Activity
Каменные джунгли Кунцево:
ankl.su/#pano:166Рассвет над Терлецким лесопарком:
ankl.su/#pano:160
На что снимали и сколько фоток в этой панораме?
Он не по термастату ориентируется , а по показаниям датчиков. Которые меняются в зависимости от температуры. Если вы откалибруете ее при -10 то она у вас на улице практически соазу будет запускаться.
Я пока не понимаю )
Вот мы пришли к выводу о том, что при разных температурах - разные показания датчиков.
Это значит, что для того, чтобы достичь тех показаний датчиков, которые были в момент калибровки дома - надо нагреть назу до той температуры дома. Кто же в минус 25 это сделает? 0_о если внутри у назы нет управляемой грелки т.е. термостата, ясно, что температуры дома не достичь при такой разнице окружающей среды в !50! градусов.
Сам процессор и датчики нагреватся до температуры при которой были откалиброваны.
Станислав, это очень интересный для меня поворот.
Я калибровал дома. Летал в -25. Неужели, что дома, что в минус 25, после “прогрева” Наза внутри будет держать одну и ту же температуру? (например +50 градусов). У нее же нет внутри (я надеюсь) термостата для поддержания нужной температуры 0_о при любой окружающей.
Подскажите пожалуйста, стоит ли обновляться с 4.02 на 4.06? какие преимущества?
Судя по release notes: dl.djicdn.com/…/NM_release_notes_en.pdf
изменений не так много, но почему бы не кликнуть и не обновиться?
dl.djicdn.com/…/NM_release_notes_en.pdf
Пара изменений 4.02 --> 4.04 и пара 4.04 -->4.6
Ну типо того. Только не понятно, делается это физически(прогревом), или програмно(подгонка значений близкими к “0”)
Не, прикольно, я не задумывался о таком варианте, спасибо.
Тогда в этом свете, мне кажется, что Наза греется не специально, а чисто из-за того, что процессор начинает работать и всякие резисторы вокруг греются. В конце-концов температура выходит на постоянный уровень и прогрев завершается. Но это все-таки пока похоже на догадку, хотя и правдоподобную…
Если у кого-нибудь есть дополнения, выскажите, пожалуйста, тоже - очень любопытно.
Дело в том что показания датчиков при работе в разных температурах немного могут отличаться
Согласен с вами, Никита. И здесь есть странность: Alexmos, например, говорит прямо: если хотите летать при низких температурах - извольте сделать температурную калибровку. А Naza не требует никакой калибровки при низких темературах, и хорошо держит горизонт, даже если IMU calibration была выполнена дома на столе в + 25.
В датчиках устраняет температурный дрейф
Иван, это интересно… Правильно ли я понял, что при подаче питания на Назу она начинает немного нагреваться, и этот самый “прогрев” - процессор ждет, пока температура стабилизируется?
Уважаемые коллеги, а у кого-нибудь есть мысли, чем конкретно занимается Naza M V2 во время “прогрева”? На самом деле просто интересно, что так долго можно делать?
Я знаю, что в доке написано initializing and self-check - но это как-то слишком расплывчато. 😵 Калибровка IMU делается отдельно из GUI, GPS спутники ловятся после прогрева. Что же это может быть?
Все, я сдаюсь
А лампочки Ардупилота что показывают, что он дизармед (когда, как вы говорите, все отрубается)? Или что он еще в состоянии Armed? Что будет, если заармить и дать газку (без пропов), все равно через секунду все остановится даже при не нулевом газу? Что у вас в параметре DISARM_DELAY? Еще ради интереса можно попробовать FS_CRASH_CHECK = 0.
Сам питаю Ардупилот от бека в разъемы, которые идут вдоль корпуса.
Как побороли калибровку регуляторов?
Мне по прежнему неясно за счет чего он стабилизируется в свободном падении в режиме МАНУАЛ, который не в состоянии держать горизонт, да еще и с нулевым газом - на минимальных оборотах.
