”. Эта переделка дала мне неоценимый опыт. Методом проб и ошибок я постепенно понимал, к чему надо стремиться и на что я способен. Первоначальное желание купить T-Rex 600 ESP сразу пропало, начался длительный поиск информации по рынку моделей вертолетов.
Зная, что первые полеты обязательно будут сопровождать падения и поломки, я заказал максимально дешевую летающую модель. В итоге заказал два комплекта HK450. Всего 36 долларов США за комплект.

Собирал я его три дня, почти что без перерыва. Когда я не собирал его руками, я собирал его в уме. Купил огромное количество инструментов.
Час Икс настал в пятницу вечером 24 апреля. Дрожащими руками я подключал разъем питания, готовый немедленно потерять нового друга, за три дня ставшим почти родным. Пальцы на пульте управления мгновенно взмокли при звуках разгоняющегося основного ротора. Отступать некуда, надо взлетать…
Скажу честно, давно я не испытывал такого прилива адреналина. Не помню, когда меня охватывал такой ребячий восторг. Я бы абсолютно счастлив, когда вертолетик оторвался от свежей травки и завис в полуметре от земли, покачиваясь. От переизбытка чувств я достаточно жестко плюхнул модель на землю. Получилось! Руки дрожали, ноги подгибались. Желание продолжить полеты боролось со страхом разбить вертолетик. Разум победил, и я собрал все в машину и поехал домой.
А вот на следующее утро состоялся настоящий облет вертолетика, или как говорят моделисты — «подлет». Я уверенно висел уже по несколько минут, отвисел два аккумулятора. Со стороны, говорят, был очень серьезный, но в душе я сиял, как пятилетний ребенок.

Первый краш состоялся через несколько дней. Это немного убавило эйфорию, но добавило разума. Стало приходить понимание, что и как работает. Параллельно я регулярно тренировал навыки в симуляторе. В какой-то момент висение хвостом к себе, даже в ветер, стало тривиальной задачей. Это важная ступенька для меня, хотя бы в одном положении, но я начал чувствовать вертолет. Сейчас я уверенно летаю в симуляторе, и по кругу, и восьмерки, и перевороты. В реале пока страшно, да и уже четыре краша пережил, а сколько еще впереди!
Теперь насчет финансовой стороны моего хобби. Как ни стараются китайцы выпускать свои клоны по смешным ценам, всё равно трат не избежать. Мой опыт подсказывает, что я истратил не меньше, чем стоит новенький T-Rex 450 SE V2, а может даже и больше. Вот только вместе с этими затратами я приобрел дополнительные знания и навыки, которые при покупке оригинального Т-Рекса у меня появились бы значительно позже (и за бОльшие деньги). Так что смысл в клонах всё-таки есть.
Итак, что у меня было в самом начале.
Это был стоковый HK450 в следующей конфигурации:
- Мотор Turnigy 2836 Brushless EDF Motor 3200kv = $17.57
- Лопасти 325mm Carbon Fiber Main Blade = $14.22
- TURNIGY Plush 30amp Speed Controller = $19.46
- Гироскоп Assan GA-410 = $49.95
- Аккумуляторы 2x ZIPPY-R 2300mAh 20C 3S1P variations = $35.98
- Сервы на механизм перекоса 3x GWS Naro Super 19g/3.6kg /.07sec Digital Servo = $72.42 (Для них пришлось увеличивать отверстия в раме)
- Серва гироскопа MKS DS480 Digital Servo 1.85kg/.068sec /10.9g = $24.60
С учетом того, что я заказал еще второй комплект на запчасти, заказал инструменты и клей, передатчик/приемник и симулятор, зарядник и т.д., то перед первым полетом мне пришлось истратить:
Вертолет + оборудование к нему + зарядник Turnigy Accucel-8 + запасной кит + доставка: $619.25
Передатчик Futaba 7C + два приемника 617 + доставка и растаможка: $441.25
Симулятор FS1 + пульт Spektrum DX5e для тренировок: $216
В итоге получается $1276.5. Что согласитесь, немало. И это без учета инструмента, который я купил под этот проект, там еще минимум долларов на триста (один дремель стоил 740 крон, это больше 100 долларов).
Так что сэкономить не получилось. 😃
В итоге у меня получился вот такой вертолет:
Все стандартное, гироскоп сверху на площадке, тяжелая батарейка и мини (не микро!) сервы.
