Автопилот Arduplane - открытое ПО

При чём здесь Pixhawk4, всё настраивается в Mission Planner.
Меня сегодня огорошили информацией, что в Pixhawk4 нет автовзлёта и автоматической парашютной посадки 😦 Изначально глядел в сторону этого автопилота из-за утверждения знатоков, что система позволяет почти всё что угодно и очень гибко настраивается под пользователя.
Непонятно как то это. АПМ может в автовзлет, а пикс 4й нет? неверится читой то.
Ну возьмите куб или V3x или V5 от CUAV. Да тот же 2.4.7(8) вполне себе машинка, единственно замечены заморочки при отрицательных температурах.
Сходите на оф сайт там в разделе по платформам всё есть. ardupilot.org/plane/docs/common-autopilots.html
…настраивается в Mission Planner… С вашего позволения. В мишине то оно поддерживается , но при наличии функционала в прошивке самого АП. Между арду на меге и пиксоподобных на стм уже разница ощутима по функционалу и входам выходам(шинам).
Меня сегодня огорошили информацией, что в Pixhawk4
А вы не верьте всяким бабкам на завалинке, а посмотрите - есть ли для него прошивка 4.х.х. Автовзлёт и прочие парашюты - не от полётника, а от его прошивки зависит 😁
Прошивка, конечно же, есть - значит и весь функционал есть: firmware.ardupilot.org/Plane/…/Pixhawk4/
Вообще было бы очень странно, если бы полётник на связке из F765+F100 умел бы меньше, чем “копеечный” полётник на F405 на той же прошивке. 😆
Да, наверняка я туплю. В понедельник выясню, что значит в Pixhawk4 нет автовзлёта и парашютной посадки, наверное что-то не так понял. Хочется, чтобы как у Геоскана, пульнул, а он зазузжал моторчиком и улетел, а когда прилетел, выключил моторчик, выпустил парашют и посадка. Ну как-то так себе представил, а оказывается не все так просто 😦
По настройкам выпуска парашюта.
оказывается не все так просто
Это точно. В автомате в зависимости от высоты и скорости ветра разброс места посадки может быть значительным. Правильно задать точку выпуска парашюта - это только с опытом придёт. Да и вручную тоже надо будет потренироваться на большом поле. Перед настройкой автовзлёта надо чтобы самолёт нормально летел в ручном режиме. Потом посмотреть как самолёт летит со стоковыми настройками ПИДов в режиме FBWA и попробовать автоматическую настройку AutoTune (примерно с 6.25). Только потом настраивать автовзлёт. Иначе с наскока можно наломать дров.
Перед настройкой автовзлёта надо чтобы самолёт нормально летел в ручном режиме.
А как он такую здоровую дуру как X8 запустит без автовзлёта? Да ещё и проверит “нормальный полёт в ручном режиме” без опыта управления и без FPV (по FPV триммировать в разы быстрее и точнее)? Я выше писал, что в мануал лучше переходить из стаба, когда там “в фоне” отработал автотрим.
Потом посмотреть как самолёт летит со стоковыми настройками ПИДов в режиме FBWA
По своему опыту скажу, что крыло 840-900 мм вполне себе нормально взлетает с автовзлёта тупо с дефолтными пидами и только потом уже может попасть на “воблинг” (обычно при взлёте против ветра в 5-7 м/с), поскольку для такой “мелочи” пиды сразу нужно уполовинивать (но закопано в доках это довольно глубоко) - то есть стоковые пиды как раз и рассчитаны примерно на 1,5-2 метровые “дуролёты”.
А как он такую здоровую дуру как X8 запустит без автовзлёта? Да ещё и проверит "нормальный полёт в ручном режиме.
4 метра крылья без автовзлёта и проверка в ручном режиме делается так
Проблема не в размерах, а то что задний проп Х8 по телу физического лица задевает.
А как он такую здоровую дуру как X8 запустит без автовзлёта?