ИМХО загадки тут никакой нет. Поддерживаю версию Константина:
я как то проверял авторотацию на мальке весом в 400 грамм. только на коптере был MultiWii. коптер при арме пропами крутил. когда я газ выставил в минимум, коптер начал падать и раскручивать винты в братную сторону. высота была не большая, квадрик с трудом смог раскрутить движки но его при этом перевернуло, а высоты на выравнивание уже не хватило. газ при этом падении я выжал в тапок. видео уже как то выкладывал (смотреть с 5:00):
И у самого коптер при отрубании питания спускался вниз почти горизонтальным блином (при падении дольше 2-3 секунд) за счет вращения винтов в обратную сторону и за счет того, что ЦТ ниже винтов. И тоже разок потом не завелся. С тех пор так не балуюсь.
по второму пункту: Вань! Слушай “русских”! Тебе же говорят куда их проветривать ставить Коллеги из Китайска тоже читают этот форум и делают МНОГИЕ гаджеты из наших же разработок. Я где-то выше писал уже об этом. Сейчас придумаем очередное решение и сразу ждем СЕНСАЦИЯ!, ТОЛЬКО У НАС! Настройки коптеров тоже самое. Мы испытываем, они меняют параметры…что, типа, новое (хотя это тоже самое тюнингованное старое). Про регули: Запаяй их обратно в белую термоусадку чтобы не грелись от солнца и крепи их под пропеллеры ближе к моторам.
Денис, я вот думаю, что красивше и безопаснее для регулей где-то под мотором - он там будет лежать один - окту думаю классическую уже. В принципе там и ветром обдувается тоже… Или все-таки на лучи?
Еще тут странность есть: по умолчанию к регулям шли провода питания 80 см. Но вот серво провода только 30 см. Т.е. их надо удлиннять и класть рядом с силовыми. Не будет ли помех для них и новых крашей из-за этого?
Еще если крепить на луч - надо стяжками. А стяжки будут перетирать регуль… Если что-то прокладывать, так это снова уменьшит отвод тепла 😃
вспотели… жарко им там… Пусти их на лучах! Пусть проветриваются
Ну и вдогонку, что ответил производитель:
Dear Ivan,
The ESC will reduce the power when the ESC at 110 degree centigrade.
When we make the ESC, we have enough allowance for long battery wires. There is 2pcs of 470uF capacitors, equal to 940uF. When you use 50cm to 60cm wires, the capacitor needed is 740uF to 888uF. The on board capacitor is 940uF. So I think that you can run without additional capacitor. Thank you.
Please advise us your testing with your new frame. Thank you.
Have a nice day!
Вольный перевод:
- Этот регуль уменьшает силу при нагреве от 110 градусов.
- Конкретно регули XC-401-MR - с двумя кондерами по 470uF. Для 50-60 см проводов необходима емкость 740uF to 888uF. Поэтому вполне можно эти реги ставить под моторы.
Друзья, думаю лог выкладывать нет смысла. Напарник разобрал коптер перенести регули наружу, а там…
Сейчас стал анализировать: оба раза глюк случился уже где-то после 30 минут налета в этот день. Т.е. выходит, что ток не так уж и важен, важно, что без вентиляции регули постепенно нагреваются, даже без особой нагрузки на коптер.


Ну это уже неправдоподобно, чтобы мозг както регаировал на изменения высоты по гпс, вы уж извините парни. А если перевод в ручной режим не помогает, то это мозги глючат, а не гпс.
Сергей, ну идея глючащего мозга - тоже под вопросом. Ведь эти логи, которые я потом смотрю - пишет в прямом эфире к себе в память та же программа, которая и управляет коптером. И по логам видно, что она все понимает адекватно: вот пошло снижение высоты, вот автоматически выдан больший газ на моторы, вот включен ручной режим и т.п…
Хотя, конечно, можно предположить, что программа записывает в лог “полный газ моторам”, а сама тайком передает только 30% и это в лог не попадает…
Вот коллеги здесь наталкивают на мысль, что более вероятным кажется перегрев сначала одного регуля (с этим можно жить) а потом второго вслед за ним (и тут уже как бы и все). Хотя все равно вопросы еще остаются. Ну, надеюсь, на выходных удастся потестировать с регулями наружу. Как только - сразу сюда отпишу.
Как раз про это и разговор. Я не случайно спросил, кто главный по высоте. Мы тестили аппарат с такой же схемой винтов как у вас. Только под пузом 5 кг висело. Так он так же, решил, что ему высоко и погнал к земле. Контроллер А2. Все составные части чуть теплые, в пределах нормы. А глюк очень на ваш похож. И что то меня наводит на мысль, что мутят американцы воду с GPS. И переключение в ручной режим не спасает.
