New entries

4.0.4: yadi.sk/d/wmr4ePZV3JKAhV
4.0.5: yadi.sk/d/WSlYeBDg3JKAg2
Все знают, что дребезг кнопок усложняет жизнь программистам. Один из способов борьбы с ним “на уровне железа” - использовать RC-цепочку:

Соберу полезные ссылки:
- Очень полезный курс для первокурсников по STM32: link
- Очень полезная статья на Хабре - разъясняется робота на уровне выставления отдельных бит: ссылка
- Справочник по языку Си: ссылка
- Создание проекта в Keil без CubeMX: link
- Полезные уроки по программированию STM (в осноном по SPL-библиотеке): ссылка
- Пошаговое написание библиотеки для символьного дисплея: ссылка
- .
Почти продолжение темы rcopen.com/blogs/74247/23628
В общем, подошел кардинально с другой стороны. Т.Е. железо совсем другое: был куплен на пробу датчик BNO055 и прикручен к первой попавшейся в руки платке с STM32F103
почему такой выбор? да всё просто: на платке есть разведёный разъём i2c и с аппаратным USB - платка самодельная завалялась с эпохи легенд, показывать её нет смысла. Если кому интересно - можно взять какую-нибудь stm32duino на 103-м проце бакса за 2-3. BNO лучше брать шилдик без дополнительного проца ( STM8 ставят) иначе его придётся отрезать ибо мешает он, ну и в даташите уточнить адрес датчика на шилде.
Так вот собирал я эту хрень для сына - что бы башкой можно было крутить в БЗС, тундре и других авиа симуляторах, кстати даже на старичке ИЛ2 работает. При остром желании можно легко переделать эту штуку в хедтрекер для FPV-шников…
Но, к сожалению, после испытаний на сыне, выяснилось, что не хочет он “дополненой реальности” в играх и играет он дальше как и было…
в общем я этот проект бросил… в github
Посчитал ещё 2 угла установки для стабилизирующих поверхностей.
-2 градуса ( я думал что +2 угол атаки всей модели) вывезет, но ошибался.
-8 градусов (добился каплю прироста качества, и каплю снижения скорости планирования) но и есть потеря в скорости планирования.
А также расчеты показали что при -6 и -8 градусов установки стаб.поверхностей требуемая одна и та же тяга и составляет 2600-2800г, т.е. уменьшить эту тягу уже точно нельзя углом стаб.поверхностей. Выбранный мотор+винт мой конечно это не потянет 😦
Все расчеты доступны по той же сылке из дневника часть 5
Актуальная информация для полётов в новых реалиях
Я позвонил по этому телефону…(495) 436-7558
Попал на начальника смены московского узла. и понял что пошёл правильной дорогой!
Очень спокойный вменяемый и терпеливый дядька спокойно и неторопливо разговаривал со мной больше получаса, ждал когда я в компе найду координаты интересующих меня полей и дал по ним исчерпывающую информацию рассказал подробно как куда и кому в какие сроки и от кого подавать заявки и какую реакцию на них ждать и в каком направлении мы все в том числе и они заинтересованы двигаться чтобы всем было комфортно, удобно и безопасно…
Надо чаще общаться!
Замечательно пообщались, узнал для себя много нового и полезного. Если кому интересно звоните расскажу…
903742 шесть ноль шесть шесть.
В двух словах тут не расскажешь не стесняйтесь звоните!
gkovd.ru/…/dlya-polyetov-bespilotnykh-vozdushnykh-…
Оперативные органы ЕС ОрВД
Адрес электронной почты
Завершил расчет всего ЛК со стаб. поверхностями.
Расчет в экселе доступен по той-же сылке из 5 части дневника.
Какие получаются итоги:
ЛК с установленными стаб.поверхностями под углом -6 градусов.
- Сопротивление самолета стало больше, угол планирования стал больше, нужна большая тяга для прямолинейного полета и она почти в 2 раза больше было 700г стало 1250-1550г ,
а это уже предел по выбранной винтомоторной группе. - Качество снизилось на 35% было 30,2 стало 19,5
- Чуть меньше стала выгодная скорость всей модели.
Дальнейшие расчеты связаны с пересчетом на другой угол установки стаб.поверхностей.