Примерно так. Или так.
Примерно так. Или так.
Да старт модели с задним мотором напоминает танец с саблями.
Примерно так. Или так.
Ну-ну, советуйте-советуйте…
Я с интересом пронаблюдаю ваш “тихий слив в сторону” когда человек расхерачит крыло при первых попытках запустить свой x8 или x5 в мануале.
При том, что с автоланча и далее FBWA оно спокойно полетит при выполнении стандартных “предстартовых процедур” - центровка, адекватность отклонения элевонов “по стику” и “на компенсацию крена”, тяга (в том числе правильность установки пропеллера).
Ваши советы “начинать с мануала” проистекают от времён, когда автопилоты были, мягко говоря, ненадёжными, а сейчас что арду что айнав способны увезти и довезти ОЧЕНЬ криво настроенную модель (видал и талон с абы как выставленными тягами, у самого крыло, заработавшее малозаметную “крутку” при транспортировке, после взлёта в стабе, автотриммирования, полёта в мануале и посадки имело “при стике по центру” задранный чуть ли не на 30 градусов правый элевон - но ведь ЛЕТАЛО И НЕ ПАДАЛО!) . Не буду разводить холивар - просто ВИДЕЛ не одну такую “жертву олдскульщиков”. 😁
А на банджу его и в два лица запускать. Пестня.
Ну-ну, советуйте-советуйте…
Я с интересом пронаблюдаю ваш “тихий слив в сторону” когда человек расхерачит крыло при первых попытках запустить свой x8 или x5 в мануале.
При том, что с автоланча и далее FBWA оно спокойно полетит при выполнении стандартных “предстартовых процедур” - центровка, адекватность отклонения элевонов “по стику” и “на компенсацию крена”, тяга (в том числе правильность установки пропеллера).
Ваши советы “начинать с мануала” проистекают от времён, когда автопилоты были, мягко говоря, ненадёжными, а сейчас что арду что айнав способны увезти и довезти ОЧЕНЬ криво настроенную модель (видал и талон с абы как выставленными тягами, у самого крыло, заработавшее малозаметную “крутку” при транспортировке, после взлёта в стабе, автотриммирования, полёта в мануале и посадки имело “при стике по центру” задранный чуть ли не на 30 градусов правый элевон - но ведь ЛЕТАЛО И НЕ ПАДАЛО!) . Не буду разводить холивар - просто ВИДЕЛ не одну такую “жертву олдскульщиков”. 😁
Я именно так свой первый skywolker2013 нещадно бил об землю(слушая Советы типо «научись на ручке , а потом автопилот») потом поставил всё же стабилизацию и УРА.
Ну я бы запускал тоже в стабе. Потом порулить, если адекватен то можно повыше залезть и там мануал дать, и то исключительно для определения кривости модели. Еще центровку очень быстро можно в мануале вычислить.
На скае как то летали. Что то не то , как то не так летит. В мануал переключили , а он бедняга на хвосте нанцует. АКБ сьехал и ЦТ ушел. АПМ даже с таким раздраем рулил.
А вот с вроде правильно настроенным автовзлетом расхерачил 2 раза х-8.
В итоге взлет в стабе -набор-и потом автовзлет. Всё видно что как: углы, газ и подхватить можно если что не так. Подправил, теперь нормально, и уже забыл когда что то билось, ломалось, не так взлетало.
Резинку растянул, авто дал,отпустил, развернулся и пошел к машине к компу-телевизору. Контроль взлета по звуку мотора.😁
Это ни о чём не говорит. Первые Х8 (правильно собранные) летали без АП и неплохо. Вот например ребята нагрузили старых аккумуляторов, доведя взлётный вес до 4 кг и самолёт нормально летел.
А как начать - каждый решает сам. Можно и в режиме FBWA взлететь, а потом посмотреть как самолёт летит в ручном режиме.
Ну вообще до автокалибровки лучше авторежимы не включать. Мало ли.