Ого, как вы глубоко копаете… Ну вот сегодня до дома доберусь - выложу лог, и сам посмотрю: вроде можно было вывести отдельно высоту, которую определяет GPS. Там несколько высот есть в логах, надо почитать по них.
А так глюки высотомера у меня бывали - на Криусе - теже яйца, что и Ардупилот с теми же логами. Выглядело это так, даже скриншот нашел (кликабельно):

Красный - высота по барометру.
Зеленый - вроде бы высота по GPS т.к. показывает относительно уровня моря.
Конкретно в этом логе мне повезло (1.5 года назад еще), что в момент скачков я был в ручном режиме. А так - коптер тупо нырял в землю, прямо, как вы говорите. Тогда это решилось продувкой барометра ртом, как бы забавно это не звучало 😃
Судя по графику, первый провал Ардупилот отработал ( стык участка 2 и 3) А дальше? Чего то у него там заклинило или получил ложный сигнал, и на следующий провал контроллер уже не среагировал. Всплеска синей кривой нет. Да и газом вы не отработали.
Значит что то вмешалось в работу. Ищите помеху снаружи вашего аппарата.
И еще, антенна между двух батарей - очень плохое решение. От аккумуляторов такое поле идет, не всякая электроника выдержит.
первый провал случился вначале 2 участка. Обратите внимание на небольшую просадку высоты и сильный скачек синего графика (рост выдаваемой команды моторам). После этого момента синий график идет уже явно выше зеленого втечении секунд 30. А на первом участке, где все было впорядке, он шел ниже зеленого - т.е. УЖЕ что-то случилось такое, что внезапно потребовало больше газа.
Конец второго участка знаменуется резким падением высоты, который Ардупилот пытается компенсировать 100% газом. Коптер был пустой. ПРи 100% газе он обычно превращается в точку на небе. Т.к. я заметил неладное - ушел в СТАБ. С этого момента - синий и зеленый графики - почти одно целое. Можно заметить, как я давал больше 50% газа, но это не помогало, хотя газ висения - меньше 50% - коптерв се равно снижался.
Обращаю внимание на этот момент еще раз: коптер был пустой. В этом случае он - ОЧЕНЬ отзывчивый. Его вертикальное падение даже после выключения моторов можно остановить почти мгновенно. Здесь падения не было, был быстрый спуск, но он не остановился.
В конце 9 минуты я давал газ больше 60% втечении секунд 5 - видно в конце. Приземление это не остановило. И коптер с трех метров за это время опустился до нуля в траву.
Кто на вашем контроллере за высоту отвечает больше ? Бародатчик или приемник GPS
Андрей, на сколько я знаю, показания барометра в приоритете в Ардупилоте. Но и судя по графикам, высоту барометр оценивает вполне адекватно: когда коптер снижался и я паниковал - график идет вниз… Контроллер командует моторам “давай на полную”, а коптер все равно снижается в траву… А почему вы подумали о сигнале с GPS? Ведь когда происходил этот глюк - я включал ручной режим - без GPS и без Барометра, давал газ на полную - коптер все равно опускался. У меня реакция такая - чуть что не так - ухожу в стаб, как-то в нем спокойнее без лишней автоматики.
Рукой если прощупать, должно же было чувствоваться?
Сразу после глюка я ощупывал раму снизу. Там, где лежат торцом регули - она была чуть теплая. Сложно судить по такому о температуре регулей. До полетов коптер проверяли на стенде - крутили 70-80% газа несколько минут и потом резко ощупывали все внутри (крышку не закручивали) - было все холодное или почти холодное.
согласен, но регули в кучу под рамой - это самоубийство
Пока выходит, что так. Но я думал им будет тепло и весело…
Написал еще в Дуалскай вопрос про длину проводов. Как ответят - скину сюда тоже.
я как-то не заморачивался с длиной. Регули под винтами и им там спокойней и прохладно как-то
С 450 и 600 коптером я тоже не заморачивался. Но когда в воздухе 250 тыров - волей-неволей паришься по каждой мелочи 😃
Думаю это актуально для больших самолётов
В нашем случае, максимум 40-50см проводов
Да вот пишут, что на каждые 10см 1 кондей 0_о
If you have to lengthen the battery wires, for whatever reason, add extra electrolytic capacitors in parallel with ESC, never in series with ESC. As a rule of thumb, for every 4inch/10cm extra length/distance between battery and ESC, add an 220uF extra capacitance near the controller (electrolytic condensators, voltage the same as the capacitors already installed, low ESR type) (Ludwich Retzbach, German e-flight author&editor, the ‘R’ in LRK).