Вертолет поднимался в воздух, но управлять им было крайне сложно, любое изменение шага просаживало двигатель, вертолет падал вниз. Именно из-за этого у меня случился третий краш. Так же в пластиковой голове появилась неустранимая бабочка, оказалось, что появился большой люфт. Я заказал металлические голову ($48.94) и хвост ($23.94) от Tarot на cy-models.com. После установки бабочка пропала.
Так же поставил карбоновые детали на хвост и на балку, т.к. штатная пластиковая деталь очень сильно гнулась и не защищала хвост.
Но вертолет как летал неважно, так и продолжал. Взлетный вес составлял 828 грамм.
Было решено перейти на повышенное напряжение. 😃
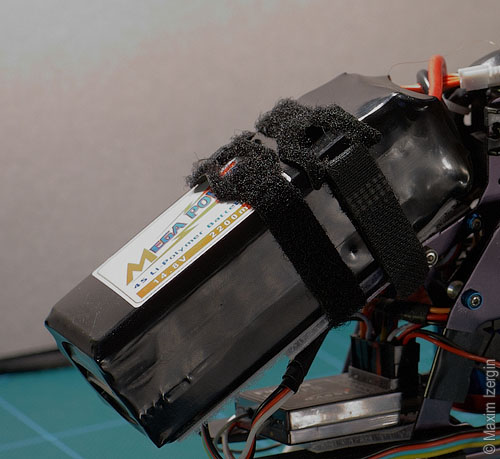
Была куплена “правильная” батарея 4S MEGA POWER Li-Po Battery 2200mAH 18C 14.8V V2 ($50.90) и шестеренка на 10 зубьев.
Для работы ESC с батареей 4S необходим уже внешний BEC, т.к. линейный BEC в контроллере скорости не потянет 4 цифровые сервы при напряжении 14 вольт, слишком значительно надо уменьшать напряжение питания (с 14 до 6 вольт) и разницу придется рассеивать на резисторе. Это лишние потери энергии и значительный нагрев регулятора. Поэтому я приобрел 3A 5V/6V Switch-Mode UBEC (UBEC56) ($13.95). Дешево и сердито.
Когда все перепаял и настроил, получился вот такой красавец:
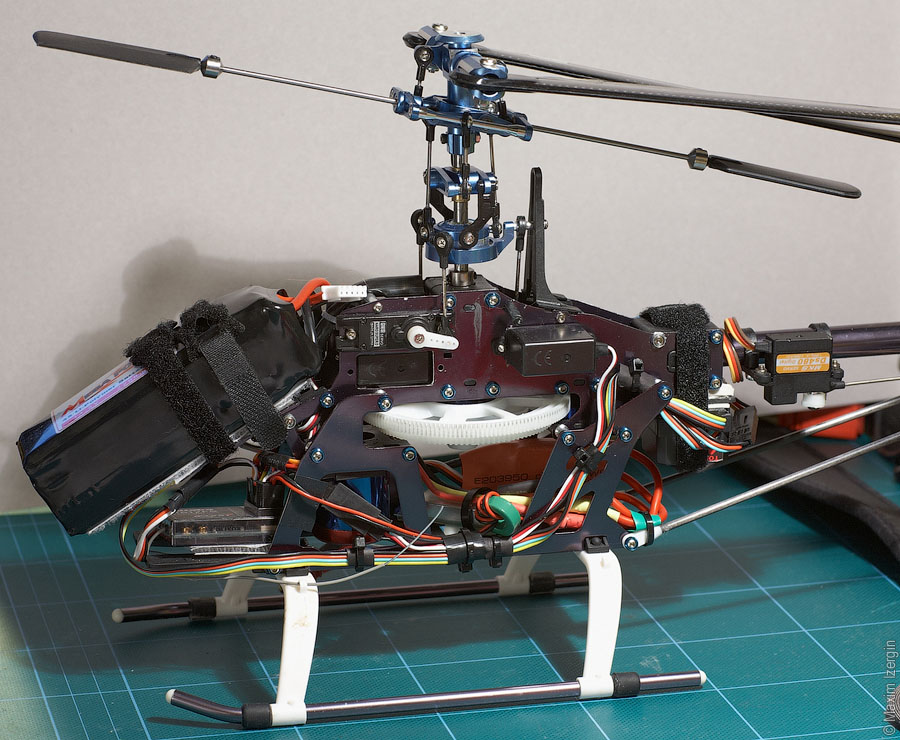
Гироскоп переместился под балку, во избежание попадания по нему флайбаром при краше.
