Полетные контроллеры Matek Systems

Где я ошибся?
может нужно в командной строке чего-нибудь про LED написать, уматека, если не ошибаюсь адресные диоды… включить в конфигураци LEDstrip…
На сайте производителя довольно развернуто все написано по подключению и настройке но что-то не вижу Вашего девайса там… www.mateksys.com/?page_id=2980
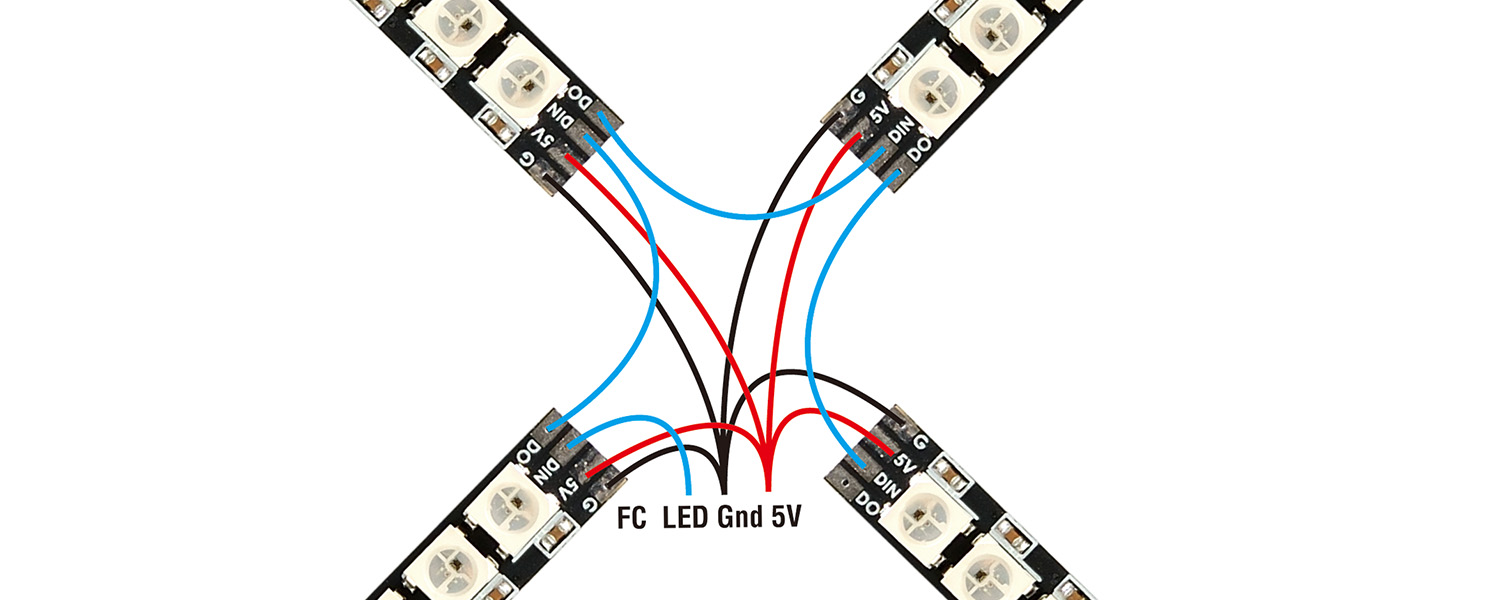
Подключать лед к матеку гимор, попробуй выход лед поменять адрес на 5й мотор. Я так и не смог запустить лед в БФ.
может нужно в командной строке чего-нибудь про LED написать, уматека, если не ошибаюсь адресные диоды… включить в конфигураци LEDstrip…
На сайте производителя довольно развернуто все написано по подключению и настройке но что-то не вижу Вашего девайса там… www.mateksys.com/?page_id=2980
Да, конкретно такого нет, возможно, поделка дядюшки Ляо. Но есть похожая плата, подключение как у меня:
Подключать лед к матеку гимор, попробуй выход лед поменять адрес на 5й мотор. Я так и не смог запустить лед в БФ.
Да, спасибо, на S5 всё сразу заработало. Моя ошибка, плохо читал мануал: для BF выход LED, а для INAV - S5.
Всем привет! Приобрел передатчик matek www.mateksys.com/?portfolio=vtx-hv#tab-id-4 в паре с F405-CTR
Первое с чем лопухнулся - ни в камере Predator v4, ни в передатчике этом нет микрофона, соответственно и звука нет (
вторая засада - подключил все по схеме www.mateksys.com/?portfolio=f405-ctr#tab-id-3, и камеру в BF 4.1.3 в командной строке прописал, но так и не понял как она стиками управляется … может кто подскажет
Третье - через LUA Script протокол IRC tramp переключить режимы VTX удается только между 25 и 200 мВт, на 500 никак?