Купите FX-78 там для пальцев дырки есть!!! Настройка параметров как на X8 смело ставьте для начала. Значения есть у Ардупилота на сайте. Кто сказал что Пиксе нет посадки с парашютом и автовзлета? Издеваетесь что ли? Просто этим парашютом в жизни не пользуются так лучше посадить в траву , а если места мало то и с парашютом там трендец будет. Ну если купол спереди с камерой. На X8 обычно камеры для геодезии под брюхом, так створку делают , чтобы объектив закрывала при посадке.
Просто этим парашютом в жизни не пользуются так лучше посадить в траву , а если места мало то и с парашютом там трендец будет.
А если на местности травы нет? Тырса там или щебеночка какая, чертополох в обнимку с верблюжьей колючкой, пашня после плуга или вообще после дождя, кривой рельеф, да мало ли что еще? Это у нас хобби - выбираем удобные места, а у людей работа - должны летать где скажут. Потому им парашют - меньшее зло, как и на военных беспилотниках.
Спасибо мужики. За три дня узнал много полезного, не думал, что здесь такое большое сообщество профи и увлечённых людей. Думаю с вашей помощью всё получится. Пока до конца не определился с самолётом, воспользуюсь старым крылом друга, у него же возьмём автопилот Pixhawk4. С понедельника начнём тесты и пробные полёты (в перерывах между основной работы 😃 По результатам настройки буду писать, снимать видео и естественно задавать вопросы. Заранее спасибо.
Да, думаю Х8 не подойдёт совсем, так как одному таскать по полям (+другое геодезическое оборудование), да ещё и запускать в одно лицо-не реально!
Так может не самолет?
Так может не самолет?
Зависит от размеров “сканируемых” площадей. Если большие и требуется охват с приличной высоты - то коптер не потянет.
Хотя мне ещё вот итересно - а как потом геодезисты учитывают отклонения по роллу-питчу для каждой фотки, снятой с крыла? А там ещё и высота над поверхностью “в формуле”. То “просто так пофоткать по программе” не выйдет, если фотоаппарат не на гироподвесе.
Так может не самолет?
Ну на самом деле думал о разных вариантах. Для больших площадей и протяжённых маршрутов коптер не годится, только самолёт. К тому же он выйдет подешевле. Что касается возможности геодезической работы на самолёте, то Геоскан 101 уже всё, всем доказал, в том числе и на счёт съёмки без подвеса. Но его стоимость почти в полтора ляма слегка остужает пыл 😃
Если в вашей помощью освою Pixhawk4, то потом можно будет и про коптер подумать 😃
Спасибо мужики. За три дня узнал много полезного, не думал, что здесь такое большое сообщество профи и увлечённых людей. Думаю с вашей помощью всё получится. Пока до конца не определился с самолётом, воспользуюсь старым крылом друга, у него же возьмём автопилот Pixhawk4. С понедельника начнём тесты и пробные полёты (в перерывах между основной работы 😃 По результатам настройки буду писать, снимать видео и естественно задавать вопросы. Заранее спасибо.
Да, думаю Х8 не подойдёт совсем, так как одному таскать по полям (+другое геодезическое оборудование), да ещё и запускать в одно лицо-не реально!
Таскать одинаково что х5 что х8. Запускать тоже . Придете рано или поздно к катапульте. В х5 вам просто не хватит места. АП+фото+GNSS+батареи+паращют. Геоскановский фюзеляж суть пустая мыльница(2 корки на текстолитовом скелете). В пене такого обьема не получите. Или придется вам ужаться по батареям, но тогда получите 30-40 минут полета. Это при нормальной скорости сьемки до 72кмч 50км пройденого пути(в негоже холостые взлёт посадка +вылеты на разворотах).
В х5 вам просто не хватит места. АП+фото+GNSS+батареи+паращют.