А так же требуется расчет запаса продольной устойчивости.
Вместо того чтобы заняться делом и лепить прошивку паялки, решил сначала позакрывать явные пробелы в LittlevGL. Один из них - поддержка интернационализации. Вообще, формально, есть gettext, но он хранит словари в файловой системе, а для эмбедов надо что-то другое.
И как-то вот не получилось найти под сишечку достаточно гибких и удобных решений. Возможно, плохо искал. Но что-то мне подсказывает, что дело в отсутствии пакетного менеджера, из-за чего вагон сишных библиотек зависает на уровне поделок энтузиастов. В общем, решил что быстрее запилить свое. С мыслью что на Rust это потом тоже пригодиться.
Несмотря на название, получилась довольно универсальная вещь, работающая по тем же принципам что gettext:
- Фразы сканируются в yaml-файлы (формат как в формат в ruby)
- Потом можно либо заполнить переводы ручками, либо прокинуть дальше, в веб-переводилки (потому что формат файлов стандартный)
- В любой момент можно “скомпилировать” переводы в С-шный исходник.
С учетом “особенностей” сишечки, чтобы не возиться с внешними библиотеками, скрипты генерят 2 файла (“lv_i18n.h” и “lv_i18n.c”), в которых есть все что надо.
Посчитал пока центральную часть крыла и даже прикинул как оно полетит без стабилизирующих поверхностей.
Двух метровое крыло, 2,1 кг, будет летать примерно 55км/ч c наивысшем коэффициентом качества крыла 30.
По расчетам показательно видно, что нужно пересчитывать идеальный профиль на свое реальное крыло.
По сылке Еxcel с расчетами
drive.google.com/file/d/…/view?usp=sharing
Прикинул доступную мотор-винт пару
Винт 10х5 или 254х127мм
Мотор Turnigy Aerodrive SK3
3536 1400kv на 3S LIPO ~11.1V = 15400 об/мин - среднее значение оборотов
590W или 0,79 л.с.
Допустимый ток 40A
3.7*4=14.8
14.8 * 40 = 592 Ватт - это пиковая мощность на 4S банках (по паспорту 590W)
14.8 * 35 = 518 Ватт – реальная мощность на 4S банках
Берем 35А и 3S 11.1V
11.1 *35 = 388.5 Ватт – средняя «реальная» мощность или 0.52 л.с на 3S батареях.
Максимальная скорость с таким винтом и двигателем Vmax = 52.7км/ч
Расчетная скорость винта на тех же оборотах Vр = 65.2 км/ч (обороты 15400 об/мин)
На предыдущих выходных осуществил мечту своего знакомого - с коллегой Фёдором немного поснимали зимний футбол с дрона. Жывотные не пострадали; однако снимать пришлось с аппаратов, не очень приспособленных для подобных съёмок; полётное время в трёх вылетах составило 5,6 и 10 минут, что для футбольного репортажа не ахти.
Второй сезон воюем с долголётом; пока никак не побеждаются вибрации на нём; так что пришлось выгонять позапрошлогоднюю гексу и снимать с неё:
Пара новых видео про Урал 4320 и Камаз 4310 в масштабе 1:10
Имандра.
Всем привет . Люблю я самосборы , гораздо больше , чем готовые квадрики . Пару лет назад попала ко мне рама конструкции Андрея Грушина . Собрал на ней коптер , как говориться из того что было , полетал на нем пару раз и… разобрал за ненадобностью свой s500 с трехосевым подвесом . Я просто влюбился в эту раму , после огромных неудобных табуреток (s500 , Discovery, f450 ) , на которых что бы полетать , нужно было обязательно ехать куда то на автомобиле , а он не всегда под рукой . Этот же аппарат , в сложенном виде легко помещался в рюкзак (можно брать на велопрогулку и совмещать приятное с приятным )или в сумку мотоцикла . И вот как только я увидел полетник Matek f405 , сразу появилась мысль , а ведь можно этот коптер сделать ещё компактнее ! А вместо старых огромных esc можно установить современный миниатюрный рег 4в1 . Ну в общем раму я укоротил на 75мм и чуть выдвинул назад место крепления АКБ . Так лучше для развесовки . Моторы у меня Gartt 2312 , пропеллеры карбон 9047 . Камера Xiaomi yi . Подвес сначала хотел Walkera g-2d с переделанным креплением на манер Дискавери , но не получилось . Из за того , что лучи не слищком длинные , поток от передних моторов срывал камеру и подвес не мог ее удержать на месте . Пришлось искать что то другое . Этим другим оказался подвес Tarot t-3d . Из за него пришлось вернуть в конструкцию ноги . Не люблю посадку в руки и взлеты с коробки . Далее все стандартно , спаял , настроил , откалибровал , полетел . На данный момент конфигурация квадрика выглядит так : Рама - скаладная из текстолита и профиля , укороченная на 75мм . Моторы Gartt 2312 960kv , реги Racerstarr Lite 30a , пропы карбон 9047 . Мозги Matek f405 ctr , видеопередатчик Boscam Ts5828 , антена клевер Aomway .
