Квадрокоптер DEXP H-1 он же Freex skyview quadcopter

В pitch втыкай, насчет стороны - вольтметром найди минус, это какой-то из крайних и в Другой и втыкай - это сигнальный
Хорошо, но ведь в ряду Pitch не 2, а 3 штыря. Один - земля, какой-то один из остальных двух содержит сигнал управления - какой именно? Метод 3П освоил в совершенстве, но в данном случае им не хочу рисковать, хочу узнать наверняка.
Хорошо, но ведь в ряду Pitch не 2, а 3 штыря. Один - земля, какой-то один из остальных двух содержит сигнал управления - какой именно? Метод 3П освоил в совершенстве, но в данном случае им не хочу рисковать, хочу узнать наверняка.
Задачка на логику))) есть разъемы с подписями, дайка загляну в словарь, о Pitch это Наклон, так куда тыкать узнали. Далее есть разъем с 3мя контактами, один из крайних минус а другой сигнальный и есть джек на 3 контакта и один из крайних с проводом, сигнальным - вопрос, как так воткнуть чтоб в минусовый не попасть.
Решение - раз один из крайних минус, а другой сигнальный, то центральный наверно …о блин, он плюсовой.
Хотя провод с 3 пиновым разъемом и собсно проводом в крайнем у квадра уже содержал подсказку что один из крайних сигнальный, а еще если у разъема провода есть бортик то он совпадет с бортиком в разъеме подвеса. О как.
Мудреная логика. Так как же из нее вывод, какой конкретно штырь, к которому надо подключиться?
И откуда тут мог взяться минус? Плюс - это я понимаю, его и опасаюсь.
А вот минус - это если 2-х полярное питание, откуда тут ему взяться? 😵
Мудреная логика. Так как же из нее вывод, какой конкретно штырь, к которому надо подключиться?
И откуда тут мог взяться минус? Плюс - это я понимаю, его и опасаюсь.
А вот минус - это если 2-х полярное питание, откуда тут ему взяться? 😵
Вам вроде как все разжевали, вывод вы уж как нибудь сами, несколько раз перечитав текст. Квадрик у нас такой, подумать заставляет )
это не компас - это жпс … желтый дата … красный +5… коричневый дата …
Ага, а питается он святым духом)) коричневый тогда уж минус, тем более насколько помню картинки по подключению осд где какой контакт видно.
конечно же коричневый - минус … просто описка произошла … . сразу не заметил …
Вам вроде как все разжевали, вывод вы уж как нибудь сами
