New entries

Выбрал нервюры для центральной части крыла без сужений профиль MH 64 хорда 250мм.
Профиль для стаб.поверхностей NACA0009 с сужением хорды от 250 до 100мм.
Центральная часть крыла будет с одним лонжероном коробчатого вида, две сосновые рейки 10х4 между нервюрами будут вклеены полоски бальзы 2мм.
Лобик пока под вопросом как делать, выбираю из вариантов:
- Увеличить частоту нервюр через каждые 25мм до лонжерона.
- Заполнить пенопластом и зашкурить под профиль до лонжерона.
- Зашить бальзой 1мм до лонжерона.
Набросал в SketchUp центральное крыло + шайбы + схематично стаб.поверхности пока без элевонов. Можно полюбоваться в 3D 3D эскиз
Первая запись в дневнике.
Есть задумка сделать летающее крыло с 2х осевым подвесом. С нагрузкой на крыло 40г/дм2 из бальзы, размах выходит за 2,25м удлинение крыла 10.5 и вес 2000г (скорее всего будет тяжелее).
Полезная нагрузка выходит уже 1250г.
Двигатель 35-36 1400kv,винт 10x5 или 9x6 180
Регулятор 60A 74
Сервы 2шт MG996R, тяги, кабанчики 150
FPV перед+OSD+GPS+провода+антенна 102
FPV камера 1 курсовая 44
Камера 2 в подвесe Runcam2 90
Подвес 2х осевой 210
Питание двигателя 2200 40С 200
Питание FPV 1450 25С 100
Питание подвеса 1450 25С 100
Если кого интересуют радиоуправляемые метательные планера F3K.
17-го июня (в ближайшую субботу) пройдут соревнования в Дубне!
rcopen.com/forum/f37/topic491590/54
Вот положение…
f3k.su/…/Положение-Кубок-СУ-3-этап-Дубна.pdf
А вот форма регистрации…
docs.google.com/forms/d/e/…/viewform
Народ начнёт подтягиваться на поле с пятницы и часов с трёх дня можно будет подъехать 7а поле, пообщатьсяь с пилотами поглазеть позадавать вопросы, а может быть даже попробовать порулить (если есть мало- мальские навыки управления RC моделью. Во время соревнований, это не получится…
А вот и зарегистрировавшиеся пилоты…
docs.google.com/spreadsheets/d/…/pubhtml
Как выглядят эти соревнования можно посмотреть на замечательном видео от Сергея Семерикова…
дотянулся до звёзд…
Привествую всех любителей строительства мультикоптеров!
Продолжаю тему строительства компактного и функционального квадрика. За последнее время нарисовал и пильнул центральную часть:
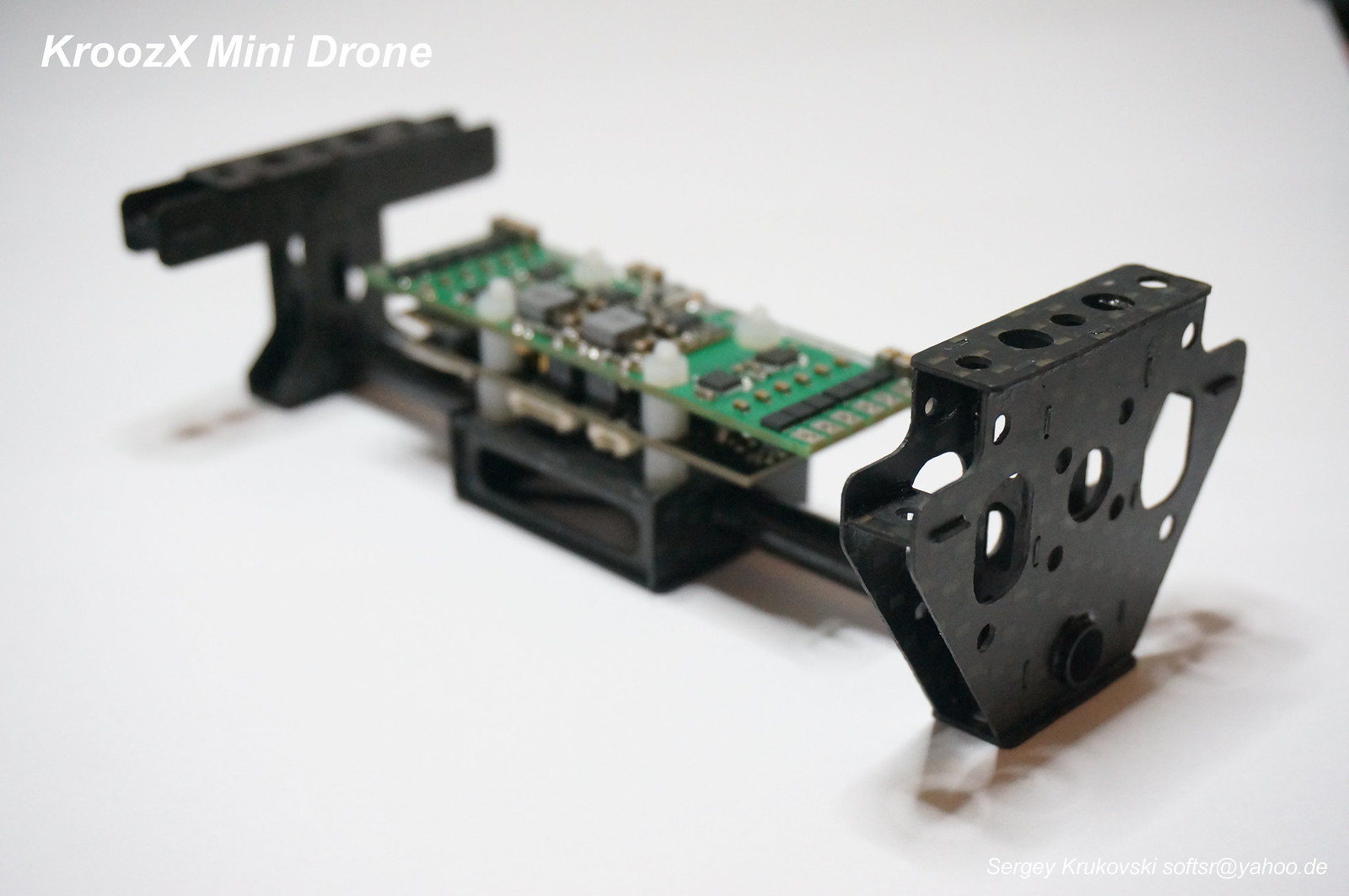
На эту центральную часть, или тушку, будет крепиться почти все навесное оборудование. На фото показано крепление моего KroozX полетника.
Парк Коломенское, 10.06.2017.
Два коптера (Мавик и Фантом) летают и маневрируют над людьми (на высотах от 3 до 30 метров)!
Абсент, июнь 2016г.

Балансируемся по “взрослому”!!!
Просто, точно, доступно.
Подходит почти для всех вертолетов. Я и 600ку так же отстроил. 😉
Все собирался добавить познавательную инфу про реальное влияние центровки на вертолет Ми-8МТ, да времени не хватало.
ПРАКТИЧЕСКАЯ АЭРОДИНАМИКА ВЕРТОЛЕТА МИ-8МТ, (Учебно-методическое пособие 2006г.)
На вертолете Ми-8МТ изменение центровки на 100мм изменяет угол тангажа на 1 градус практически во всем диапазоне скоростей полета.
Это на 11ти тонной машине с винтом диаметром больше 21го метра!!! 😉
Денис выдвинул дельное предложение, комплектовать Абсент двумя обтекателями-крышками кокпита.
Сие расширяет номенклатуру батарей.
Расплатой: бОльшее сечение фюза в фас и как следствие - большее лобовое сопротивление.
Что было предложено:

Оригинальный кокпит выглядит так (на фото позитивный оттиск с формы крышки):
«Росэлектроника» показала, как будут ловить дроны в России.
Компания «Росэлектроника» сообщила сегодня о завершении разработки комплекса скрытого обнаружения движущихся воздушных, наземных и надводных целей. Разработка может использоваться в охране важных стационарных объектов, а также как элемент динамической защиты.
Многие начальники всегда тыкают своим талантливым инженерам мысль, что все устройства и юзабельность должны быть с защитой от дурака. Типа это фишка и должно все работать на УРА!!!
Давайте посмотрим какой следующий шаг потребителей всего этого:
В контакт-центр банка позвонила барышня и сообщила, что её кредитку «забрал» банкомат. Я определил какое именно устройство, но выяснилось, что оно отключено. Объясняю даме, что ридер для карт заблокирован прочной шторой из металла, которую не так просто поднять. Поэтому этот терминал никак не мог «съесть» карту.
