Полетные контроллеры Matek Systems

Выкладываю ролик как обещал.
В теме по Inav не раз обсуждалось. Смотреть с 24 минуты
Подскажите пожалуйста, кто может. inav, F405-wing подключаю vl53lox к шине i2c - все нормально сонар горит синим, датчик определяет расстояние в сенсорах корректно. Беру тот же датчик и подключаю его к f411-wing, тут уже другая история. Сонар красный, в сенсор недоступен. В конфиге устанавливаю все одинаково. в чем может быть причина?
Всем привет, вопрос по Matek F405-CTR (собираю первый коптер). У меня рама как я понял перевернутая, если я переверну полетник но стрелку оставлю вперед то это будет адекватно работать?
Как я понял припаивать регуляторы можно в любые места (потом просто переключить при настройке) или лучше как для “неперевернутого”?
У меня рама как я понял перевернутая, если я переверну полетник но стрелку оставлю вперед то это будет адекватно работать?
Адекватно будет работать при любом повороте, но нужно указать эту поправку в конфигураторе. В вашем случае это roll 180.
Как я понял припаивать регуляторы можно в любые места (потом просто переключить при настройке) или лучше как для “неперевернутого”?
Силовые провода можно припаять в любое место. Сигнальные - к соответствующим площадкам. Переключить при настройке тоже можно, но только в Betaflight.
Адекватно будет работать при любом повороте, но нужно указать эту поправку в конфигураторе. В вашем случае это roll 180.
Силовые провода можно припаять в любое место. Сигнальные - к соответствующим площадкам. Переключить при настройке тоже можно, но только в Betaflight.
По поводу первого я понял.
По поводу 2: а что сейчас актуальнее/лучше Betaflight или Inav?
Так наверно будет удобнее по примеру. Будем считать что это не перевернуто
Для перевернутого наверно самый простой вариант припаять сигнальные как не для перевернутого, а потом перевернуть и регуляторы вернуть в исходное состояние…
(собираю первый коптер). У меня рама как я понял перевернутая
А можно одним глазком на перевернутую раму взглянуть?
А можно одним глазком на перевернутую раму взглянуть?
Да вот ссылка https://aliexpress.ru/item/32999861868.html Как вариант можно собрать в обычную, если не следовать инструкции.
Ну еще как вариант, собирать по “стандартной” схеме, вставить, моторы припаять в последний момент…
если не следовать инструкции.
Какая же она перевернутая, обычная рама. Просто крепление полетника под брюхом.
Какая же она перевернутая, обычная рама. Просто крепление полетника под брюхом.
Тут прикол в том, что у матека 405цтр разводка питания регулей оказывается снизу и их пайка становится немного сложнее, когда начинаешь собирать как положено.
…И тут появляется непреодолимое желание все перевернуть.
Тут прикол в том, что у матека 405цтр разводка питания регулей оказывается снизу и их пайка становится немного сложнее, когда начинаешь собирать как положено.
…И тут появляется непреодолимое желание все перевернуть.
Да, именно поэтому, что потом не подлезть или провода длинные делать
когда начинаешь собирать как положено.