Судя по до невозможности креативному совету, разжевали так, что и сами ответа не знаете.
Иначе сказали бы конкретно какой штырь, а не водили вокруг да около как Иван Сусанин.
Логические загадки я и сам могу загадывать, только здесь они совершенно ни к чему.
разжевали так, что и сами ответа не знаете
я то знаю, раз вам гуглом для поиска мануала (а в комплекте ее не было?) или инструкций влом пользоваться, я вас таки попробую дожать до правильных выводов.
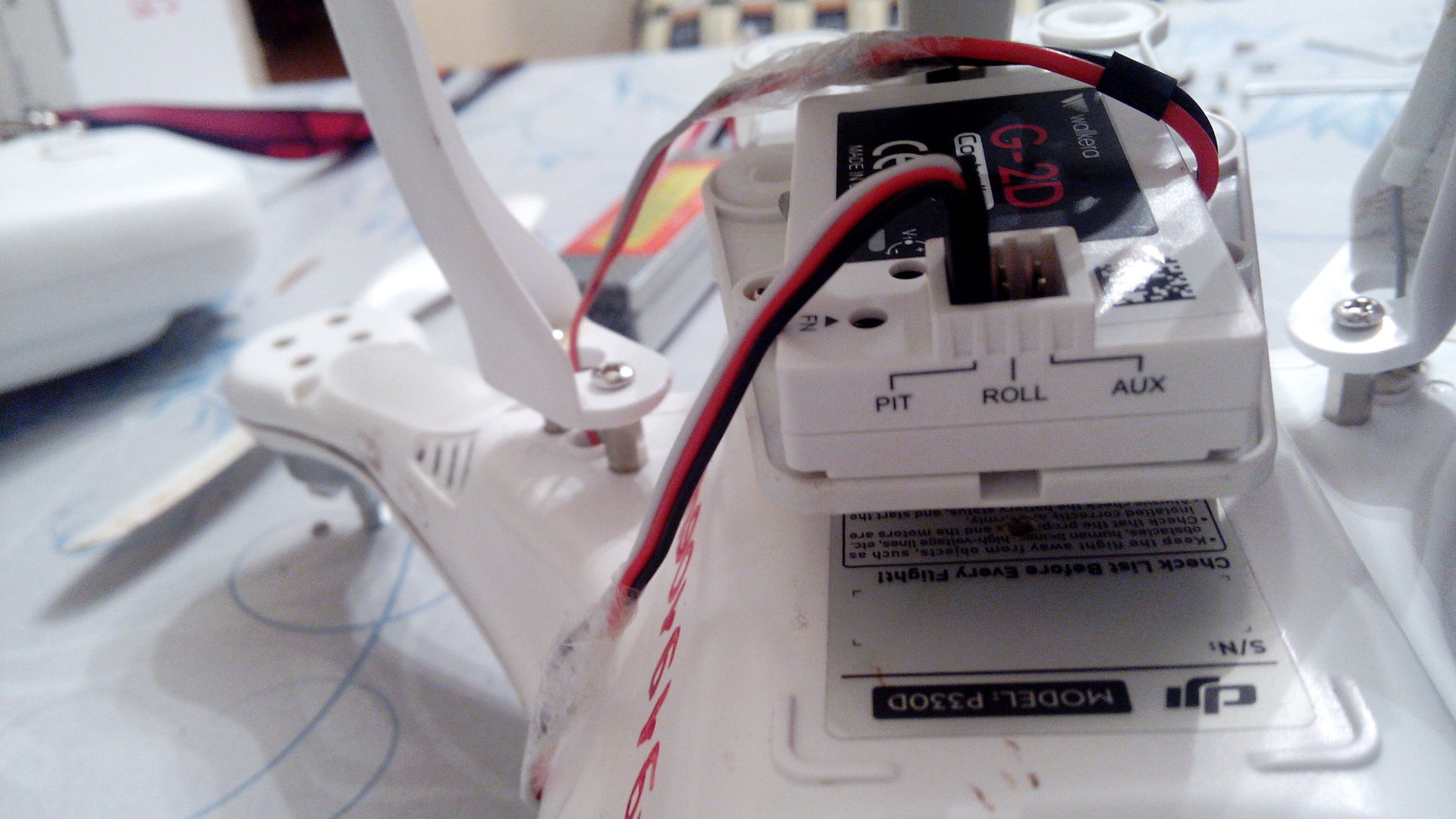
Вот на картинке отличная подсказка - обычно черный это минус, красный плюс - ну дальше надеюсь уже догадаетесь ))
leost6791: Сэр, как бы вам пояснить, чтобы вы не обиделись…
Я разобрался в этом вопросе самостоятельно, а ваша т.н. “помощь”, кроме раздражения, ничего не дала.
Рассказываю не столько для вас, сколько для других форумчан, которым, возможно, придется подключать G-2D к FreeX.
-
В мануале перечисляются только группы контактов - PIT, ROL, AUX.
-
Назначения отдельных штырей нет ни в мануале, ни в гугле, ни в обзорах, не один день пытался найти распиновку.
Единственный вопрос на эту тему, заданый в 2014 г. в www.rcgroups.com/forums/showthread.php?2234786-Fre… под номером #413, так и остался без ответа. -
“Землю” подвеса с самого начала нашел без труда обычной прозвонкой.
-
Сложность была в назначении двух оставшихся штырей.
Понятно, что один из них управляет наклонами подвеса вверх-вниз, для чего второй - так и осталось непонятным, хотя вначале предположил, что это управление боковыми наклонами - увы, нет. -
Сбило с толку то, что одиночный “белый провод”, выходящий из коптера от среднего контакта группы G7 приемника, приходил на средний контакт разъема подвеса.
Поскольку нигде информации о распиновке штырей нигде нет (видимо, создатели этого подвеса просто не задумывались над тем, что он может использоваться, кроме Валкеры, на других коптерах, поэтому распиновку в мануале не предоставили), пришлось предположить, что “белый провод” должен действительно приходить на средний контакт подвеса (это было ошибочное предположение, опять-таки из-за вакуума технической информации).
В-общем, подвес с пульта в такой конфигурации упорно не управлялся. -
Тогда я занялся комплексной проверкой пульта с коптером.