Судя по фоткам, в x5 pro четыре отсека - три верхних и один нижний
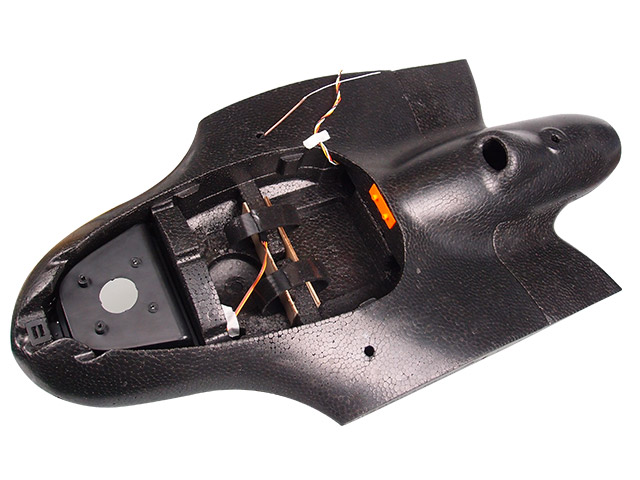
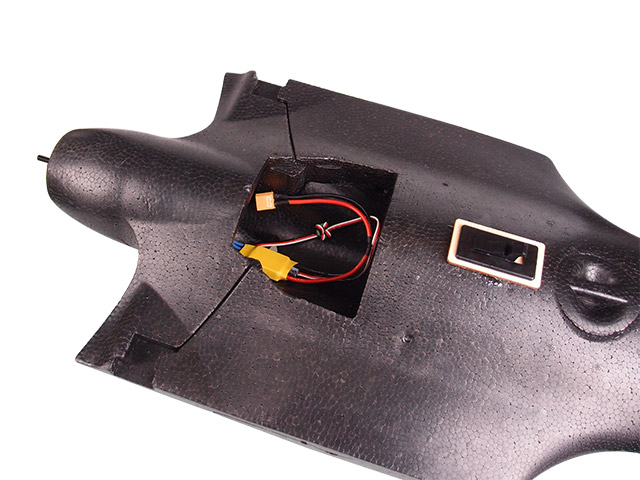
С верхними понятно
- автопилот и GPS, опционально Пито
- фотоаппарат - там как раз и лючок с сервой для его открытия снизу)
- аккумулятор - он как раз в районе ЦТ получится, что позволит ставить аккумуляторы разного веса без нарушения центровки
Нижний явно не под батарею (будет “висеть” на крышке) - теоретически, туда можно как-то впихнуть парашют, а перед его выпуском делать “горку” и переходить в пике с выключенным мотором, чтобы парашют вышел ровно. Пропеллер, естественно, нужен складной.
Геоскан 101 уже всё, всем доказал, в том числе и на счёт съёмки без подвеса.
А у вас есть их фотоаппарат, их автопилот и их софт обработки-привязки, чтобы воспользоваться “доказательствами”? 😁
У вас будет арду с его MP и какой-то фотоаппарат, а софт “учёта параллаксов” придётся писать самим. 😃
ПО сейчас у всех для обработки одно и тоже в большинстве случаев. Фотомоды там всякие и похожие, они всё шьют уравнивают.
По поводу отсеков, АП со своим ЖПС это понятно. НО нужна еще ГНСС антенна и модуль (джавад какой нибудь), это если говорить о нормальной, с реально подходящей для геодезии сьемке, а вот её в Х5 я не вижу куда вкорячивать. Хотя может человеку не нужны такие точностя и хватит навигационного ЖПС, но там точность в лучшие времена 50см-метр, а надо 3-5 см. По фразе … таскать разное геодезическое оборудование… я предполагаю что товарищ “голову” в поле потащит.
В принципе вкорячить можно и в Х-5 , но время товарищи время.(полетное)
Да уж, нормальное геодезическое оборудование обойдётся в разы дороже всего самолёта. Видимо надо сначала определиться именно с ним, а потом подбирать носитель, ну и на АП не экономить.