Купил я роутер Netgear DGND3700 v1. Накатил на него OpenWRT. А дальше выяснилось, что:
- во-первых, к нему можно подключить ардуину через UART: ссылка
- во-вторых, ардуину можно подключить через SPI интерфейс, подпаявшись к ногам проца (имеются баги драйвера)
- в-третьих, проц имеет 38 GPIO и только 14 из них используются под светодиоды и кнопки
- в-четвертых, можно подключить ардуину по I2C, используя два GPIO: ссылка
- в-пятых, можно подключиться по USB: ссылка
Есть идея - управлять через роутер блоком реле.
Пока народ примеряется к постройке большого и лёгкого слопера, потихоньку выклёвывется другой проект. Тоже большой.

Назначение, функции.
Контроллер создавался под свои нужды. Хотя, думаю что он подойдет по функционалу многим строителям Bait Boat.
Работает с бюджетной аппаратурой FlySky FS-i6.
Контроллер будет крайне полезен коллегам, кто хочет объективно и точно оптимизировать винтомоторную группу на кораблике.
Для этого имеется отображение на экране пульта:
- Напряжение батареи на борту.
- Ток потребления от бортовой батареи.
- Мощность потребляемая от батареи.
- Температура датчика ( температура двигателя).
- Скорость кораблика.
К примеру, меняя винт- можно объективно видеть какое потребление идет на разных скоростях и нет ли перегрева мотора…
Тем кто желает точно выводить кораблик в заранее отмеченные точки лова, а так же для поиска этих точек имеются следующие параметры:
Полагаю, рассказывать зачем планеру, да и не только, треба ваять крыло с чистой поверхностью, нет необходимости.
Вроде как очевидно.
Есть, истины ради и нюансы … гребни аэродинамические, турбулизаторы … но это не про настоящий случай.
Итак, как собирается кинематика “чистого” крыла, в подробностях.
На примере центроплана Абсента.
Что есть в работе, на том и показываю.
В первых версиях Абсента, кабанчик в управляющую поверхность, составлялся из деревянной боббышки и покупной вставки-проушины.
Однако время идет, опыт эксплуатации нарабатывается, и кабанчик-вставка в флапсы/элероны на сейчас выглядит вот так:
Дела идут потихоньку .
Вертолётик Блэйд 300Х продолжает летать.
При ремонте цапф ОР дважды возникали непонятки, причины которых не были явными и нашлись причины не сходу.
Подшипники в цапфах менял не раз, и всё всегда было нормально, без нюансов.
Дошли руки запилить держалки плат и собрать стенды паялок. Фотачки еще не снял, потому что переделываю то что натворил. Во-первых одного слоя силиконового коврика и “аэрогеля” оказалось маловато для теплоизоляции платы. Либо зря я нагрел керамическую пластину до 300 градусов, тогда как реально надо только 220 😃.
Решил не гадать, а сделать по науке - сначала верх нагревателя покрасить черной жаростойкой краской, потому что это радикально влияет на передачу тепла. Дальше подложу побольше силикона и буду решать, приворачивать вентилятор или нет. Надеюсь что обойдется.