— Да, всё именно так. Когда у меня не получилось вставить карту, я засунула её в тот проём, откуда обычно купюры вылазят.
— Презентер тоже должен быть заблокирован.— Я знаю! Я пилочкой для ногтей его открыла!
занавес
На новом сайте планируется сделать специальный аккаунт для всяких системных уведомлений. Помогите придумать ник, который бы одинаково хорошо воспринимался и на русском и на английском языке.
Пока в голову пришел только autopilot, но он слегка занят и отбирать не хочется 😃. “system” как-то уныло выглядит, не нравится.
Искал чертежи для своего первого самолёта. Хотел найти самолёт построенный по принципу летающее крыло и соответственно искал модели типа «Вжик», «Мантра». И, тут на сайте классных ребят из США Флайтест (Flite Test) нашёл модель истребителя Пятого поколения Ф-22 Раптор (FT-22 RAPTOR), посмотрел видео постройки и понял – это мой вариант!
10 дней сборки от начала, до готовой модели и он готов. Учитывая, что это мой первый опыт постройки самолёта и то, что мне приходилось делать его в основном с 11 вечера до 4 утра, я считаю здорово.
С самого начала была идея посвятить самолёт старому мультику из 80-х Трансформеры, точнее одному из персонажей Старскриму, он же Скандалист, он же Starscream. Некое моё виденье, какой бы был из Старскрим из Поколения 1 в обличие Ф-22 Майкла Бэйя.
Проект получил название F-22 Starscream G1.
Благодарю ребят из Флайтест за возможность скачать годные чертежи ФТ-22! 😃
Вот тут: www.flitetest.com/articles/ft-22-raptor-build
В помощь тем - у кого есть интерес летать по точкам (авто-миссия) на АПМ.2.6 версии 3.2.1 .
Хочу поделиться информацией о тестировании
Пару лет назад заинтересовался постройкой дрона, способного летать в полном автомате. съемка в друднодоступных местах, или в окружении объектов, создающих помехи радиосигналам.
Преимущества, - возможность производить полет, практически из любого места, хоть посреди леса, при наличии миссион планнера и карты местности.
Дальность полетов ограничена только батареей.
Записал для памяти
Столкнулся с коптером товарища и победил!
Внезапным выпадом подставил ему под винт свой мотор, лопасть винта другого коптера отлетела, мотор потерял тягу и коптер упал на луч этого мотора, луч сломался и освобожденный и непокоренный мотор второй лопастью винта вмиг отсек торчащие усы антенн приемника, избавившись враз от контроля над собой! 😁
Все это я, конечно, не специально. 😒
www.youtube.com/watch?v=88o8PRb5U3o
P.S. Это не первое мое столкновение 😉
Реальный ахтунг! Таран Изистара Твином (FPV)
Креш ТвинСтара в Изика
FPV ролик с альтернативными концовками
Привет всем любителям ̶т̶у̶р̶б̶о̶р̶е̶а̶к̶т̶и̶в̶н̶о̶й̶ ̶т̶я̶г̶и̶ строительства мультикоптеров! 😃
За весьма длительное время занятия этим делом было построено много различных вариантов аппаратов. Хотя на большинстве из них я использовал свою собственную разработку съемных лучей:

В прошлогоднем обзоре (ссылка) я подробно рассказывал о начинке и тестах железа. Недавно мы слегка обновили железо и софт, о чем я и хотел рассказать чуть подробнее.

Беглое сравнение:
начинка:
motor- Turnigy SK3 Fandrive - 3659-1900kv
ESC- HobbyKing™ SS Series 190-200A ESC (water cooling)
Turnigy 5A (8-26v) SBEC for Lipo
Lipo- Turnigy 5000mAh 4S1P 14.8v 20C
скорость 54км на 4s вот с таким винтом hobbyking.com/…/4-76mm-adjustable-stringer-kit-w-4…
Выкатил на демо-сайт поддержку истории изменений для постов. Она будет публичная. Смысл в том, чтобы меньше ограничивать редактирование сообщений, но при этом не запутаться кто чего говорил и говорил ли вообще 😃 .
