New entries

Увидел в ленте новостей. Озадачился. ПошОл читать книшки. 😁

Ну вот оно и собралось почти … Осталось обтянуть и повтыкать железки всякие .
по просьбе сообщества публикую эскиз и фото поворотного узла своего трикоптера.
Придумываю название для нового крыла, планирую сегодня-завтра закончить

Вчера на посадке завалил коптер с высоты в полметра, но умудрился сломать винт. Стал думать…
Аппарат экспериментальный - поэтому на нем не было телеметрии, а была только пищалка. Пищалка, как оказалось, была настроена на 3.3v, а не на 3.5 как я обычно делаю. На том и погорел.
На самолетах привык, что после писка на 3.3 вполне еще можно спокойно зайти на посадку и сделать лишний кружек. А тут и 14 секунд не провисел после писка. Не хватило пол метра.
Сегодня обмотал коптер соплями телеметрией и вот что вышло (см картинку)
Выходит, что у моего нано тека уже после 3.5v начинается резкий провал. Мне казалось, что у среднестатичтической липольки он начинается где-то около 3.3
Выходит, пищалка на 3.3 в моем случае - преступление. Вот так-то.
Попробую другие батарейки…
9 месяцев работ над проектом подошли к завершению. О начале проекта можно прочитать здесь.