Самая “правильная” краска в наших краях - Certa, но ее под рукой не оказалось, взял первую попавшуюся. Абсолютно все жаропрочные краски надо после нанесения греть ~ на 200 градусах, чтобы в них прошла реакция окончательной полимеризации. До прогрева краска конечно сохнет, но прочность покрытия никакая.
Некоторые команды CLI для iNAV. Постепенно складываю в одном месте используемые мной команды, применительно к самолету.
FAQ: бес-коллекторные моторы
13 Комментарии
Владимир Фаршатов ( Arhat109
) Вчера в 13:25 (252 Показов)
В сети крайне мало внятных описаний работы, расчетов по перемотке и вообще по сему девайсу.
По мере понимания и возможности буду постепенно дополнять то, что дошло до самого, может кому-то будет полезно.
1. Бесколлекторник - это ДПТ или синхронный двигатель?
Пару лет назад установил на даче датчик BME-280, измеряющий температуру-влажность-давление, и отсылающий данные на народный мониторинг.
Сейчас пришла мысль сделать настоящую погодную станцию, которая будет измерять также силу и направление ветра, количество осадков, освещенность.
Программа Cura - которая шла в комплекте с 3D принтером отличается не только простотой, но своими глюками. Посему многие советуют заменить ее более продвинутым продуктом - слайсером Simplify3D. Последний видимо можно назвать эталоном в мире слайсинга.
Профиль Anycubic Kossel для Simplify3D: ссылка.
Здесь подробно рассказывают о всех настройках этой программы: ссылка
Пример видео, где объясняются основные настройки:
Продолжается бразильский сериал на тему горизонтальной вибрации на самодельном долголёте; предыдущая часть тут.
После опробования различных вариантов решения проблемы вибраций решили поменять моторы - предыдущие 5010 в ходе предыдущей борьбы были биты-перебиты, и мы грешили на их проблемы с валами; так что проблему решили кардинально, заказом куда более дорогих Таротовских моторок 4008, причём не дешёвой, а дорогой версии, т.н. Тарот Мартин, о 330KV:
Добавлена прошивка с поддержкой модуля XL7105 и протокола AFHDS
Тестировалось на аппаратуре FlySky FS-TH9X и FlySky i6 в режиме AFHDS
При первом подключении биндится, второй и последующий разы обнаруживается компьютером как HID джойстик.
Скорости достаточно чтобы в FPV Freerider получить время круга как на таранисе по USB.
Всегда было интересно, как сделаны большие роботизированные манипуляторы, которые мы постоянно видим в завораживающих сценах работы различного рода автоматических производств. Следующие ролики немного проливают свет на это дело:
Полезное видео по горячим клавишам Архикада:
Поисковый маяк tBeacon на базе Ардуино промини и модуле si4432 или RFM22B. Недавно упало летающее крыло Z84 wing , к моей удаче видеолинк присутствовал ,удалось найти модель в лесу. Надо было срочно ставить тигромуха, компоненты были в наличии ,но не было пленки под фотопринт для изготовления печатной платы,а способ ЛУТ под SMD компоненты подходит плохо , сделал все навесным монтажом . В итоге вышел маяк весом в 6 грамм , тесты в городской черте показали себя вполне хорошо ,среди всего бетона итп ,сигнал пробивался за 1.5км+.
Перевел инструкцию на полетный контроллер FPV F-35 Lightning
Может кроме меня еще кому пригодится.
habrastorage.org/…/nhjtbxr0pdgg5zticqsu9… (2.0 MB)
Уже почти 2 года являюсь обладателем машинки от HK под названием Desert Fox. Катаюсь редко, чаще летаю, но про машинку стараюсь не забывать. Летом в 2018 взял себе обновленную версию, а первая ушла сыну “на игрушки” 😃
Он меня уже давно просил сделать освещение (не зря же там есть под это место, но все как-то не складывалось, да и просто светодиодным не так интересны, а тут заказал кучку ардуин, WS2812B светодиодов и ушел в отпуск 😎
Для проекта подойдет любая ардуино, я взял nano, но в будущем планирую заменить на pro (она меньше и ее можно разместить внутри “водителя”).
Проект стартовал 22.11.2018.
Самолёт окончен строительством 06.02.2019.
Количество форм - 15.
Из них отфрезерованы с ноля - 7.
