EagleTree Vector FPV Controller

Удалось найти и перевести ещё несколько непереводимых ранее строк. Почти полностью перевёл страницу Display Hardware Settings настройки экрана и ещё кое-что. Предлагаю очередную версию, а также заставку, с помощью которой, можно выбирать версию запускаемой программы (11.78 английская, 11.78 русская или 12.02 beta). Для этого необходимо скопировать файлы из архива в папку установки и запускать программу через Launcher.exe.
Заметил, что на одном компьютере просмотр диаграмм работает нормально, а на другом некорректно. Пробовал переустанавливать, но ничего не меняется.
Спасибо большое за перевод )) Насчет статистики налета-20 часов полета без крашей , обнаглел до того,что уже летаю ночью с ч/б камерой(она видит ночью ) Есть небольшой косячок по осд-немного расплывчатое изображение информации на мониторе, грешу на передатчик,потому что напрямую все четко) Надеюсь замена решит этот огрех.
Ну вот, сегодня встретился с планетой…😦
Был подлет на новом месте (на расстоянии 15 км от предыдущего места взлета). Ветер южный, скорость не более 2-3 м/сек.
Компас не калибровал, проверил что он работает адекватно (сверил показания по компасу в телефоне).
Обновил Home position, взлет с 2D, переключение в 2D-H, затем на высоте 3 метра переключение в Loiter, изменение чувствительности на Gain Knob со 100% до 40%, проверка реакции на отклонения по питчу и ролу, ленивый разворот на 180 градусов вокруг Yaw, потеря стабилизации, кульбит в воздухе с падением на левую сторону, лопасти приняли удар и сломались, коптер перевернуло через голову (стойка GPS оторвалась от рамы) и поставило горизонтально.
Можно сказать, что отделался относительно легко, но осадочек остался…😃
Что сделано не так, в чем причина потери стабилизации? Техническое видео низкого качества, поэтому прикладываю скрины.Прошу опытных товарищей посмотреть логи:
yadi.sk/d/9fMwNGJQtT8PDЧто думаете, ребята, в чем была проблема?
Посмотрел ваши логи вот скрин
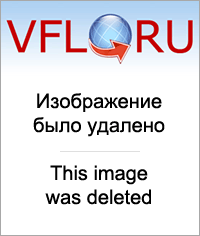
что тут видно:
в момент падания очень резко падает ток, создаются дичайшие показания на акселе и коптер падает, вектор даже указывает событие как потеря стабилизации у него просто не было возможности стабилизировать т.к как ток сильно просел а напряжение стало расти, так происходит когда нагрузку снимают, из этого делаю вывод что вектор не причём был какой то не контакт между силовой частью и вмг
А не наоборот? 😃 напряжение просело, а ток стал расти.
Не на оборот! не знаю куда вы смотрите, коричневое ток, синие напряжение слева же подписи есть
Точно, перепутал. Значит либо не контакт в ВМГ, либо тупо проп отлетел.
либо тупо проп отлетел.
это вообще не подходит, если проп отлетает ток не будет падать лавинно
Так и не победил я горизонтальную раскачку, стаб по питчу почти до 0 ставил , сука дешевый Шторм стабилизирует лучше. Талон без стаба летит приятнее.короче Вектор на продажу
короче Вектор на продажу
На Скай поставь, на нем нормально у меня летал.
Самое интересное , что при длительном общении с производителем, после всех рекомендаций и наглядного полного видео полетов, мне ответили, что они рекомендуют только на самолет “планерного типа”. Это связано и не только с алгоритмом отработки стабилизации , но и работой газа, а так же с отображением вариометра.
На Скай поставь,
На тихоходном крыле стоял , тоже норм было. Но тут постоянно дует, тихоходы не подходят. Талон то что я искал, летит волшебно, осталось новый ап подобрать Вектор к сожалению не подошел. Хотя осд по моему лучшая у него.
осталось новый ап подобрать
“Зелёного” не рассматривали? Пользовался RVOSD, “Зелёным” и теперь Вектором. Все они Зелёному проигрывают.
“Зелёного” не рассматривали?
Думаю пока основные кандидаты, Зеленый и 41 Фишка, пока курю соответствующие ветки.
Для меня было важно: меню OSD и Контрольная панель на русском; голосовое сопровождение тоже на русском. По имеющимся характеристикам и гибкости настроек АП шагнул далеко и работа продолжается. Автовзлёт работает, автопосадка с большим натягом (зависит от модели).
Вектор оказался у меня случайно, некоторое время лежал без дела, потом использовал его в качестве OSD на FPV вертолёте. Теперь решил “поженить” двух незаслуженно забытых, и установил на цессну EPO размахом 1,35 м. С ней Вектор справляется без проблем.
размахом 1,35 м. С ней Вектор справляется без проблем.
судя по моему опыту и коментам Олега с Бд5 вектор че-то скорость не любит, на Буффало крыле работал прекрасно. Но оно медленное.
“Зелёного” не рассматривали?
это чего такое ? не в теме? смолтим что ли ?
это чего такое ? не в теме
скорость не любит
Думаю, что просто сказать “не любит скорость” не достаточно (даже в цифрах), зависит от многих вещей в том числе и от модели. Посмотрел логи, средняя скорость в районе 60 км/час, максимальная 115 км/час. Замечу, что настройки дефолтные.