Проект близок к завершению. Здесь, предыдущая Часть 12 - Подвес камеры. После полной сборки аппарата, я решил переделать\добавить некоторые функциональные элементы.
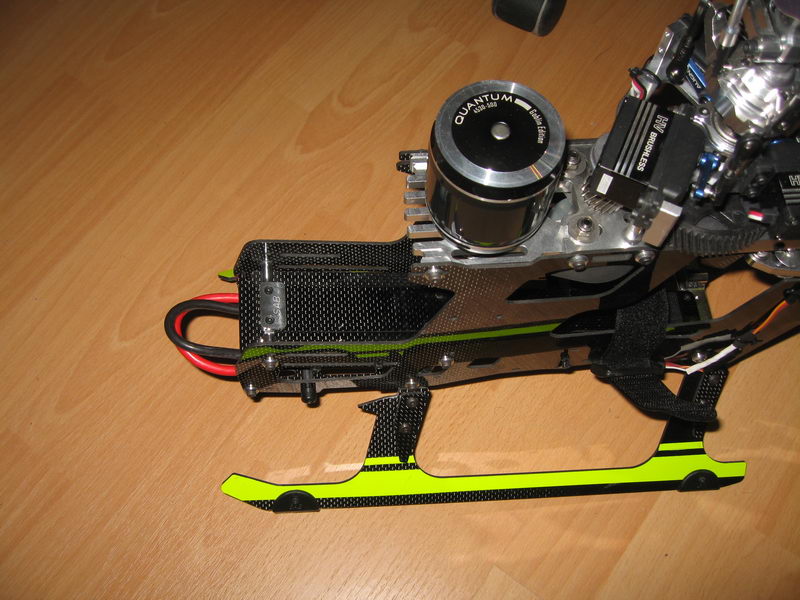
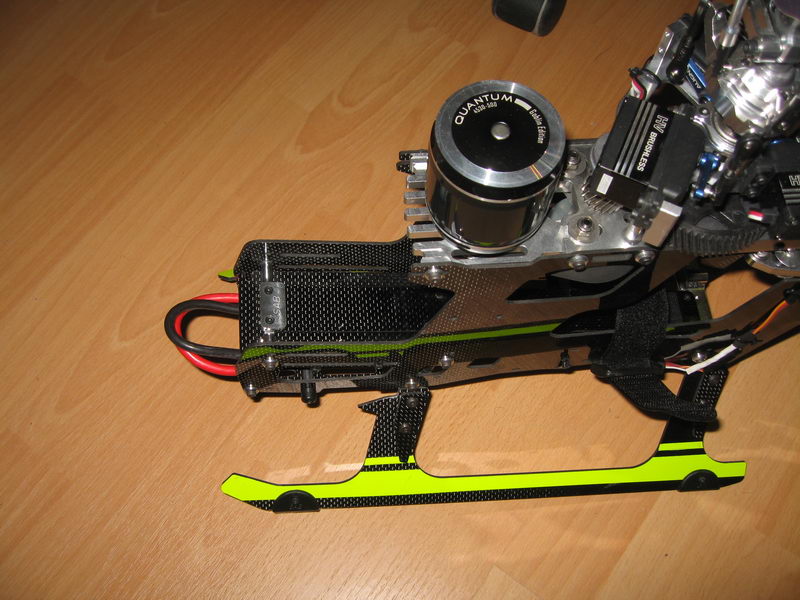
Чтобы предотвратить повреждение корпуса при взлетах\посадках, я добавил посадочные шасси. Тем более, что запас по тяге и полетному времени позволяли увеличить взлетную массу ЛА. На концах посадочных шасси я предусмотрел сменные элементы - самодельные накладки из пластика поликапролактона. При посадке на асфальт, бетон - оголенные элементы посадочных шасси будут приходить в негодность - расплющиваться, стираться, расслаиваться. Накладки из поликапролактона решат эту проблему как минимум на 2 года. После чего, с помощью фена за 15 минут можно установить новые.
Кроме того, я решил создать систему навигационных огней на мощных 3Вт светодиодах работающих в импульсном режиме, вместо светодиодной ленты.
Первым делом, я полностью разобрал аппарат, разместил два мощных 3Вт светодиодов красного и синего цветов свечения на нижней палубе ЛА. Перекрасил все детали рамы матовой черной краской ( первоначально была глянцевая краска).
Решил сделать крепление к штативу для приемника Lawmate.
Слепил из того что было под рукой - а именно, стандартный элемент крепления (идет вместе с салазками) для мобиуса.
Получилось вполне неплохо.
наскучили стандартные рамы - решил сделать что то немножко другое) пилил из того, что было, хотя оч хотелось из другого…
рама под:
винты 13, с шагом не определился
моторы AX-4008Q-620KV с хоббей (где то видел табличку тестов с разными пропами и эффективностью, если у кого есть - дайте ссылку плиз)
апм мозг - но я так и не смог побороть проблему с малым газом висения (30% например) в режиме удержания высоты постоянно вниз падает камнем. есть еще cc3d - просто в коробочке, ни разу не включался, опыта работы с ним нет - стоит ли переходить на него?..
батарея 5000 4S или все же 3S - ясно станет после тестов, но думаю 4 банки все же
регули изначально виделись афро12 из-за веса, но вопрос - не маловато ли 12А? вес 1,5 кг максимум планируется
мобиус на бк подвеса 2 оси хватит
видео tx 400mw
Что сделал с конструктором моделей:
— Исправил баг с кириллицей в названиях моделей.
— Улучшил позиционирование блока настройки горизонтального оперения, но в целом верстка далека до идеала и будет меняться.
— Исправил отображение высоты сечений консолей над горизонтом (вертикальные линии на фронтальном виде), где линия горизонта это высота самого первого сечения. Высоту отображаю до центров сечений. Скорее всего, вы не заметили, но раньше они прыгали, а теперь вот ровно стоят.
— Сделал автокоррекцию масс модели, фюзеляжа и крыла.
При изменении массы крыла или фюза пересчитывается общая масса.
При изменении общей массы пересчитывается масса фюза, а масса крыла сохраняется: этот случай рассчитан на удобство подбора догрузки модели. Отдельно массы фюзеляжа и крыла на расчеты пока не влияют, но понадобятся для будущих инструментов.
— Еще по мелочи, где-то всплывающие подсказки, где-то технические правки.
КрАЗ 260 лесовоз, Газ 66
Масштаб 1:10