Непосредственно на формовку ушло 10 дней. Остальное время заняло проектирование, изготовление форм, постобработка как форм так и готовых деталей.
Птенчик выглядит.
Случилась тут со мной одна интересная история. После смены аппаратуры Таранис на Хорус решил я настроить по-уму Компаньон. Заменил родную ФрОС на более привычную и необходимую мне ОпенТХ, конвертировал модели, настроил экраны, телеметрию и пр. Решил запустить в Компаньоне симулятор аппаратуры и тут… полный облом! Запускается симулятор, но пишет “Бэд радио дата” и больше ничего.

Всмысле симулятор есть, но не отображает моделей никаких.
Небывалое дело, други!
С первого раза, и получилось.
Не идеально, есть куда двигаться, но получилось.
Эпопея длиной в две недели закончилась …
Кажу.

Итак история. У пользователя Друг не подключалась minimOSD к APM2.8.
В форуме, как обычно, слали на RTFM и советовали выкинуть старье в мусорку. Но так как было сделано всё по инструкциям, было решено провести мозговой штурм. Вооружившись паяльником и терпением с одной стороны и тимвьюером, интернетом, и желанием разгадать загадку с другой мы приступили.
Железо:
APM 2.8 (ArduCopter 3.2.1)
MinimOSD v1.1
Любую работу, если делать, то работа в итоге сделается.
А тем паче, если работа доставляет удовольствие.
Забрезжил горизонт …
Собссно самолётик.
Киль успешно вскрылся.
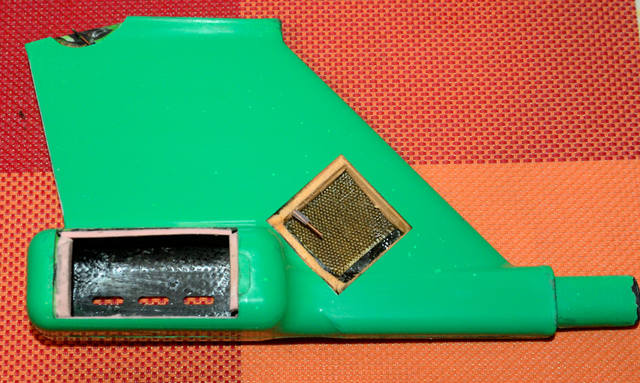
Наименьшая глубина сервоколодца 10.2 мм (правый верхний угол).
Дупло здоровенное, так что для сервушки места более чем.
“Чемоданчик”, кроме всего прочего, получил окна вентиляции.
Все полости вскрывались фрезой 0,8 мм. Таким образом вопрос крышек закрывается автоматически.
Переделка с "пальчиковых батареек " на литий. Установка встроенной зарядки на основе модуля TP4056, подключение XL6009 DC-DC для повышения необходимого питания аппаратуры FlySky i6. Использование встроенного вольтметра и звукового сигнала разряда аккумулятора.Battery Mod + USB Charger
Файлы для печати бокса для литиевых аккумуляторов 18560 Файлы для печати бокса для литиевых аккумуляторов 18560
Монтаж видео с выводом телеметрии Inav blackbox, GPS Подготовка файлов телеметрии c помощью программы DashWare .Как наложить свой GPS-трек на карту Гугла
Так как в inav нет перераспределения ресурсов процессора, для работы lua скрипта требуется аппаратные конвертер, можно купить готовый вариант но я собрал свой, берем какой нибудь советский приемник, магнитофон или телевизор, но можно купить детали на барахолке и собираем схему, как на картинках ,подключаемся к smartport,достаточно одного провода, можно разобрать приемник и подпаяться на прямую, я подключал конвертер к 1му uart. загружаем скрипт на флешку(там две папки) в корень тараниса, ( скачать скрипт github.com/iNavFlight/LuaTelemetry/…/V1.5.1 ).
обязательно в cli вставляем и сохраняем set smartport_uart_unidir = ON .
если не заработало, выключаем коптер и аппу, включаем и ищем новые сенсоры. как вывести скрипт думаю знаем)
все!
Для ardupilot работает так же -Подключение так же(я подключал к 4 порту это сериал 2). установил значение 4 скорость 57. перезагрузил- данные пошли. но нужно обязательно удалить сенсоры и найти заново. с айнава не подходят.
