Activity
Эт может быть только если диод повесить общим на 5в, а у меня земля общий
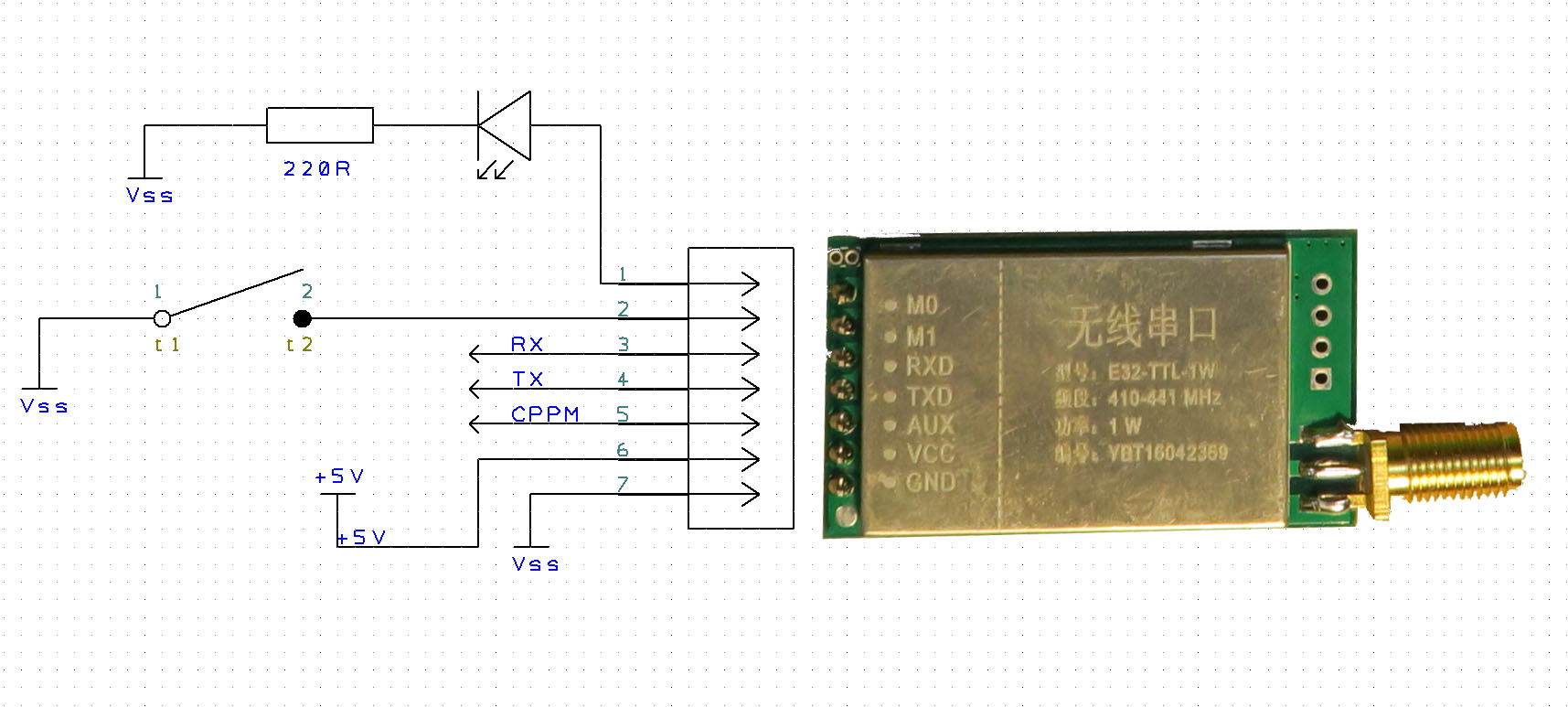
Светодиод подключается анодом (+) на М0, катодом (-) на землю.
Неправда, когда нет сиганала медленно моргает, а когда есть очень быстро. Пишут, что если больше 5,2в подать то может и сгореть
Хотя врать не буду, позже попробую
QLRS 2.11
Неправда, когда нет сиганала медленно моргает, а когда есть очень быстро. Пишут, что если больше 5,2в подать то может и сгореть
Хотя врать не буду, позже попробую
Правда. В последних версиях.
При загрузке конфигурации в прошивке 2.11 завис модуль и светится теперь постоянно, ощутимо нагреваясь.
В 2.х диод на передатчике должен светиться не мигая, когда нет связи с приёмником.
И получился бы максимально овощной аппарат. А так я могу поставить обычную липоху на 600-850mAh, чуть более злые пропы и летать как на нормальной пятерке.
Если поставить LiPo 6s, то будет не овощной.