И вот удлинняют провода регулей с 20 см до 30 или 50.
matthias-schulze-elektronik.de/…/gfutc-de.pdf
А лучи у меня длинные сейчас и планируются на классической окте - провода придется делать, наверное, как раз 50см.
СТЕСНЯЮСЬ ПОСОВЕТОВАТЬ: А у меня регули находятся в 3 см от моторов на луче. И охлаждение и короткие провода до мотора. У меня также было , регули в кучу под рамой и на ровном месте грохнулся.
Что-то я слышал, что если провода питания регулей удлиннять, то надо впаивать кондеры по 1 на сколько-то сантиметров. Куда-то та ветка на rcGroups делась, но вот есть сохраненная копия гугла: too long battery wires will kill ESC over time
Может, конечно и домыслы, а может кому-то везет. Вообще, это удобно - ESC у мотора. По умолчанию даже Дуалскаевские реги пришли с длинными проводами питания. Но меня напугали, и я испугался 😃
Либо как-нибудь долезть до этих и надрезать термоусадку. Или в верхней пластине “бутерброда” пропилить какую-нибудь дырку (не видел самого коптера, совет вслепую).
Окта вот такая:
drive.google.com/open?id=0B2do-d8mpL0bQ0htQTU0eUR3…
на модели и потом вреале на фотках, можно увидеть, как регуляторы лежат бутербродом друг-к-другу. Есть даже бутерброд из трех регулей. Но я думал, что уж фирменные регули не должны быть такими капризными 😃 Пока надо вытащить регуляторы наружу, например приделать их снизу рамы и проверить на этих выходных. Раз уж почти все говорят, что скорее всего перегрев.
А лог “загадочного” полета имеется?
Имеется. Вечером скину. График сверху - с этого лога.
APM же вроде позволяет запротоколировать газ для каждого мотора? Может попробуете? Если проблема в ESC, это будет сразу видно, так как ESC, которая вышла из игры, будет отмечена на синем графике пиком. Вполне возможно, что колбаса до падения - это попытки отдельных регуляторов перейти на пониженную мощность, что сопровождается ростом общего уровня газа. Так как у вас окта, это не очень заметно, до тех пор, пока таких регуляторов не станет 2 или 3.
Спасибо! Не знал о таком, действительно нужно включить эту опцию и попробовать. Вот, если кто-то тоже будет этим заниматься (выбрать default + motors):
![]()
Ну мне еще производитель регулей написал:
Dear Ivan,
Thank you for your detailed feedback about the problem of fast descending of the multicopter.
This probably is caused by the thermal protection or voltage protection of the ESC.
- Voltage protection. Please set the XC-401-MR voltage protection to low, the default settings is middle. Then you can test the multicopter again to see whether this problem is solved.
- Thermal protestion. The ESC are inside of the multicopter, so the cooling condition is not good. Even the motor current is below 20A, but the MOSFET temperature might be too high and cause the thermal protection of the ESC. Please keep more room for the ESC and keep them open to the air if possible.
I hope that you can solve this problem. Please advise us your testing result. Thank you.
Have a nice day!
Best regards,
если краткто, то либо отсечка регуля по наряжению, либо по температуре.
Чует моя пятая точка, что надо снова садиться за автокад и чертить новую раму с регулями снаружи…
Еще написано, что регулятор сам определяет на сколько ячеек батарейка. Если предположить, что он ошибается при стечении ряда обстоятельств, то при падении напряжения регулятор резко сбрасывает мощность (это видно на графике), а полетный контроллер пытается это компенсировать.