“Мы сделаем совершенно новый передатчик, он появится в продаже к концу мая 2014…”. Так мне написали из Мультиплекса в начале декабря 2013.
Я терпеливо ждал мая…
Я терпеливо его дождался…
И что я вижу?
Вот так выглядел предыдущий Рояль.
Длина: 1600
Размах: 1260
Вес: 3120
ПАК: 6S 6000 25-50С Нанотех
СУ: EDF 90X2
Время полёта: 6-8 минут в смешанном цикле, 3,5-5 минут в максимально “висячем” полёте с большой мощностью на больших углах атаки, до 17 минут в режиме “релакс”.
И заодно потестил вертушку и виброразвязку. Когда рама жесткая, никаких проблем с желе даже на битых моторах и коцаных пропах. И еще, для самостоятельных съемок хедтрекер - вещь!
Клип про девушку, которую что-то заставило бежать…
Надоел соосник или старенький 120SR? Хотите его выбросить или продать? Зря! Вы просто не умеете его готовить. 😉
Вот подборка «плоского» пилотажа F3C из всех спортивных кодексов FAI с 2006 по 2014 годы.
Учитесь летать! Особенно налегайте на тайминговые маневры с пируэтом (контролируемые перемещения с постоянным вращением вертолета вокруг оси ротора). Эти навыки Вам и на классике ой как понадобятся!
Удачных полетов! 😃
кто знает как делать и насколько выгодно,пишите кароч в коменты
Ну вот и собран новый Скай с телеметрией SwiftAI Next Generation.
Облёт прошёл успешно - ничего не разбил.
Но что то плохо работает воздушный спидометр, поэтому автономный полёт не выходил
В этой статье собраны варианты решения часто возникающих проблем, рекомендации по ремонту, настройке и эксплуатации вертолета WLtoys V922.
1. Первое включение
После включения на вертолете должна инициализироваться система FBL. Чтобы инициализация прошла корректно, после подключения аккумулятора сразу же поставьте вертолет на ровную поверхность.
=> Если при попытке взлететь вертолет стремится завалиться на бок, перевключите вертолет и поместите его на ровную поверхность.
Инициализация вертолета проявляется дерганием всех трех сервомашинок одновременно в небольшом диапазоне. На протяжении полета сервы будут слегка двигаться.
=> Внимание! При первом включении рекомендуется проверить, как движутся сервы. Их движение должно быть плавным, без рывков. Если сервы движутся неравномерно, с резкими рывками, нужно перебиндить (заново привязать) вертолет к пульту.
Кто-то готовится завтра полетать 😃