Возможно я применил не тот танец с не тем бубном)))) возможно дело во мне, но тем не менее.
Новая система от Смаллтим - SwiftAI Next Generation - автопилот+телеметрия+ИМУ
дороговатая система
Как верно заметил Денис (Yden), логи свидетельствуют о проблемах с питанием ВМГ (пост #1471). Это похоже поспособствовало очередному падению квадрика, но уже с высоты 52-х метров:
www.youtube.com/watch?v=KGfEqplAGlM
Итог: поломанный луч, три пропа, стойка GPS, видеопередатчик, сильно деформирована LiPo.
В дополнение ко всему плохо проведена предполетная подготовка. Компас откалиброван на месте взлета, сверены показания АП по компасу в телефоне, обновлен Home position, взлет с 2D, переключение в 2D-H, подъем на высоту 4 метра, удаление на 234 метра и срабатывание режима FS(?!) Во время всех этих манипуляций не обратил внимания на выскочивший разъем из 2W бустера!
АП исправно включил RTH, квадрик начал поворачиваться по Yaw с набором высоты. В ходе этого несколько раз связь с моделью восстанавливалась и мной предпринимались попытки вернуть контроль над моделью в режиме 2D-H, при этом естественно отключался RTH, снова срабатывал FS, в итоге – снос модели по ветру на 74 метра от места взлета.
В моменты отклонения квадрика по питчу происходила резонансная раскачка модели по ролу (начиная с 3м 04сек видео). Возможно причиной этому потеря связи или избыточные Gains, а возможно и не исправный регулятор? Об этом ниже.
Полетные логии здесь:
yadi.sk/d/tdUssreMtgaJh
Нужно заметить, что в ходе проверки силовой части был обнаружен регулятор (подключен в Канал 1), который при снижении оборотов срывал синхронизацию, что приводило к неравномерному вращению вала электродвигателя и даже полной его остановке. Переустановка регулятора в другие каналы АП подтвердила эту проблему.
И все же VECTOR оказался для меня крепким орешком 😃
Вопросы к экспертам:
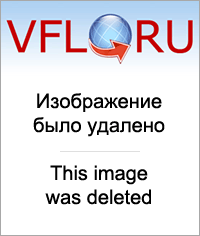
- Какие Gains можно прибрать для исключения самовозбуждения АП при маневрировании? Текущие значения на фото ниже.
- Какой предельный угол по питчу и ролу считается допустимым? Где в настройках это регулируется?
- Как ведет себя коптер при включении RTH, также как у меня делает почти полный оборот?
- Какая скорость подъема и посадки считается оптимальной? У меня установлены значения 1,5 и 0,9 м/сек. соответственно.
- Стоит ли включать автопосадку при RTH?
- Как поведет себя коптер при снижении напряжения питания: потеряет стабильность и опрокинется или медленно опустится? Какое питание оптимально для АП: 11,1В или 14,8В? Какая предпочтительна емкость в mah для 15 мин полета в спокойном режиме? Текущий конфиг: рама F450, двигатели А2212/13T 1000kv, пропы 10х4.5, батарея 11,1v 3700 mAh 35С.
- Сейчас у меня установлена версия 11.78, нужно ли обновлять версию Software?
Заранее благодарен за ответы!
Скрины экранов с текущими Gains и Google Flight Map:
Столько вопросов… Отвечу на то что знаю- последнее время было обнаружено точно два дефекта,и один 50\50 с плохой работой регулятора два случая литлби и один дис 30А .Во всех случаях коптер падал.Как проверить? Прикрутить коптер к бетонной плите или чугунине и газовать во все стороны, на малом газу при сильном повороте по яву ( видно глаом как движки по диагонали уменьшают обороты,другая диагонать прибавляет) можно заметить неадекватную работу регулятора-срыв синхры вплоть до полной остановки движка.Прошивка бихэли,скорее всего брак регулей чем неправильная настройка прошивки, три других то работают адекватно.В силу своего накопившегося опыта падений коптеров научился проверять коптер после сборки сначала на веревочках подвесить и посмотреть что и как,покрутить пиды, потом над пышными кустами подергать коптер по диагоналям наблюдая есть ли раскачка(коптер должен сразу гасить колебания) потом еще несколько тестов на улет ,возврат, только потом уже проба дальности фпв и полеты. Теперь про вектор : №1 скорее всего дело не в векторе,а неправильно подобранной вмг(слабые движки, высокий газ висения,либо низкий ,в идеале должен быть 45-55 %)№ 2 я поставил 25 гр ,что позволяет летать со скоростью около 45 км\ч , гуи нет под рукой-прошу прощения за слова без пруфа )) № 3 да, поворачивается мордочкой , вроде в гуи есть галочка об отключении поворота (могу путать с арм) №4 по дефолту №5 на любителя и от ситуации.№6 если нет отсечки на регулях по напряжению то коптер скорее всего просто сядет. №7 я обновился на 12 с чем то там, вроде как верится что исправляют баги.
Вот блин,забыл зачем сюда заходил-появилась такое предупреждение на 10 минуте полета на кваде (за орфографию не отвечаю ) research error detected , что за нафиг не нашел в просторах инета.Перевод понятен, но куда намотать изоленту так и не понял 😃 до этого налетал около 25 часов,пояаилась после смены передатчика и камеры , плюс перенес передатчик подальше от гпс , на 1280мгц и 1240 мгцнемного душил гпс.