Если бы я был регулем, я бы определял количество банок один раз при старте. Во время работы делать это ни к чему. Конечно можно предположить, что программисты там сидят глупые, но…
С другой стороны, как они пределяют количество банок? По напряжению - это какой-то странный метод. 5 банок полностью заряженых - 21 вольт. 6 разряженных до 3.3 банок - 19.8. Одни загадки
А на регуляторах какой режим cutoff выставлен? Я смотрю на характеристики и мне кажется, что у этих регулей cutoff срабатывает всегда и выражается он как раз в сбросе мощности. Еще написано, что регулятор сам определяет на сколько ячеек батарейка. Если предположить, что он ошибается при стечении ряда обстоятельств, то при падении напряжения регулятор резко сбрасывает мощность (это видно на графике), а полетный контроллер пытается это компенсировать.
Вы правы, совсем убрать падение мощности или отрубание на этих регулях нельзя. Но можно понизить порог. Сейчас выставлено Power Reducing, Low т.е. на 2.5V. Когда было выставлено Medium (2.75) - из-за этого падал уже разок. Но падал секунд через 10-20 после того, как запищали аккумуляторы по отсечке 3.3V. - сам дурак был. Падение напряжения с 3.3 до 3 и ниже при токе 50 - 100A происходит в считанные секунды. А тут, вроде как, потом на этих аккумуляторах еще долго-долго летал и ничего… Но вообще, конечно, напряжно это, что не убрать этот редьюсинг. Но уж очень хотелось к моторам Dualsky регуляторы, которые советует производитель…
Может в этом и причина? Очень похоже на перегрев.
Тут есть нюанс… Первый раз этот глюк схватил на Setup 3 - когда коптер пустой и с легкими аккумуляторами. Там средний ток на каждый регуль - 7-8А из допустимых 40А… Причем глюк схватился, как и второй раз, не после резких движений или какого-то отжига, а просто во время висения в Loiter на высоте 3-4 метра…
День добрый, коллеги. Убедили спрашивать в этой теме. Помогите, пожалуйста, кто что думает?
Большой соосный октакоптер.
Моторы DUALSKY XM5015TE-7MR 340kv (~70$)
Реги DUALSKY XC-401-MR 40A ESC 433Hz (~40$)
16’ RCTimer пропы. Карбон.
Ардупилот 2.6
6S LiPo (два аккумулятора в параллель)
Измерения времени полета проводились с четырьмя разными вариантами:
Setup 1: 32000mah 10C, 10kg (без камеры) 24 минуты. Hover throttle ~ 50%.
Setup 2: 32000mah 10C, 12kg (с камерой) 16 минут. Hover throttle ~ 55-60%.
Setup 3: 16000mah 30C, 8kg (без камеры) 17 минут. Hover throttle ~ 40-45%.
Setup 4: 16000mah 30C, 10kg (с камерой) 10 минут. Hover throttle ~ 50%.
Итого самый большой ток висения 120A (15A на регуль из 40A допустимых)
Моторы чуть теплые. До регулей не добраться - они врнутри корпуса.
Летал примерно 10 раз. Из 10 раз глюк был пойман два раза.
Первый раз: Setup 3 после 9 минут полета.
Второй раз: Setup 2 после 6 минут полета.
Коптер висит спокойно в Лоитере (с GPS и баро). Потом, вроде как, его чуть начинает колбасить и он выравнивается. А потом он совершает резкую и неожиданную посадку - почти падение. Не помогает даже перевод в режим Stabilize и полный газ вверх. Пищалки выставлены на 3.5V на банку - не пищат. На земле проверяю банки - на каждой 3.85V, 3.9V. Перезапускаю питание, взлетаю на этих же аккумуляторах и летаю еще 5-10 минут до сигнала пищалок без происшествий.
