А какая разница движется он или висит? Если настроено все правильно, потеря связи должна приводить к включению режима ФС.
Это достигается либо включением ФС принудительно тумблером на аппе, либо при обрыве связи между аппой и приемником.
Если не поддерживает можно попытаться пришпандорить что то типа этого.
Или купить готовый, сам не пробовал но думаю должно работать.
если приёмник поддерживает FS
А если не поддерживает? Значит ФС не работает?
А как же у людей летает и работает на Турнигу 6 или том же Радиолинк АТ-9?
типичные осциляции
однозначно, гейны перекручены
нужно уменьшить
Точно, гейны…
Очень сильно были перекручены. Убрал до исчезновения колебаний, но при этом квадр стал очень лениво компенсировать отклонения… Золотой середины пока не нашел.
Подскажите, пожалуйста. Проблема с квадриком на NAZA: после взлета непрекращающиеся колебания по крену с частотой примерно 3-5 Гц. При этом квадрокоптер управляемый, по курсу и тангажу колебаний нет.
NAZA M LITE перешитая на V2. Это мой первый опыт с Наза…
Была к меня похожая проблема, когда на мелком квадрике стояла Наза. Рама былы самопальная и через чур мягкая. Гейны уменьшал до 70, осциляции уходили, но квадрик становился вялой коровой.
Переставил на карбоновый ZMR осциляции пропали, Гейны поднимал до 100.
Но все равно плохо Наза летит на мелких квадриках, ощутил это когда поставил и настроил нормальный мелкий мозг.
Точно, гейны…
Очень сильно были перекручены. Убрал до исчезновения колебаний, но при этом квадр стал очень лениво компенсировать отклонения… Золотой середины пока не нашел.
Гейны есть разные, одни отвечают за усилие удержания (стабильность удержания), а другие Аttitude - за скорость реакции на стики. Первые и вторые нужно настраивать отдельно.
Вопрос такой (Приобрел назу м лайт) до этого летел на мультивии остались моторы и ESC
1 Нужно ли перепрограммировать ESC при старых моторах?
2 Когда новые моторы куплю нужно ли опять программировать?
Вопрос такой
Регуляторы калибруются при смене аппы, моторы и прочее по барабану… Но можно и перекалибровать, делов то.
Главное аппу в назовском ассистенте откалибровать.
регуляторы калибруются при подключении к приемнику напрямую
им по барабану какой у тебя FC
Коллеги, добрый день! Обкатываю свой новый f450 (наза лайт перешитая в v2), вроде все гейны настроил: в точке висит, не дрейфует, не колбасит, при полете высоту не теряет. Однако при вращении вокруг своей оси квадр начинает унитазить. Направление унитазинга совпадает с направлением вращения, унитазит одинаково в обе стороны. Положение gps в назе выставлено вроде верно, gps - оригинал dji от v2, установлен на штанге длиной сантиметров 15.
Видел, что некоторые отписывались о данной проблеме, но решения не нашел.
Добрый день!
Столкнулся с такой ситуацией, при взлете в мануале коптер заваливает на левый бок и переворачивается не успев взлететь. В атти и в гпс подобного нет. В мануале не летаю и так то оно не особо критично, но как бы этот косяк где в другом месте не вылез. Регули калиброваны, коптер уравновешен центр тяжести в центре рамы, наза шитая. В ассистенте аппа калибровалась.
Доброе время суток всем!!!Всех с Днем победы!!!есть такая проблемма…
заранее всем спасибо
контроллер naza lite перепрошитая в v2
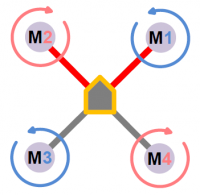
Проверьте расположение моторов и подключение Esc к назе.
все как нужно.
есть такая проблемма…
Гейны увеличьте…
а что там с гейнами?
еще как вариант: недогруженный квадр
все как нужно.
Полетный режим?
Взлетный вес?
Калибровки?
Гейны?
Проверьте расположение моторов и подключение Esc к назе.
Если в других режимах этого нет, то точно не ваш вариант. Проверено! =)
С праздником Победы Всех!
Если в других режимах этого нет, то точно не ваш вариант
Ну так то да) добавлю: гейны стоковые, вес 2200, аккум 8А
В других режимах летает относительно нормально (по крайней мере стабильность можно теми же гейнами подправить).
Если в других режимах этого нет, то точно не ваш вариант.
Вроде не писал про режимы, или я пропустил?
Ну так то да
В каком режиме проблема?
В каком режиме проблема?
вот
Столкнулся с такой ситуацией, при взлете в мануале коптер заваливает на левый бок и переворачивается не успев взлететь. В атти и в гпс подобного нет.