Присодинил вольтметр на выход контакта группы G7 приемника и начал перемещать рычажок в крайние положения. Вольтметр показал измнения от +0,16 до +0,32В, значит, пульт управляет подвесом вплоть до выхода приемника (понятно, что там идут импульсы, но мне было лень для такой простой задачки разворачивать осцилллограф). -
Далее я подключил к среднему контакту подвеса сервотестер.
Но подвес не реагировал и на импульсы сервотестера тоже.
Итак, теперь уж все эксперименты указывали на то, что средний контакт не управляет подвесом, поэтому переключил “белый провод” на крайний контакт. -
После этого переключил “белый провод” на дальний контакт PIT, и естественно, подвес заработал.
Почему не сделал сразу этого переключения? Потому что тыканье контактов наугад - не мой метод, при неудачном стечении обстоятельств можно и дымок с характерным запахом получить с последующей покупкой выгоревшего на Алиэкпрессе. -
Невыясненных осталось два вопроса:
- почему наклоны происходят наоборот - рычажок на пульте вверх, а камера в подвесе вниз?
- для чего средний контакт в PIT?
но они уже не столь важны.
Так что, сэр, ваши ненужные загадки и разлагольствования в этом вопросе, который требует точности, полноты и однозначности, просто не уместны на техническом форуме и никому не принесли пользы.
Вы дилетант в электронике, коих здесь много, и это чувствуется в ваших пространных и бесполезных рассуждениях.
Не делайте так больше. Техника - наука точная, это вам не блудливая юриспруденция.
Кто-то использует Тигромуховский маячок на FreeX? Как он, GPS нашего квадрика понимает?
Кто-то использует Тигромуховский маячок на FreeX? Как он, GPS нашего квадрика понимает?
Похоже, легендарный TBeacon наш Freex не понимает. К сожалению 😦
Подробности изложил здесь rcopen.com/blogs/127344/20521#comment96 25/08/2017.
Ура - изобретатель маячка сразу же отозвался на эту проблему! 😃
Парни, нужно срочно фото или модель GPS-модуля нашего квадрика, а лучше - и то и другое!
Тигромуха разъяснит нам, почему его замечательный маячок не хочет коннектиться с нашим квадриком.
Эта информация, уверен, приходится всем нам!
Осталось вскрыть GPS-модуль. Кто рискнет? 😃
Друзья! по прошивкам подскажите?
На сайте много версий… Вот на пример:
Flight controller V2 Firmware V4.0 (Auto speed down during RTH if less than 80m)
Gimbal Firmware New Version V1.0 (no need amend rate-limiting parameter)
Gimbal Firmware V2.41
Чем они отличаются? какая на данный момент лучше?
На квадр существует всего 2 прошивки: 3.3 и 4.0 и обзываются Flight Controller. Всё остальное - прошивка подвеса (Gimbal).
У некоторых на 4.0 подглючивает компас, у кого-то всё нормуль. В принципе обе одинаковые, только в 4.0 идет автопосадка по напряжению, и как пишет производитель, снижение скорости автовозврата при подлете к точке посадки на 80 метров.
На квадр существует всего 2 прошивки: 3.3 и 4.0 и обзываются Flight Controller. Всё остальное - прошивка подвеса (Gimbal).
У некоторых на 4.0 подглючивает компас, у кого-то всё нормуль. В принципе обе одинаковые, только в 4.0 идет автопосадка по напряжению, и как пишет производитель, снижение скорости автовозврата при подлете к точке посадки на 80 метров.
Спасибо за подсказку, как определить есть ли у меня проблемы на 4.0? плавает север, который по диоду определить можно?
как определить есть ли у меня проблемы на 4.0?
Если не “унитазит” в разных режимах, без проблем возвращается “домой”, значит всё нормуль.
Если не “унитазит” в разных режимах, без проблем возвращается “домой”, значит всё нормуль.
Унитазит? плохо весит это да… Домой возвращать на этой прошивке не побывал…
Унитазит?
Унитазит - это значит начинает делать что-то типа увеличивающейся “воронки” и может резко рвануть в сторону.
Унитазит - это значит начинает делать что-то типа увеличивающейся “воронки” и может резко рвануть в сторону.
Такого вроде нет, но висит не стабильно, плавает ±1-1.5м
Я думаю это не то, наверно стоит пока остатся на этой версии…
Вот, таки нашел модуль в тырнете, фотки хоть и нечеткие, но по ним вроде все понятно -