В остальном (не считая вибраций, которые не дают нормально работать подвесу - коптер работает хорошо (полет по точкам с телефона, автопосадка, автовзлет - все окей)
Прикладываю графики из логов (кликабельно)
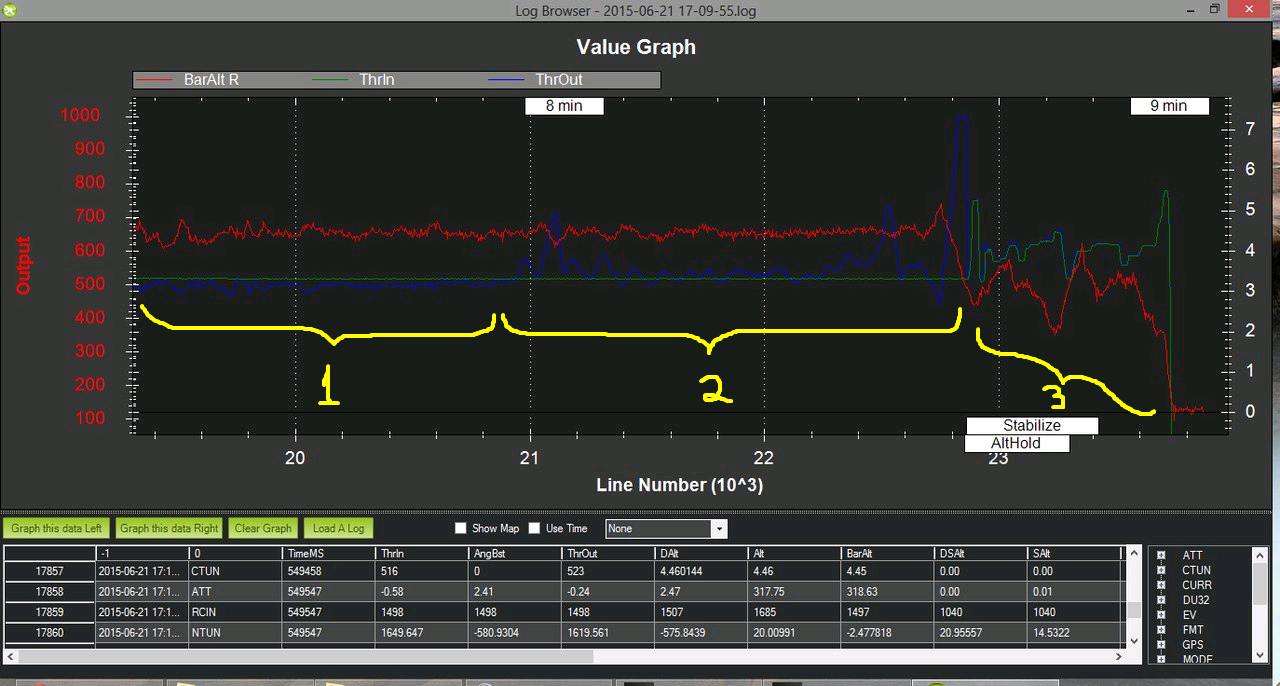
Сверху показаны минуты.
Красный график - высота по барометру.
Зеленый - газ, передаваемый с пульта.
Синий - средний газ выдаваемый на моторы Ардупилотом
1 часть - спокойное висение на месте в режиме Loiter(с GPS и баро)
2 часть - начало глюка - коптеру понадобилось дать больше газа для удержания высоты. В конце второй части - все стало критично и Ардупилот выдал 100% газа, но все равно снижение продолжилось.
3 часть - я переключился в Stabilize (чтобы напрямую управлять газом), но это помогло не на долго - коптер все равно приземлился довольно жестко не смотря на 70-90% ручного газа.
Итак, глюк аккумов я отметаю - пищалки молчали, глюк повторился на других аккумах другой емкости. После глюка на этих же акках еще долго можно летать.
Глюк прошивки? Но Ардупилот адекватно оценивает высоту и понимает, что он снижается (видно графики)
Перегрев регулей? Но фирма же. И они на 40 ампер, а в Setup 3, график которого приложен - средняя нагрузка на регуль - 7-8 ампер.
Не знаю, что и думать и как быть…
честно скажу, я снял тросы, прорезинил лучи с моторами и повесил ND4 фильтр на гопрошку. Стало еще лучше. Без всякого желе.
Денис, я видео ваше видел. Впечатляет. Оно меня сподвигло некоторое время поразмыслить над тем, как бы переделать мои мотормаунты, чтобы тоже вставить резинки. Но таких резинок я не нашел - был в Максидоме и еще каком-то сантехническом магазине (искал не очень рьяно). И потом есть еще проблема одна - моторы вот такие у меня
ru.aliexpress.com/item/…/1566234767.html
между отверстиями всего 25 мм. Т.е. до центра - 12.5мм из которых 4мм - центральный выступающий вал со стопорным кольцом, которое обязательно будет тереться о такую резинку 😦
А моторы такие оказались - полный ПЭ. У некоторых ротор может не просто ходить вниз-вверх, но и чуть накреняться влево-вправо. Сапорт Дуалская пишет “это наша первая версия - попробуйте более свежие обновленные модели” 0_X
Когда держишь коптер в полете за ноги (соосная окта ~10кг) - ощущение, что в руках небольшой перфоратор. На видео желе как такового нет, есть дрожание (подвес трехосевой с зеркалкой) и от этого дрожания мозги подвеса сходят сума: вертется как хочет и наклоняется, куда хочет. Попробовал другой подвес с другими демпферами - стало лучше, но не идеально. Так что вот теперь колхожу тоже на тросах - сегодня напилили на ЧПУ крепления, буду шкурить, красить и вдевать тросы, но пока не знаю, какой длины. Взял 2мм, но есть возможность их поставить 19 штук по кругу.