На икаре испытывается/настраивается стабилизация, серое крыло (недоделанное и без имени) доделывается, старое крыло “из первых” возвращено из гаража и доведено до готовности для полетов - нашелся “сочувствующий” сосед из соседнего подьезда, ходим запускать самолеты мои (я запускаю, он смотрит), думаю дать ему порулить - помнится, что летало крыло аки пони бегает, так что страшного ничего не должно случится (а если и случится - чем доживать век в гараже уж лучше так, в полете)
В продолжение записи rcopen.com/blogs/61940/18411
Май 2014. С наступлением тепла и увеличением светового дня стал летать больше и чаще. Только на этой неделе летал 4 раза. Теперь спокойно можно выбраться после работы или вместо нее 😃
Ко всему вышеперечисленному, только в заметно более уверенном исполнении, добавились относительно уверенные полеты в инверте.
Пока это восьмерки, круги носом вперед и воронки хвостом вниз в инверте в одну сторону.
Очень важно летать с опытными товарищами, готовыми дать совет, разобрать ошибки и подсказать над чем работать. За что отдельное спасибо Николаю.😎
А еще важно не зацикливаться на идеальном исполнении чего-то и не бояться переходить на более сложное. Техника придет с налетом. И гораздо быстрее она нарабатывается при освоении новых фигур.
Читаю скучные дневники про коптеры, они и вправду скучные. Но мы не привыкли грустить и вот вам моя конструкция…Повеселился сегодня…
void setup()
{
delay(2000); // на всякий случай
Serial.begin(115200); // для первого запуска, для последуюших запусков будет другая, т.к. “AT+BAUD8” меняет скорость на 115200, “AT+BAUD7” 57600
delay(2000);
Serial.print(“AT”);
delay(2000);
Serial.print(“AT+VERSION”);
delay(2000);
Serial.print(“AT+NAMESystem”); // вместо “Wii” можешь придумать свое имя модуля
delay(2000);
Serial.print(“AT+PIN0000”); // вместо “0000” можешь придумать свой пин-код
delay(2000);
Тихим сапом квадрик пережил апгрейд до карбоновых 12мм трубок. Плюс печатаются другие ништяки - GPS посадил в коробочку.
Туда же планировался и компас. Но после того как сделал калибровку компаса оффсеты вылезли больше 100. Видно влияет ионистор и другие намагниченные части GPSa. Где то читал что можно размагнитить. Но пока что вынес на нейлоновых стойках. После этого оффсеты получились в пределах 50. Также обзавелся складывающей стойкой для компаса и GPSa с Китая.
Напечатаны маунты для движков.
Немного об МХ16. Понадобилось мне настроить данную апу для металки, первое с чем столкнулся это не фиксируемый выкл. под правую руку, а мне надо под левую, значит быстро меняем местами, но тут есть подводные камни Я думал что все как в МС20, открыл, разъемчики выдернул и все, а нет, здесь выключатель на платку напаен и что бы эту платку снять надо снять джойстик, а для этого почти всю апу развинтить Снял я эту платку с двумя выключателями, отпаял нужный и думаю, а не взять ли мне из запасов не фиксируемый, когда то по случаю прикупил разных граупнеровских для мс20, пусть будут с двух сторон. Но столкнулся с проблемой, гайки которые крепят выкл. имееют разную форму, думал это дизайн такой, а оказалось, что и резьбы имеют разный шаг, я в шоке. Короче пришлось и вторую платку снимать и менять местами эти выключатели.
Теперь о настройке, как известно в металке нужно 4 полетных режима, а в мх16 их всего 3. Я поступил так:
1 режим “старт/ takeoff”, его ставим на не фиксируемый выкл. В меню phase trim элероны не трогаем и элеватор немного поднимаем вверх.
2 режим “speed”, его я поставил на sw4 (трех позиционник, среднее положение “normal”, в меню phase trim элероны немного поднимаем, элеватор не трогаем.
3 режим “thermal”, его я поставил на sw5, в меню phase trim элероны немного вниз, элеватор по месту после облета, можно и не трогать для начала.
захотелось вдруг чего то летательного полукопийно-копийного, с хорошими такими размерами метра под два, чтоб ветром не колбасило почём зря…
поразмыслив и полазив по тырнету выбрал прототипчик, (какой пока оставлю в секрете) просто приведу описание: Низкоплан, с развитой взлётно посадочной механизацией, лёгкий Транспортно-связной самолёт времён окончания Второй Мировой, рядный четырёх цилиндровый двигатель, не убираемое шасси с хвостовым колесом, пару подкосов 😎…
Заложил в матрицу сердечник . Один слой стекла 200 го . По кромкам сердечника пустил еще один слой шириной 15 мм ну чтоб ударо-прочность повысить . В паз в сердечнике натолкал каши и пенал стеклопластиковый. Пропитывал смолой прямо в матрице. Лишнее отжал бумажным полотенцем (перестарался местами в итоге мелкие раковины). Корневую полунервюру из 3 мм бальзы вырезал и еще кусочек нервюры на другом конце пенала … ну чтоб все ровно было 😃 . И вот сегодня с утра оно вылупилось:) Матрица разседенилась очень легко .
Не думал не гадал, что буду дневник писать. Да тщеславие перебороло скромность…
Решил сделать хорошую экстру, да еще и осветить этоот процесс
Нашел 3D модельку в SolidWorks, но так как в солиде не умею, буду препарировать в AutoCAD.
Что имеем: размах 1200, крыло профильное цельное съемное.
Мотоустановка: пока не думал, но есть двигатель Turnigy D3530/14 1100kv. Если по факту по весу не подойдет - будем думать.
Из чего имеем: потолочка, фанера, линейки, может быть бальза.
С фонарем и капотом пока не ясно как и что делать. Деревянная болванка и бутылка, скорее всего.
В каде начал немного разбираться, сечь и т.п.
Ссылка на dwg кому интересно, AutoCAD 2014 drive.google.com/file/d/…/edit?usp=sharing
Ну вот и у нас обновка. Первая нормальная резка.
С горем пополам и божей матерью она заработала.
Осталось чуток доработать, собрать всё в кучку, изучить проги и вперёд.
ТТХ модели - Линкор “ПЕТРОПАВЛОВСК”: Длина, мм - 1080 Высота, мм - 330 Снаряженная масса, кг - 5 Двигатели, шт - 4 Гребные винты, шт - 4 Радиоуправление Turnigy9x - обеспечивает: 1. движение вперёд - 2 скорости 2. движение назад - 1 скорость 3. управление рулём 4. вращение передней орудийной башни 5. вращение задней орудийной башни 6. управление освещения 5-и прожекторов 7. стрельба из передней орудийной башни
Вот он и полетел наконец то! Летит хорошо, смотрится интересно))) Фото и видео событий прилагаются:

