Такой вопрос. Есть ли смысл телеметрию 3DR и прочая цеплять на порт но не по 57 по умолчанию, а на 115200? и на борту и на земле?
акой вопрос. Есть ли смысл телеметрию 3DR и прочая цеплять на порт но не по 57 по умолчанию, а на 115200? и на борту и на земле?
смысла нет, air data rate все равно меньше, при увеличении air data rate падает дистанция связи
Вообще рекомендуют 9600 для дальности метров 500. Летом проверю.
Понятно спасибо.
Вообще рекомендуют 9600 для дальности метров 500. Летом проверю.
для модемов 3др 100мвт
на стандартных китайских антеннах 500м и так должно.
на хороших настроенных антеннах типа “сосиска” 1000-1200м
если на земле хорошая патч антенна а на борту настроенная “сосиска” то при наличии прямой видимости до 13км держит связь без изменения стоковых настроек.
для модемов 3др 100мвт на стандартных китайских антеннах 500м и так должно.
У меня на 100 мвт хоббикинговских клонах 3DR с их родными антеннами на 57200 пробивало до 3 км, естественно, потери были велики.
на 57200 пробивало до 3 км
может 57600 ? Это скорость проводных интерфейсов.
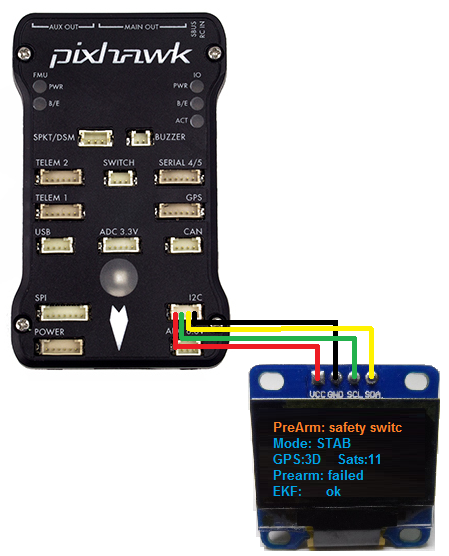
ardupilot.org/…/common-display-onboard.html
под 32 битные контроллеры самоль, коптер, ровер
работа нашей российской команды
Программирование Дмитрий Прохоров и я.
Идеи: наши форумяне - пользователи контроллера f4by (изначально прошивку мы сделали под свой контроллер)
под 32 битные контроллеры
С другой стороны, добавив туда атмегу, можно было через UART кучи информации выудить через MAVLink. И подошло бы к куче автопилотов. Ну и настройку отображаемых параметров как в MinimOSD сделать 😃 И тогда ее можно было и на земле использовать и на самолете.
Если так все круто, то дальность модемов больше дальности управления и видеолинка.
может 57600 ?
Да, конечно. ОписАлся! 😃
С другой стороны, добавив туда атмегу, можно было через UART кучи информации выудить через MAVLink. И подошло бы к куче автопилотов. Ну и настройку отображаемых параметров как в MinimOSD сделать И тогда ее можно было и на земле использовать и на самолете.
Гораздо круче было бы выводить всю эту информацию на ОСД. Добавить там страницу и туда это вывести. Тогда никакие дисплеи не нужны, хотя я и сейчас не понимаю зачем они нужны.
Нужно найтгостю подсказать, может он сделает, если в Мавлинке есть вся эта информация, конечно.
то дальность модемов больше дальности управления и видеолинка.
Каких модемов… какого линка… фиг поймешь.
День добрый.
Подскажите, можно ли организовать автовзлет на APM без компаса и GPS?
Типа как в INAV, бросил и самолет сам набирает заданную высоту, а дальше или в круг, или ждет команду от пилота.
Спасибо
Подскажите, можно ли организовать автовзлет на APM без компаса и GPS?
Нельзя
А если в режиме FBWA чуть-чуть подтримировать(подмикшировать) PITCH на себя.