С текущего форума историю изменений импортировать не планируется, чтобы никого не спалить 😃
Не думаю, что было бы хорошей идеей разрешить редактировать вообще всё. Но например увеличить период редактирования до недели у первого поста топика и до суток у остальных кажется разумным. Пока еще не продумывал в деталях, на чем остановиться.
Начну пожалуй свой дневник вот с такого проекта.
На работе начальник собрал (почти) такого зверя. Идея была такова, чтобы управлять коптером не за счет оборотов моторов, а отклонять их попарно. Хотя, как мне кажется, всё равно необходимо изменять скорость вращения винтов на рабочей паре двигателей при маневрировании.
Колхоз конечно знатный. Надо приводить в порядок.
Тут жаловались, что самое неудобное в работе с A7105 - это подпаиваться к ней - стандартные платки штампуют с шагом контактов 2мм, что не очень удобно. Решил немного исправить ситуацию, заодно добавил совместимость с NRF24L01, платой Rainbow RX и переходником SPI-I2C, который я планирую использовать в беспроводном джойстике для FPV Freerider. Вышло немного толстовато, но как для тестов пока сойдет, следующие будут тоньше.
##########
Проверил сегодня на дальность. Аппаратура FS-TH9X с модулем FS-RM002, приемник на макетке с Arduino pro mini и Bluetooth для передачи на смартфон. Failsafe настроен на 600мс. После удаления от передатчика на 350 метров приемник выдал первый failsafe (полетник должен это проглотить и выдать последние значения), на удалении 500 метров получил двойной failsafe (это задержка больше секунды и должен включиться stage 2 полетника). Результатом доволен, это как минимум в два раза дальше чем на NRF24L01. Хотел отломать антенну на плате и припаять внешнюю, но пока оставлю как есть.
Часик полетал на закате в госпитале. Пока страшновато дайвить, да и деревья внизу. Поймал FailSafe в 50 метрах над собой, что странно для FRSKY FASST Diversity приемника…
[Update] Причина FailSafe скорее всего была в отломанном экране антенны передатчика.
Темной ночью, незаметно… подкрутил правила. В общем, по сути ничего не поменялось. Кусок про персональные данные уехал в отдельную главу. Добавились заключительные положения, слова про смену домена и чего-то там про куки.
Кому надо - смотрите 2 последние главы. Изменения сделаны чтобы идти в ногу со временем (а точнее, с нашими дебильными законами). Для людей все остается без изменений.
После переезда более капитально все перелопачу, типа “новый сайт - новые правила”. А пока менял по минимуму, чтобы никого не путать лишний раз.
Если что-то непонятно или вопросы - пишите, отвечу.
Собрал 210мм коптер на Omnibus F4 под BetaFlight 3.1.7.
Пока настроил немного ПИДы (не идеально, есть еще propwash вибрации иногда), но это по-любому на порядки лучше чем мой любой предыдущий коптер.
Вот пара коротких роликов с закатных полетушек:
Чище легче и меньше. Так можно назвать новую переделку старого-нового коптера.
 IMG_4290 by Alexey Degterev, on Flickr
IMG_4290 by Alexey Degterev, on Flickr
Приступаю к модернизации RainbowRX. Задача перейти с NRF24 на A7105. Рассчитываю увеличить дальность у добавить совместимость с аппаратурой FlySky.
Для тестов аппаратура FlySky TH-9X с родной прошивкой, Arduino pro mini 3.3v 8MHz, радиомодуль A7105.
На макетке приемник заработал, сыпет в ком-порт все 8 каналов. Пытаюсь на Arduino micro сэмулировать джойстик, используя PPM c pro mini: работает, но идет помеха по всем каналам. В jstest видно как на разные каналы на фоне правильно высчитанных значений несколько раз в секунду выдаются произвольные числа. Пару кругов в FPV Freerider пролететь можно, а вот посадить практически нереально. Менял значения PULSE_WIDTH, переписывал stickValue - не помогло.
Подключил к Naze32 - действительно шумный PPM. С NRF24 помогало разнести приемник с контроллером, попробую отодвинуть или заэкранировать атмегу. PPM генерится проверенным кодом, только на другой ноге, может в этом дело.
################
Решил проблему с помехой, взял код приемника отсюда и убрал не нужные мне отдельные выходы для сервомашинок, оставив только PPM. Для FPV Freerider вполне играбельно получилось.
По просьбе пилотов.