Это сокращенная версия статьи. Полная версия тут
Коллеги, помогите советом!
IMU включил с переполюсовкой - в итоге походу сжег - видимых повреждений нет но пишет что “нет сенсора” и сыпятся ошибки по i2c
Одним из приятных / полезных отличий версии компетишн является более высокая рама и измененная хвостовая балка, что позволяет при небольшой модификации загружать акки через зад, не снимая канопы.
Для этого нужно:
- Сначала надо перекрутить упор под батарейный трей со штатного места сзади вперед.
- С помощью комплектной термоусадки и накладок на батареи сделать сборку 12S. Пригодится небольшой удлинитель
Продолжаем сборку:

kasmirov.ru/img/20140513_0022.jpg (269 Kb)
Чуть более полугода назад собрал Гоблинца 700-го, который компетитион.
В процессе сборки сделал много фоток, хотел еще тогда отчет сделать. Но не дошли руки.
Тогда компетишн был новинкой, а сейчас они почти у каждого. Но может кому-то пригодится мой опыт эксплуатации.
Поэтому сборку комментировать особенно не буду, скажу только что собиралось все довольно просто, по инструкции. Ничего допиливать не пришлось.
Единственное были мелкие огрехи в виде винтов не той длины или невложенного батарейного упора, кстати не одному мне.
Но это все мелочи. Собиралось все нормально, но мудреность конструкции и некоторые технологические решения чуть подрастянули сборку по сравнению с Align 700DFC, который собирался не в пример проще и быстрее.
Краткое содержание:
-
фотоотчет о сборке.
-
апгрейд №1 - смена паков, не снимая канопы
-
апгрейд №2 - усиленная рама и шаськи
-
апгрейд №3 - электроника
-
фотоотчет о сборке (все фотки кликабельны в лучшем разрешении)
Клуб находится в здании бывшей школы, помещения около 300 кв.м. Занимаются спортсмены (кто чем захочет) и дети около 60 человек, начинают с радиоуправляемых моделей полуфабрикатов (наборы, киты), на третий год обучения выбирают класс модели.
Оборудование: большой и маленький распиловочные станки (“Хюндай” и “Пракссон”), Ленточная пила и электролобзик “Пракссон”, большая и 3 малые ленточно-шлифовальных станка. Металлообрабатывающие большие фрезерный и прицезионный токарный станки пр-ва Швеции. 3 сверлильных станка, много электроинструмента. 4 компьютера для тренировок на симуляторах, 2 3D-принтера. Сами сделали ЧПУ пенорезку и 2 3D-фрезеровальных станка для изготовления оснастки (большой) и деталей (малый).
Члены клуба успешно выступают на соревнованиях, на базе клуба 2 раза проводились Чемпионаты Мира по свободнолетающим моделям (F1) и по радиоуправляемым планерам F-3J. Сейчас начали строить поликоптеры, для армии и исследовательских учреждений.
Работает клуб по вечерам, ежедневно. У взрослых свои ключи от всех помещений доступ в любое время. Полеты каждую субботу и иногда по пятницам. Ниже немного фотографий.
Клуб находится в здании бывшей школы, помещения около 300 кв.м. Занимаются спортсмены (кто чем захочет) и дети около 60 человек, начинают с радиоуправляемых моделей полуфабрикатов (наборы, киты), на третий год обучения выбирают класс модели.
Оборудование: большой и маленький распиловочные станки (“Хюндай” и “Пракссон”), Ленточная пила и электролобзик “Пракссон”, большая и 3 малые ленточно-шлифовальных станка. Металлообрабатывающие большие фрезерный и прицезионный токарный станки пр-ва Швеции. 3 сверлильных станка, много электроинструмента. 4 компьютера для тренировок на симуляторах, 2 3D-принтера. Сами сделали ЧПУ пенорезку и 2 3D-фрезеровальных станка для изготовления оснастки (большой) и деталей (малый).
Члены клуба успешно выступают на соревнованиях, на базе клуба 2 раза проводились Чемпионаты Мира по свободнолетающим моделям (F1) и по радиоуправляемым планерам F-3J. Сейчас начали строить поликоптеры, для армии и исследовательских учреждений.
Работает клуб по вечерам, ежедневно. У взрослых свои ключи от всех помещений доступ в любое время. Полеты каждую субботу и иногда по пятницам. Ниже немного фотографий.
Вот и я взялся за повторение этой интересной рамы… отслеживать этапы проектирования можно будет по фото.
Как закончу и соберу первый образец, выложу чертежи.