еще проверил тросиковую виброразвязку на своем долголете (тут 1 мотор\проп отбалансирован на трубке остальные на стенде. вибра приличная)
отлично работает. тросики d=3mm L=65mm
Никита, а можете, пожалуйста, поподробнее нафотографировать тросиковую развязку? Как закрепляли тросики? Что за белая штука такая снизу? Как рассчитывали длину и количество тросиков? На глаз? Использовали ли какие-нибудь резинки, чтобы притянуть подвес ближе к верху или просто все висит на тросах? Спасает от вибраций полностью? Может, тогда, и ВМГ балансировать не надо?
Спасибо 😃
Интересно,думал никого рядом нету
Одна проблема,я уже на 480ый вертолёт пересел.Маловато ему места,но нужно будет слетаться. Как раз собирался начинать проект квадрокоптера,пообщаемся,расскажете чего интересного
Да, давайте полетаем вместе, обменяемся опытом ) Мы сегодня в том парке в 7 вечера чутка полетаем. Обещает быть парень со своей мясорубкой-вертолетом.
Если есть контакт - стукнитесь туда мне vk.com/limon
а то я тут не частой гость. А так - старемся каждую субботу встретиться тусовкой побольше, время, место и тп решаются вот тут 😃
vk.com/copterpilot
старая тема.Вообще если нету возможности выбраться куда то на машине, летаю тут 60.001380, 30.455757 или у дома
любители старины 😃
Мы вот тут летаем, правда не вертолеты.
old.maps.yandex.ru/-/CVWfqC0f
Довольно весело. Иногда надо только ждать, пока народ пройдет мимо.

Сверло а 4 мм , с двух сторон кусочки резинового шланга для поджатия пропа и вперед ))
Спасибо! Но вот проблема - пропеллер должен быть строго перпендикулярен сверлу. 1 градус отклонения баланс уже не баланс… Проверял это на похожей схеме. А как кусочки шланга закреплять? как их разрезать идеально ровно так? Куда сверло ставить? Пересмотрел кучу вариантов “самодельных” и у всех какие-то изъяны.
Товарищи! Как балансировать вот такие пропеллеры?
www.rctimer.com/product-923.html
у них отверстие для крепления - 4мм. Конусы у стандартных балансиров тупо не влезают.
Может есть у кого на примете хороший балансир подходящий?

Коллеги. Вторую неделю бьюсь. Думал, что знаю достаточно о ПИД и стабилизации, но куда там.
Приобрел вот такой подвес
www.aliexpress.com/item/…/1931896902.html
к нему AlexMos 32 (SimpleBGC 32)
Подвес пришел вот с такими моторами
ru.aliexpress.com/item/…/1553915978.html
продавец утверждал, что они мощнее, чем те, которые были нарисованы в комплекте.
Камеру ставлю Canon EOS 100D с каким-то стандартным объективом = 800гр всего.
Подвес отбаллансировал. В руках работает почти идеально, но в воздухе - полный *****: из-за порывов ветра крутится как хочет. Причина: очень слабо держит roll и yaw - чуть рукой тронешь - на 45 градусов улетает. Увеличиваю POWER, становится лучше, но моторы начинают сильно греться (при power = 150 через 5 минут держать почти невозможно). Прикладываю текущий скриншот настроек и фотка подвеса. (ПИД настраивал сам, на автотюне результат не меняется, хоть и коэффициенты другие)
Подвес питается от 3S или от UBEC 12V.
(Кстати, брать именно этот подвес не рекомендую. Выслали не тот набор карбона, алюминиевые части сделаны криво, не аккуратно, продавец по две недели не отвечал на сообщения и т.п. - пришлось самому допиливать “напильником”)
Похвастаюсь… )) Моя рама с этой же батарейкой летает 28 мин. Для меня замечательность заключается не только в прочности, а еще и в эстетике. Если вещь не красивая к ней не хочеться прикасаться.