Здесь, помимо всего перечисленного, стоят алайновская оригинальная основная шестеренка, алайновский основной вал и алайновский хаб хвостового ротора. От HK450 осталось только рама, шасси и хвостовая балка. Даже винтики у меня стоят алайновские. 😃
На этой фотографии хорошо видно крепление серв, регулятора, внешнего BEC и укладку проводов. Т.к. внешний BEC импульсный, то на провод, идущий к приемнику, установлено ферритовое кольцо для защиты от высокочастотных помех.
К сожалению, облетать вертолет с новой батареей и пиньоном на 10 зубьев пока не получилось, на улице дождь. Но тесты в комнате показали, что электроника работает нормально, ротор очень уверенно раскручивается. Прогнозы благоприятные. 😃
Завтра обязательно облетаю моего HK_Align_Tarot-450… 😃
Позавчера пытался висеть носом к себе. Первый раз получилось, провисел минуту, хотя колбасило сильно. Навыков мало.
Второй раз попробовал повернуться, вроде все нормально было, а потом понесло модель в небеса. Зрение у меня неважное, поэтому я быстро потерял детали вертолетика из вида, видел только размытую точку.
Ориентировался по звуку (рядом стоял Серега “AlkoNaft43”, у него были очки, он все видел и мне говорил).
Почти вырулил вертолет, несмотря на немыслимые для меня пируэты. Но мерта в 50-и от меня, на высоте около 10-и метров я не смог облететь березу. И задел верхнюю часть кроны.
Вертолетик со всей дури упал на землю, а тренировочные шасси так и остались на ветвях.
Видео нет, в тот день забыл камеру дома. 😦
Повреждений на удивление мало: только межлопастной вал и винт крепления головы на основном валу. Винт разрезало на 3 части. Основной вал не погнулся, т.к. я поставил улучшеный Align. Это радует.
Еще погнулась алюминевая рама, я все разобрал и выправил.
Вертолетик к полетам готов.
Я заказал новую батарейку 4S. Буду пробовать с текущим мотором 3200kV. Сейчас у меня строит пиньон на 13 зубьев, обороты вроде нормальные, но летать невозможно даже блинчиком (а я по-другому и не умею пока), слишком сильные просадки при изменении шага.
К батарее заказал отдельный BEC и пиньон на 10 зубьев. Обороты сохранятся на уровне 2800 в секунду. (при 90% эффективности), а вот момент прибавится. По результатам отпишу. 😃
У меня теперь каждый подлет оканчивается крашем. Я принимаю это спокойно, ошибок не допускает только тот, кто ничего не делает.
Сегодня было ветрено. Особенно в Ekeberg, где я обычно летаю, т.к. поле находится на высоком холме. Порывистый ветер до 10 м/с ощутимо трепал волосы на голове. Но это не повод для отказа от тренировок. 😃
Первый аккумулятор я отлетал без поломок, но экстремально (для меня). Адреналина получил литр, не меньше. 😃
Вот второй подлет на первом аккумуляторе.
Выкладываю еще один подлет, вроде четвертый на первом аккумуляторе.
Потом я немного отошел от впечатлений и прицепил второй аккумулятор. И первый же подлет окончился неудачей. При порыве ветра я слишком сильно убрал газ, пытаясь сохранить высоту, а когда порыв кончился, то добавить оборотов не успел. Ну и плюхнулся в траву.
В минусе:
- межлопастной вал,
- основной вал,
- главная шестеренка (10 зубъев съело)
- вал хвостового ротора.
Заменил и настроил всё очень быстро, вертолетик стоит на шкафу и ждет новых полетов. 😃
Сегодня совершил очередной подлет. Сначала стабильно отвисел один аккумулятор, потом прицепил второй. Только оторвался от земли, как мне показалось, что ветер слишком сильный и решил скорее посадить модель. Как и в первый краш, спешка меня сгубила. На этот раз я приложил вертолет хвостом об землю, в минусе вал хвостового ротора и одна лопасть. Может еще что-то, я пока не разбирал и не чинил вертолет. До сих пор в недоумении, как так из-за малейшей неточности получаются такие повреждения. 😦
Я решил все свои подлеты записывать на видео. Чтобы при возможном краше внимательно оценить свои ошибки.
Сейчас выкладываю третью попытку повисеть. Краша не было, но сорвалось крепление шестеренки привода ремня хвостового ротора.