Дорисовал немного раму, и порезал некоторые детальки…
В конструкторе моделей http://aerodiagra.ru/constructor/ теперь работает функция отмены.
Отменить действие: Ctrl + Z
Вернуть отмененное: Shift + Ctrl + Z.
Или ссылочками вверху.
Вчера улетался вечером в сумерках с крылом с подсветкой включенной, ну детворе веселье то понятно, а себе понял, что мне кое чего от подсветки не хватает, когда уже и не темнота, но сумерки, то иногда самолет терялся
Потому решил аБгрейдить подсветку, тем более что поставил внутрь другой приемник (frsky… 9xr все таки как пульт намного удобнее), он более мелкий, так что немного места образовалось
В это лишнее место готов запихнуть контроллер подсветки, раздумывал, что он должен делать, пока вот себе ТЗ набросал
Причем особо даже ничего не буду паять - возьму старую поделку свою новогоднюю
Решили семьей 9 мая посмотреть не только парад, но и поучаствовать в нем.
Главным лозунгом было: “Никто не забыт, ничто не забыто”.
Люди с утра начали собираться у намеченного места организаторами.

Покатался сегодня на ультралёгком Икарусе. В смысле, на на венгерском автобусе а на немецком самолёте. en.wikipedia.org/wiki/Ikarus_C42
Несмотря на порывистый ветер, большой болтанки не было. На старте боковичёк турбулентный слегка боком поставил. Пару раз получили под зад термиком, что альтиметр до 3м/с показывал. А так просто красота.
Снизу Google Maps,


Похоже погодка на этой неделе будет только радовать )
Всем удачных полетов!
Нашел наконец канцтовары с ламинатором, купил 3 листика А4, 100 мкм толщиной (толстая пленка есть - ну чтоб документы ж на века, а тонкой нету), заламинировал крыло бихлеру (не все, а только переднюю кромку)
На все крыло потратил 1 листик (ну он двойной, так что наверное правильно говорить, что все таки 2)

ОТфрезеровал сердечник . Надо будет еще заложить в него трубу под штырь. Лонжеронов не будет … Считаю нет необходимости в них . Обшивка то несущая получится ( ну должна быть 😃 )
Вот и собрал подвес для моего дисколета!
Наконец-то склеил видео. Стоило больших трудов (часа 4 в общей сложности). В общем смотрите, оценивайте. буду рад любой критике:)
По моим наблюдениям улеты коптеров случаются по трем основным причинам:
- Неадекватное поведение полетного контроллера
- Зависание приемника РУ
- Не настроенный или неправильно настроенный фейлсейф.
Что касается первого пункта, то, как показывает анализ опыта других коптероводов, столкнуться с неадекватным поведением можно практически на любом контроллере из используемых в настоящее время. У одних это происходит чаще, у других реже, но, пожалуй, ни один полетный контроллер не вызывает в подобных случаях столько негатива, сколько вызывает DJI NAZA 😃 В принципе, тут все понятно - низкий порог вхождения. Чтобы настроить какой-нибудь МультиВий, надо убить не один час. С назой многие поступают просто - воткнул, полетел 😃 В этой простоте и кроются всяческие соблазны, которые, в свою очередь, приводят к улету и крэшам коптеров 😃
Итак пришел финал моего первого матричного опыта - пришел конец первой моей матрице! 😎
Успел сделать 2 винта, совершенно нормальных с точки зрения поверхностей, жесткостей и проч параметров. Матрица получила повреждения в районе выпила канала на торце лопасти, и из-за заливки нижней части смолой+микросферой был длинный скол у передней кромки(вылечил) после первого съема.
Итог: получил то что хотел - пару винтов и богатый опыт. Теперь буду делать новую матрицу заливного типа в выфрезерованной толстой фанере(очень частая конструкция)+стальные рамки жесткости по краям для предотвращения круток.