Шаблон, позволяющий точно выставить ноли на крыле Абсента (концевая нервюра центроплана, она же корневая для уха).

В архиве чертежики в IGES, DXF, SLDPRT, JPEG.
Скачать архив.
И да пребудет с вами подъёмная сила!
Сия коллеги!
Удивил приемник , с пульта идем 70мв и стоит перепаянный китайский патчик.
dev.rcopen.com/contacts (залогиненым показывается на 2 ссылки больше)
По сравнению в нынешним сайтом - сократилось количество форм и подрихтовались формулировки. Ну и внешний вид позадорнее.
Продолжаем разгребать мелочи, перед тем как приступить к “крупняку”. Из крупняка висят блоги-клубы-барахолка, но там с форума под копирку почти все фигачится.
Приехал на работу. За две недели с хвостиком ни-че-го не изменилось.
Задумался об отпуске.
В задумчивости, обнаружил на столе посылку - коллеги получили. В посылке индикаторы.
Совместил нужное с познавательным - отфрезеровал нивелир для шпинделя.

Калибровки:
-
Калибровка R и P (гиросенсора).
Ставим квадрик на строго горизонтальную поверхность. Левый стик до упора вправо, правый раскачиваем влево-вправо пока все четыре
колпака не загорятся жёлтым. После этого R и P сбрасывается в ноль. Проверяем, поворачивая квадрик на 90 градусов “след в след”.
В каждом из четырёх положений показания R и P должны быть по нулям. Если нет, то перекалибровываем на более горизонтальной
поверхности. -
Калибровка акселерометра. Эта калибровка в основном нацелена точность позиционирования поворотов по yaw.
Т.е. если дрон летит боком или унитазит, то следует тщательно сделать эту калибровку. Я её делаю на офисном вращающемся
стуле. Устанавливаю дрона геометрическим центром в центр вращения стула. Далее левый стик до упора вверх, правый
раскачиваем вверх-вниз пока не загорятся жёлтым колпаки. Далее ждём пока не начнут бегать по кругу красные огни.
плавно вращаем дрона на стуле пока все колпаки не станут зелёными. После этого останавливаем вращение и пока
Симптомы: Output voltage too high при попытке зарядить 2S. Затем прибавилось нежелание разряжать током более 2А при аццком перегреве. А потом и 3S перестал заряжать.
Лечение: замена транзисторов в круг.
Маркировка слева-направо: IRFB4110, IRF3710, MBR30100CT, IRF3710, IRFB4110, MBR30100CT, IRF4905, IRF3205.
Почему эта статья
В моей статье я не претендую на переворот и новое слово в коптеростроении. Скорее здесь собрана выжимка из моего опыта, других статей, сообщений форумов и обсуждений с различными людьми. Она может использоваться как старт в понимании многих проблем, связанных с коптерами, и их возможных решений, но не как последняя истина. Если меня хороший знакомый спросит, как собрать коптер, я в первую очередь дам ему почитать это.
Что нужно для мультикоптера
Хочу собрать мультикоптер для FPV. Не купить набор, а подобрать компоненты сам, чтобы не дорого, сердито и интересно.
Конфигурацию буду стараться подбирать так, чтобы летать довольно долго (в отличие от целей “быстро” или “маневренно”) - надо выбрать раму, вес, тягу, емкость аккумулятора. Отзывчивость и резкость не очень важны, в отличие от стабильности в ветреную погоду.
Сначала я хочу собрать и отладить коптер, а прикручивание к нему FPV отложу на потом. Сложностей и затрат хватает и так.
Настиг меня в конце апреля краш и и захотелось душе чего-то более компактного и легкого под пропы около 10" и минут 15 полетного времени с трехосевым подвесом и второй ксюхой. В итоге перепробовал множество вариантов размещения ВМГ, как 2216, так и 3506. В итоге все-таки остановился на 3506 с 11 пропами. В итоге получил все тот-же “утюг” 1170 грамм(без акка), что был раньше (в альбоме остались фотки). Но с одним преимуществом - можно ставить любые по массе акки - коптер почти уравновешен без источника питания. Раньше, подвешенного за самый хвост 5200 3S не хватало. Есть в этой компоновке и недочет - Наза стоит на 40мм дальше ЦТ, что несколько расходится с рекомендациями производителя. Но на полет никак не сказывается - коптер под съемку, летает на 30% расходах.