Собрал новый дальнолет, в этот раз облегченная пятерка на цифре под 3s и 4s ионки. Рама Betafpv X-Knight 5, полётник iFlight Beast H7, моторы T-Motor F2203.5 2850kv, пропы gemfan freestyle 5226, вес без батареи 175g. Видео: раздетая caddx vista + nebula pro.
А не было бы лучше использовать те же T-Motor F2203.5 на 1500KV?
Мерять надо, под нагрузкой. И не с первого раза, а циклов через 20-30.
Ну всё, пойду мерять чужие аккумуляторы 30 раз.
Внешне очень похожи. На моих оригинальных с NKON такое же синее колечко, штрих-код, буква C.
Отлетал несколько часов на 2.11 в акро-режиме на Betaflight. Ни единого разрыва. На предыдущих версиях летал только в GPS-режимах на Ardupilot, тоже проблем не замечал. Race mode включен в Qczek LRS.
Телеметрия совершенно не нужна.
Я вообще не говорил, что телеметрия ненужна, не знаю зачем все пытаются доказать обратное. )
.😃.
Для этого есть автономный маяк или трекер. а если аккум отвалится, то приемник не передаст же телеметрию.
Если всё настроено правильно, аппаратура управления отображает на экране последние полученные координаты, что может быть полезно.
а ты учти что приёмник гораздо выше передатчика… и каким то образом приёмник с его 100мвт добивает до передатчика даже на границе связи того самого одноваттного передатчика…
То есть сверху вниз сигналу падать легче, чем карабкаться снизу вверх?
Посоветуйте, пожалуйста, оптимальный акб под 4" сборку. Чтобы и время было ~13-15минут и в маневренности не сильно потерять.
Попробуйте GNB 4S 1100 mAh 60C, они весят меньше 100 грамм.

То есть, на моей фото это разъём 2?
Да, если эти номера указаны на плате, и если моя теория верна 😃
И да, существуют какие-нибудь хорошие управляемые камеры с зумом? Типа легких беззеркалок для квадриков.
Не совсем то, но близко: rcopen.com/forum/f90/topic557728/24
Стойка жпс короткая, 7 см всего - это короче, чем у меня было раньше.
Тоже заметил, что где-то 7-8 см от Li-Ion до компаса достаточно, чтобы избежать наводок на компас.
Также заметил, что если аккумулятор Li-Ion в конфигурации 1P, а компас расположен приблизительно по центру аккумулятора, и откалиброван при установленном аккумуляторе, то работает более-менее нормально при меньшем расстоянии от Li-Ion. Проверял только с 1P.
далось вам это время висения. главное сколько километров он пролетит, эффективность вычисляется в амперах на километр, а не в минутах
Тесты в висении проводятся для того, чтобы корректно сравнивать результаты, потому как все полёты разные. А после тестов будут и полёты вдаль с амперами на километр. Если почитаете тему, они у DiscoMan а есть.
а конкретно, какие на рому поставить моторы, что бы он летал 30 минут? на роме моторы не дешевые и не плохие.
На Роме моторы мощные, тяжёлые, с относительно высоким KV. Кроме того рама тяжёлая, т.к. карбон толстый для прочности. Если хотите летать долго блинчиком, посмотрите на Roma F4 LR, Flywoo Explorer.
Мне не понятно, почему Diatone Roma летает всего 5-6 минут, по идее он должен летать 15-20 минут, из-за чего такая ужасная разница
Всё зависит от задач, от того, как хочется летать. Если быстро (гонки, фристайл), то долго не получится. Если медленно, то можно долго. Чтобы летать быстро, используют квадрокоптеры с большим запасом тяги, у них моторы мощнее и тяжелее. Чтобы лететь долго, используют наиболее лёгкие комплектующие, запас тяги небольшой, квадрокоптер висит на приблизительно 50% газа.
До сих пор не закрепил для себя, какой из выводов антенн “рабочий” у этих модемов, а какой “вспомогательный”. Напомните, пожалуйста, кто точно знает 1-й или 2-й?
По моим наблюдениям, основной разъём на модулях WiFi - тот, у которого номер больше. Нумерация бывает с нуля и с единицы.
Можно делать из стального троса в термоусдаке - антенны получаются бессмертные.
Вот! Глас обманутого народа прорезался… 😃
Я использую Ardupilot.
ну кстати зря ругаете 411.
мне удалось прошивку Inav пересобрать и в итоге
1 порт Лорка наша любимая Sbus
2 порт ЖПС
3 Soft Serial Смартаудио управление видеопередатчиком
4 Soft Serial телеметрия на Лору
Может быть, выложите кастомную прошивку и описание что куда паять? Будет полезно пострадавшим от 411 😃
надо еще этим криворуким разрабам написать, что в 4.1 версиях dshot криво работает.