Трудности конечно есть, но для этого и нужна голова. Как выйти из ситуации есть много вариантов. Выбирай на вкус.
или провода длинные делать
Силовые провода регулей можно припаять как удобнее, а управляющие(можно один) и так длинные. Или как вариант приобрести регули 4 в 1.
По поводу 2: а что сейчас актуальнее/лучше Betaflight или Inav? Так наверно будет удобнее по примеру. Будем считать что это не перевернуто
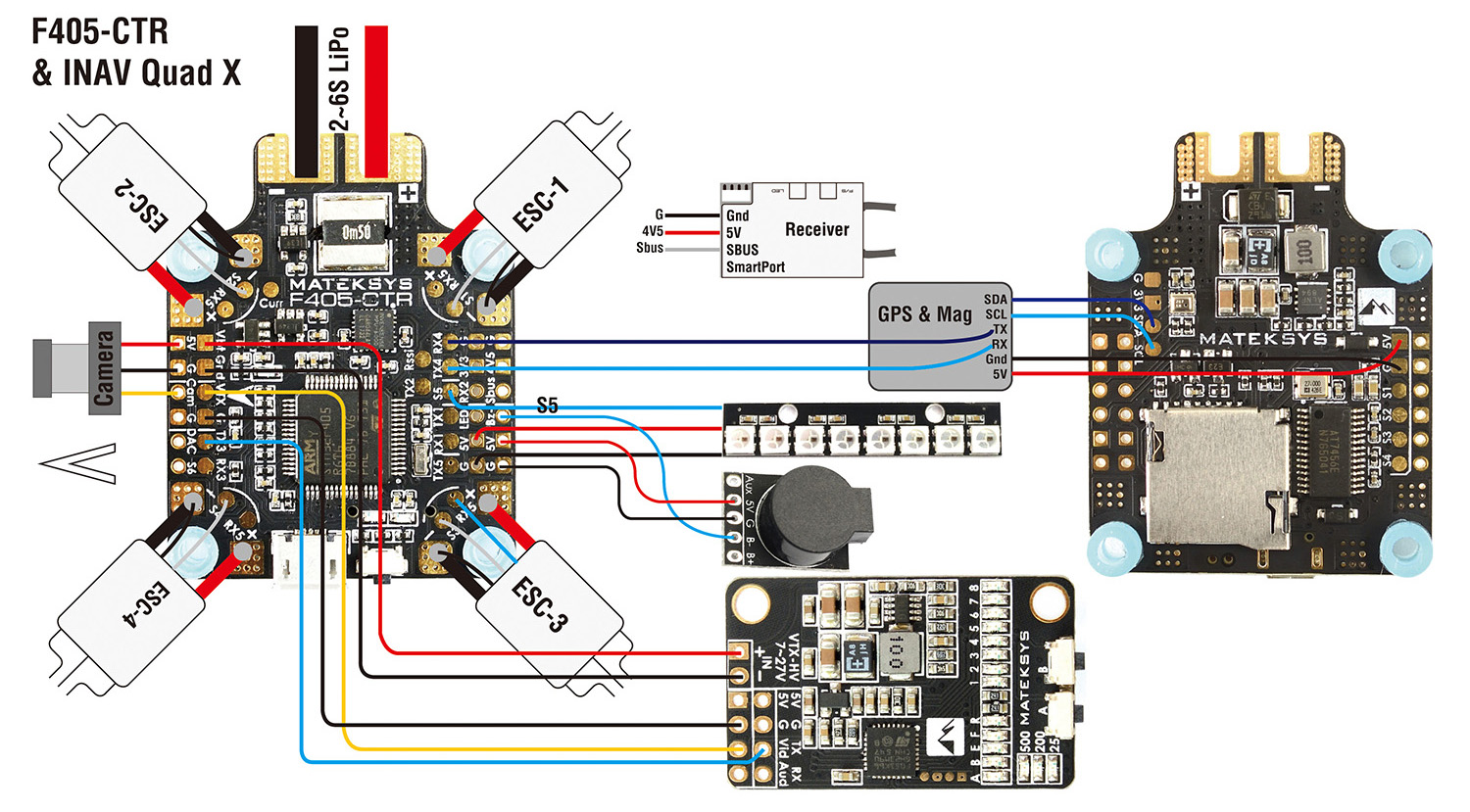
По поводу сигнальных проводов уточню. Плату можно поворачивать как угодно. Но на плате есть пятаки для моторов: S1, S2, S3, S4. Так вот, независимо от поворота платы, сигнальный провод 1-го мотора всегда паяется на S1, 2-го на S2 и т.д.
Обратите внимание, что пятаки дублируются. Они есть на углах платы, и есть с обратной стороны платы в вряд.
При нормальном расположении провод от каждого регулятора тянется до соответствующего угла платы. Если плату перевернуть, сохранив при этом провода, то получится, что они перекрещиваются и тянутся к дальним углам платы, что некрасиво и неудобно.
Вместо этого их можно припаять не к углам, а к альтернативным контактам в ряд, где поворот платы практически никак не будет влиять.
И наконец, если припаять провода к несоответствующим контактам, то нужный порядок можно задать в Betaflight, но не в Inav.
Что касается актуальности Inav или Betaflight, то они оба актуальны, и служат для разных задач. Betaflight - гоночная прошивка, а Inav - навигационная.
Помогите советом. Matek f411 wse оба uart заняты(жпс и сбас) нужна телеметрия MAVLINK ( неинвертированный сигнал) возможно ли получить его с softserial.?пробовал по всякому не получилось.
Да, спасибо, на S5 всё сразу заработало. Моя ошибка, плохо читал мануал: для BF выход LED, а для INAV - S5.
Добрый день. Вы перепаивали или переназначали порты?
Я не могу подключить плату WS2812D к F722-SE. Подключаю как на сайте, но А15 пустой.
Какой командой переназначиь LED на А15?
Какой командой переназначиь LED на А15?
Никакой, inav не поддерживает ремап ресурсов.
Никакой, inav не поддерживает ремап ресурсов.
Т.е. подключить WS2812d к Matek F722-SE никак нельзя?
Т.е. подключить WS2812d к Matek F722-SE никак нельзя?
Почему нельзя? Подключаете к выводу LED, включаете и настраиваете в конфигураторе. Просто на A15 комнадой в cli не переназначите никак.
Такой вопросик, на некоторых платах указывается ток, к примеру, 132А. Это максимальный ток который может выдержать плата? А вообще какие постоянные токи выдерживают платы матек без последствий?
Это указывают какой ток он может измерить. Ведь там большой ток течет только через токоизмерительный шунт. Напаяйте вместо него awg8 и 300 ампер выдержит, правда измерять будет нечем 😃.
А вообще какие постоянные токи выдерживают платы матек без последствий?
Мне на такой же вопрос так и не ответили. Поэтому свой коптер даже не знаю как распаять. Думаю два мотора распаять через Матек, а два напрямую от батареи. Потом просто умножать на два в уме.
А вообще какие постоянные токи выдерживают платы матек без последствий?
Больше, чем выдаст батарея.