в BF настроил таблицу, указал что 3 ступени мощности, метки ступеням поставил 1,2,3, но при установке на 500 мВт(метка 3) приемник переходит в режим 25 мВт, причем светодиод моргает и периодически картинка сбрасывается… Возможно как-то неадекватно работает ЛУА, потому что в нем можно выбирать между режимаими 25,100,200,400,600, ну и PitMode хотя приемник поддерживает 25,200,500 в режиме SmartAudio LUA предлагает режимы 25,200,600 но это пробывал с другим передатчиком от камеры Cadx… он вообще не переключался…
Кстати, разьем MMCX на передатчике греется, рука чуть терпит, так должно быть? вставлен до конца, антенка Лолипуп 3 stubby на родном переходнике. Может он и мощность из-за этого сбрасывает на 25 вместо 500, но при подаче команды ни с BF ни с Тараниса даже светодиодом не моргнет, который указывает режим 500мВт
Как вариант метки ступеням не правильно поставлены, в каких то передатчиках ставятся совершенно другие значения. т.е надо указать количество режимов, сигнал в передатчик для включения каждого из режимов (скорей всего это вы назвали метками) и что показывается в OSD. Как то так. Нужно читать как настраивать VTX в BF4.1.3 именно для этого передатчика ( в описании БФ должны быть ссылки на примеры настройки)
Тут смотрим с 55 минуты
тут читаем и берем github.com/betaflight/betaflight/wiki/VTX-tables
Нужно читать как настраивать VTX в BF4.1.3
Спасибо за посказку, буду пробовать так:
Setting up VTX Tables
If you are using a VTX that supports the SmartAudio or Tramp protocols then bands and channels etc. are managed using vtx tables since firmware version 4.1.0. The betaflight configurator will allow you to save your configuration to a craftname.lua file. Place this into the BF\VTX folder on the root of the SD card and rename it to match the model you use on your transmitter for this craft. The lua scrips will then use this information on the VTX configuration screen instead of the defaults.
Настройка таблиц VTX
Если вы используете VTX, который поддерживает протоколы SmartAudio или Tramp, то полосы и каналы и т. Д. Управляются с помощью таблиц vtx, начиная с версии встроенного ПО 4.1.0. Конфигуратор betaflight позволит вам сохранить вашу конфигурацию в файле craftname .lua. Поместите это в папку BF \ VTX в корне SD-карты и переименуйте в соответствии с моделью, которую вы используете на своем передатчике для этого ремесла. Затем lua scrips будет использовать эту информацию на экране конфигурации VTX вместо значений по умолчанию.
Вот ссылка на оригинал github.com/betaflight/betaflight-tx-lua-scripts
В общем помогло видео по ссылке Владимира, еще раз спасибо и настройки с сайта производителя, но с LUA 1.4.1 режимы передатчика 25,200,500 отображает соответственно 25,100,200. С мощностью разобрался, осталось чтобы каналы переключались и Камера контрол работало, но для камеры резистор нужно подбирать и, возможно конденсатор… github.com/…/FPV-Camera-Control-(Joystick-Emulatio…)
Пдскажите кто знает, какой стороной “вперед” Ставить этот gps чтобы компас работал адекватно?
photos.app.goo.gl/PFiyXNGTD86EuvQw9
Это BN 880 на двух платах

чтобы компас работал адекватно?
А вы точно уверены, что в этом модуле есть компас? В описании, что-то я не вижу.
Пдскажите кто знает, какой стороной “вперед” Ставить этот gps чтобы компас работал адекватно?
photos.app.goo.gl/PFiyXNGTD86EuvQw9
Это BN 880 на двух платах
Смотрите
Компас заработал после включения в айнавской программе. Просто на нем стрелки нигде нет. По рисунку вижу что должен стоять проводами низад. По моему рисунку перёд где цифра 3
photos.app.goo.gl/PFiyXNGTD86EuvQw9
Вообще неважно. Компас можно поставить любой стороной. В конфигураторе для компаса 8 позиций, вам нужно сделать максимум 8 попыток, чтобы найти правильную. Это делается быстрее, чем вопросы на форумах, поиск информации по компасу и т.п., и кроме того исключает вероятность установки по неправильно указанной маркировке.
Вообще неважно. Компас можно поставить любой стороной.
Хотел об этом написать, но уже опередили. Наглядным примером может служить известный модуль TS100. Тоже есть стрелочка, однако в настройках приходится устанавливать переворот и 270 градусов.
Хорошо бы отснять такой учебный ролик. Лучше раз увидеть как это делается, чем представлять это по своему
Для Inav для BN-880 в настройках нужно выставить MAG Alignment to CW270FLIP
Хорошо бы отснять такой учебный ролик.
На скорую руку отснял ролик. Через пол часика отмонтирую и выложу.
Для Inav для BN-880 в настройках нужно выставить MAG Alignment to CW270FLIP
Я делаю под ардукоптер. В айнаве я только проверил работает или нет. И не зря проверил. Первый оказался без компаса сосвсем. Вот бы я на настройки ардукоптера грешил бы и рылся бы там.
Выкладываю ролик как обещал. Коряво конечно, но для первого раза сойдет.
Понятно. Конечно это поможет. Я так понял что 270 - это азимут и его можно подогнать если компас даже стоит не той стороной. А проверить прямо по конфигуратору чтобы направление СЕВЕР совпадало в конфигкраторе и реально. Единственнвй вопрос осталься: если здесь в айнаве я введу подстройки, то в в ардупилоте этих настроек уже не останется? Они же вроде как не в компас ложатся, а в авторилот, который будет перешит. А в ардупилоте можно будет сделать тоже самое.
если здесь в айнаве я введу подстройки, то в в ардупилоте этих настроек уже не останется?
Не останется. Настройки идут на полетник. С ардупилотом не знаком, но думаю алгоритм такой же.