Пряморукий, возьми и поправь! Исходники открыты.
Race mode влияет на дальность, т.к. данные передаются с большей частотой в ущерб помехоустойчивости.
Как мерили? Glass to glass на OpenHD? В каком разрешении?
Откуда на IMX327 матрице возьмется 300мс? Если у вас такая задержка - то проблема в чем угодно только не в самой матрице.
MIPI модуль - это всего лишь матрица. Это не камера
Veye MIPI 327 - это не матрица, это камера с процессором ISP, который обрабатывает изображение с матрицы и вносит свою задержку.
Если вы делали замеры задержки Veye 327 - поделитесь, всем будет интересно.
то и остальные ее волшебные преимущества умножаются на ноль.
А возможно делятся 😛
Если делятся, то преимущества бесконечно велики 😃
QCZEK выпустил новую версию 2.11: qczek.beyondrc.com/…/qczek-lrs-download/, special thanks to sekil.
What’s new/fixed:
Instead of using RF automatic gain control, now it’s fixed and set to max, which makes RSSI/SNR more stable
Completely redesigned frame lost/resync routine, to fix long 1-2s signal lost, which has been reported
Know problems:
For unknown reasons it’s better to set higher (like 56700 bps) serial port speed for RX module connected to FC. Maybe it’s not Qczek LRS bug, and lower speeds are not enough for high bandwidth mavlink stream.
Задержка в применении к OHD смысла не имеет
Какое категоричное заявление. To whom how, как говорится 😃
Выбор - это всегда хорошо. Интересно - берём и пробуем. Не интересно - проходим мимо.
P.S. Полетал на своей прошивке - дальность плохая - сказывается другой принцип смены частот…
Можно ExpressLRS на stm8 портануть - проблемы две - слабый проц на частоту и не подключенные пины DIO от sx127x к процу (( Но в принципе все можно))
Почему бы и не попробовать, если можно? 😉
Может быть полезно для пользователей, у которых несколько моделей на аккумуляторах с разным количеством банок.
Как подключаетесь? На какую скорость настроен GPS знаете?
К стати да, замечал, что, если скорость выше чем 38400, то могут быть проблемы. Думаю, зависит от длины и качества кабеля.
Камера должна быть с выносным сенсором, провода от сенсора до платы камеры максимально тонкие, армирование ниточкой из арамида.
Я где-то видел как передавали от сенсора картинку через несколько тонких коаксиалов, было бы идеально.Это нужно для работы с гироподвесом.
Так гораздо проще скомпоновать маленький подвес чем стабилизировать всю камеру целиком.
Согласен на счёт тонких армированных проводов, но не соглашусь на счёт компоновки. С учётом маленько размера и веса платы камеры проще стабилизировать всю камеру целиком и вести от камеры 4 провода USB тонких, армированных - любых на свой вкус, чем десяток проводов CSI.
Да, всё верно. Я плохо сформулировал. Имеющиеся на рынке CSI-камеры с ISP, IP-камеры и HDMI-камеры с конвертером HDMI-CSI вносят весьма ощутимую дополнительную задержку по сравнению с камерами CSI. Эта задержка вносит основной вклад в общую задержку линка.
Будет стабилизация - хорошо, не будет - не страшно. Ещё из хотелок можно добавить global shutter.
Судя по всему, нужна камера с USB выходом видеопотока и записью на SD карту. Сфера применения - исключительно только для OpenHD линка.
С потенциальным кругом потребителя не более, в лучшем случае, пару сотен человек. Я правильно обобщил?
В русскоязычной группе пользователей OpenHD в Телеграм - 237 человек, в англоязычной - 931. Китайцы тоже пользуются.
Отсутствие хорошей недорогой камеры - основная проблема OpenHD. Появится такая камера - число пользователей будет расти.
Так я вроде писал, что аналоговые камеры мы не делаем, только цифра.
Выше, пользователь brat002 написал, что мы изобретаем велосипед, есть камера Runcam 2 или я как то не правильно его понял.
Как тут уже не раз написали, применительно к теме данного форума есть потребность в цифровой камере для DIY цифрового линка OpenHD. Всё прочие ниши (аналоговые камеры, камеры с записью HD, готовые цифровые линки DJI и прочее) прекрасно покрываются китайскими продуктами.
Ещё раз подчеркну, что важна низкая задержка, желательно порядка 50 мс. Для самолётов и коптеров с GPS приемлемо 100-200 мс. Если задержка будет выше, то даже при всех плюшках камера будет не очень интересна.
Похоже, у Кристофа появилось свободное время. Он пытается воспроизвести проблему временного пропадания связи: www.rcgroups.com/forums/showthread.php?2837542-QCZ….