Оно самое. Чтобы токи былы ухх! А вес, ну просто ахх.
Как у того ёжика. Сильного, но лёгкого 😃)
Значится так.
Берём вот такие батарейки.
Где берём? В ящике.
А ящик откель?
С хобей. Евросклад …
Ну, эт лирика.
Значится берём батарейки.
Довольно интересное место, но после дождя ой как тяжко будет проехать
Прикрутил чпу для своего токарного станка
Ramp 1.4 в качестве електроники
Repetier Host как хост
Генератор g-code - пока ручками
Ничего не сверлил - атачмент устанавливается и держится на крутилках
Облетали планер 2,2 м размах. Взлетный вес 1600 гр с батареей 5000 3s. Планируем установить фпв оборудование и освоить парение по камере. Крыло не разборное - одним куском. (Совет Владимира Худякова)

Устройство вроде простое и маленькое, но написание программы это цела песня. Точнее “взрыв мозга” на пару - тройку дней. Сейчас уверенно можно сказать - задача выполнена.
И что же мы имеем?
Проанализировав отзывы о других девайсах пришлось очень тщательно подойти к вопросам формирования сигналов управления. Вопросы совместимости с разными приемниками, установка нулевых точек, сбои в канале связи и т.п. должны быть полностью решены на программном уровне.
Входной сигнал от приемника проходит целую цепочку проверок на достоверность. Полярность сигнала от приемника определяется автоматически и на работу не влияет. Каждый поступивший импульс проверяется на длительность стандартного РРМ сигнала (от 600 до 2400 мкс). Не соответствующие импульсы отбрасываются.
Дополнительно входной сигнал проходит через цифровой фильтр. Это снижает влияние возможных помех и перебоев связи.
Выходной PWM формирую программно аппаратным методом. Как уже было замечено, при любом зависании выходного сигнала автоматически не будет.
Про процессор я уже писал. Ардуинка не самая мощная сейчас платформа, но для назначенных целей вполне подойдет. Время выполнения одного прохода рабочего цикла сейчас 1-2 мс. Более чем достойно.
Датчик давления один из самых современных. Он выпущен не более 3-х лет назад. По этой причине большинство устройств которые делались ранее используют предыдущие версии этого датчика. 085, 180 и т.п. Они менее точные и более громоздкие.
Реальная точность определения высоты у меня получилась 0,3-0,5 метра. Но тут есть нюансы. Можно получить точность 10 см, но время преобразования с фильтрацией вырастает до сотен миллисекунд, что совсем не приемлемо для быстролетящей модели. Поэтому точность намеренно снижена, зато гарантируется фиксация параметра высоты каждые 25 мс. При скороподъемности модели 15 м/сек выходит набор высоты 40 см за 25 мс, что вполне соответствует точности измерения.
Ну и с атмосферой не все так просто. Мгновенные колебания давления (ветер, температура, солнце) составляют +/- 1 метр высоты. Долговременные изменения давления, когда атмосферное давление растет или падает, составляют до 1 метра в минуту. Поэтому точность 0,5 м реально вполне оправдана.
Как организатор соревнований в Сибири, столкнулся с проблемой лимитеров. Число участников у нас постоянно растет. Особенно много появилось планеристов среди детей. И тут встал вопрос оборудования. Многие желают летать по официальным правилам, но ни один “желающий” не потрудился купить это оборудование хотя бы себе. Про детей вообще промолчу, тут итак все понятно.
Обсуждение вопроса правил соревнований с нашими пилотами привело меня к мысли, что самый простой способ решения проблемы это бюджетный лимитер.
И решил я создать свою конструкцию. Сразу замечу, что я не собираюсь создать сертифицированное FAI устройство. Вряд ли меня допустят с ним на официальные российские соревнования. Но функциональности для проведения соревнований я планирую на 100% хватит.
Разбавим квадрики чем-то необычным - сколхозил робота-паука на базе Adruino Uno и 12 шт. 9g servo.
На борту также UBEC 5V / 3A и Bluetooth-модуль, который пока не используется, но планирую, сделать сего жука-паука управляемым с телефона.
Самое сложное для меня, это было приклеить сервы на сервы. Собственно, то соединение, что есть сейчас - тоже не идеальное и его всячески колбасит. Может быть есть какой-то универсальный способ, как клеится серва к серве, буду благодарен, если кто поделится советом или ссылкой.