Бросил, газ руками дал, PITCH и ROLL не трогаем, то в теории должен просто взлетать просто в ту сторону?
Компаса и GPS по прежнему нет.
Спасибо
Я так и взлетаю. Если ветерок или правильно бросил аппу не трогаю. Только сначала газ, потом бросил.
Подскажите, можно ли организовать автовзлет на APM без компаса и GPS?
режим авто и его субрежим takeoff не включатся без жпс лока
Сам по себе режим фбва подразумевает, что при скорости выше круизной самолёт будет набирать высоту.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"41f627693df9550077792609":{"_id":"41f627693df9550077792609","hid":5808,"name":"Glinco","nick":"Glinco","avatar_id":null,"css":""},"466d36bc3df9550077783d06":{"_id":"466d36bc3df9550077783d06","hid":23747,"name":"ehduarg","nick":"ehduarg","avatar_id":null,"css":""},"49f208733df955007776edb4":{"_id":"49f208733df955007776edb4","hid":47334,"name":"Slider235","nick":"Slider235","avatar_id":null,"css":""},"4c0957443df9550077760211":{"_id":"4c0957443df9550077760211","hid":67065,"name":"Shuricus","nick":"Shuricus","avatar_id":null,"css":""},"4e71d4e23df955007774e5d8":{"_id":"4e71d4e23df955007774e5d8","hid":99365,"name":"alexeykozin","nick":"alexeykozin","avatar_id":null,"css":""},"4eceb6233df955007774ba6e":{"_id":"4eceb6233df955007774ba6e","hid":106543,"name":"Karbafos","nick":"Karbafos","avatar_id":null,"css":"user__m-banned"},"4f2917ff3df9550077748c76":{"_id":"4f2917ff3df9550077748c76","hid":112336,"name":"Zippelin","nick":"Zippelin","avatar_id":null,"css":""},"50a523123df955007773dae5":{"_id":"50a523123df955007773dae5","hid":129106,"name":"Alex135","nick":"Alex135","avatar_id":null,"css":"user__m-banned"},"51e9514d3df955007773454c":{"_id":"51e9514d3df955007773454c","hid":164714,"name":"X3_Shim","nick":"X3_Shim","avatar_id":null,"css":""},"552d07dc3df955007771e6c6":{"_id":"552d07dc3df955007771e6c6","hid":222013,"name":"khomyakk","nick":"khomyakk","avatar_id":null,"css":""},"569e77bd3df9550077715029":{"_id":"569e77bd3df9550077715029","hid":244119,"name":"GreenLord","nick":"GreenLord","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb5186","hid":90,"title":"Полёты по камере, телеметрия","parent":"61c9a54c3df9550077bb50fc","description":"Бортовые видеокамеры, передатчики видео, видеоочки, обсуждение полётов по камере.","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":3154,"post_count":433372,"last_post":"691cf63feede43b1c4f9900b","last_topic":"635e349add64ea9bf5338593","last_topic_hid":571586,"last_topic_title":"Выбор цифровой FPV","last_ts":"2025-11-18T22:42:07.190Z","last_user":"5469d13d3df9550077723996"}},"topic":{"_id":"49a92dab3df95500779ea21f","hid":132831,"title":"Автопилот Arduplane - открытое ПО","views_count":1357961,"last_post_counter":17455,"cache":{"post_count":17300,"first_post":"49a92dab3df95500779eaf1b","first_ts":"2009-02-28T12:27:23.000Z","first_user":"3ea929d03df955007779662a","last_post":"66d052ee6371a12da9fb1647","last_post_hid":17455,"last_ts":"2024-08-29T10:52:30.369Z","last_user":"528900583df955007772fba7"},"st":1,"section":"61c9a54c3df9550077bb5186"},"subscription":null,"pagination":{"total":17300,"per_page":25,"chunk_offset":12707},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}