Галопом, по Европам.
Дыц!
… путем нехитрых манипуляций … превращается в
Тыц!
Ролик как и сам Газ АА , посвящены 75ти летию снятия блокады Ленинграда!

Реверс рулевого управления:
1. Нажмите и удерживайте кнопку SET на передатчике в течение двух секунд.
Светодиод состояния будет мигать зеленым.
2. Поверните и удерживайте руль влево или вправо.
положение (не имеет значения, какую позицию вы выбираете).
3. Удерживая руль на месте, нажмите кнопку SET
перевернуть канал.
4. Канал теперь перевернут. Подтвердите правильную работу сервопривода
Плод больной фантазии …
Будет от такой крокозябр.
Днище.
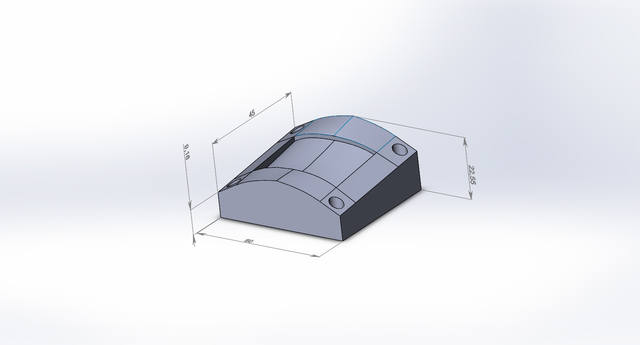
Боковушки. Вторая, ессно зеркало.
Даже летающий планер нельзя считать завершенным проектом. А уж на этапе рисования меняется всё. Вот и хвостик поменялся.

github.com/littlevgl/lvgl/issues/667
Я уже неоднократно упоминал, что озаботился модной и современной разработкой софта для всяких электронных девайсов. Когда с веб-разработки переключаешься на железки, такое впечатление, что вернулся лет на 10-15 назад в какой-то ад. Обсирать закостенелость эмбедов можно долго и аргументированно, но это не конструктивно. Поэтому речь пойдет о конкретных прикладных задачах и как с ними быть.
Решил этой зимой построить радиоуправляемых аэросани. Такие, чтобы были быстрыми и управляемыми. Изначально выбрал трехточечную схему - с двумя лыжами спереди и одной сзади. В качестве силовой установки - два обычных кратерных мотора размера 2205. Первым этапом сделал опытный образец, с фиксированными лыжами и управлением только за счёт дифференциальной тяги двигателей.
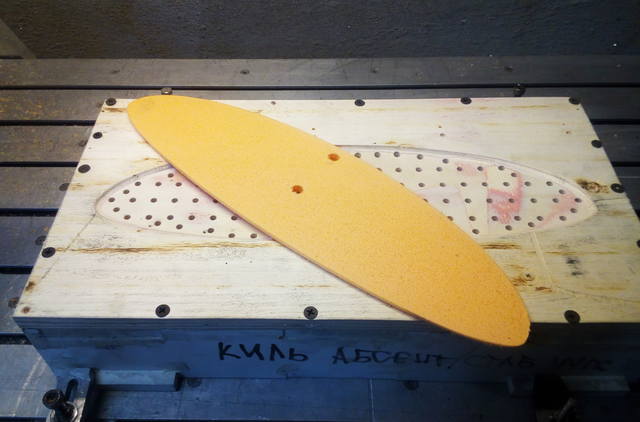
Нехило так, пять дней на киль.
Однако, со второго раза всё получилось.
Еще бы не получилось, с толкателями-то …
У меня на случай неудачи были еще две технологии заготовлены, чтоб киль залобать, но обошлось всё базовой технологией.
Итак, что же вылупилось?"
Киль, собственной персоной.
Основным, и, по-моему, самым “страшным” недостатком шлема FXT Viper является попадание пыли и мусора внутрь шлема на зеркала. Между тем защита от этих неприятностей элементарна. Нужно пристроить защитное стекло или пленку. Я для простоты вставил пленку. Рассчитывал, что это будет временное решение. Ага. 😃