Что-то я не разгляжу, как вы моторы приделали к круглым лучам?
Миленький ты наш!.. Как же можно адаптировать парусные яхты к прогулке по тонкому льду слегка присыпанным снегом.
Либо Вы там обкурились, либо у меня с головой не всё в порядке- поэтому и пишу!!!
Кто же вас, странных моделистов яхт и буеров, знает? 😃 Может и просто захотите прийти? Или, может, льда не будет… Как по мне - буер хорошо по льду ездит. Но знает ли он об этом? Лишь бы не провалился 😮
Уважаемые %usernэймы%-моделисты! Понимаю, что времени осталось крайне мало, но все же!
28го декабря (воскр) в Петербурге планируется весьма специфическое мероприятие, организуемое коллективом спортсменов-парусников - Новогодняя гонка на Фонтанке на парусных швертботах.
Организаторы - большая инициативная группа людей, подробнее о которых можно узнать вот тут:
vk.com/spbsailing?w=wall-80872458_4
Они уже успешно проводили эту регату дважды и хотят сделать из нее некий праздник не только для себя но и для других.
Однако, несмотря на надежды организаторов касательно того, что вода к этому времени не замерзнет, прогноз в начале недели резко поменялся и появился риск того, что лед все же встанет. Толщина льда в этом случае будет недостаточной для того чтобы устроить гонку на ледовых яхтах (буерах).
Организаторы хотели бы пригласить моделистов, которые имеют радиоуправляемые парусные яхты и прочие радиоуправляемые модели, которые можно адаптировать к езде по тонкому льду (возможно, слегка присыпанному снегом). Для любителей радиоуправляемых яхт можно организовать полноценное судейство (будет парусный судья). или же просто без лишних сложностей собраться двумя тусовками в центре города и продемонстрировать всем свои снаряды.
Организаторы твердо намерены продолжить традицию парусных новогодних гонок, так что в любом случае привезут либо яхты, либо буера, либо еще что-то связанное ветром.
Если у кого-нибудь будут близкие по духу идеи - пишите мне или лучше админам группы vk.com/spbsailing
Спасибо!
На rctimer есть бюджетный подвес уже с моторами rctimer.com/product-987.html и если мозги доложить, то на них скидка. Недавно была отличная распродажа. По механнике мне больше нравится вот такой www.ebay.com/itm/141343776676. Но он без моторов. Моторы там же можно купить (рстаймер), в том числе с трубчатой осью.
Спасибо!
А как же с тем, что верхний мотор стоит вверх ногами? Т.е. совсем независимо от коптера подвес крутиться не сможет…
Коллеги! Облазил ebay, aliexpress, goodluckbuy и т.п.
Бюджет - до 1000$ неужели не найти ничего достойного?
Из требований: свободное вращение по YAW (либо провода внутри, либо YAW мотор вверх осью)
Удобная подстройка под мою камеру.
Нород, проблема: не работает follow me.
В лоитере летает, по точкам летает, RTL делат. Ставлю с телефона follow me - никакой реакции. Пробовал и DroidPlannet и AndroPilot 😦
(Позиция телефона на карте показывается, если что - тут все ок)
На 3.1.5 у нас летал. В опциях программы режим включен? Он включается галочкой.
Ну да: ставлю Loiter, ставлю галочку “Follow me”, программа спрашивает, уверен ли я, что хочу пробовать бету фоллоу ми, соглашаюсь - коптер остается в Loiter. Тоже самое, если Guided - никакой реакции…
Нород, проблема: не работает follow me.
В лоитере летает, по точкам летает, RTL делат. Ставлю с телефона follow me - никакой реакции. Пробовал и DroidPlannet и AndroPilot 😦
(Позиция телефона на карте показывается, если что - тут все ок)
А вообще, летать с такими дефектами можно, только отбалансировать надо…
Спасибо за ответ.
Но потемнеть ему не с чего - этот кончик ПРОЗРАЧНЫЙ как мутное стекло 0_о.
Понятно что летать можно и придется. Вопрос только в том, купил ли я карбоновый винт, или это какая-то шляпа? 😃