Автопилот Arduplane - открытое ПО

Поэтому и бережно хранит “houm” там где он ее полседний раз зафиксировал.
В том то и дело, что всегда эту точку хранит. Где бы “хоум” не фиксировал.
Попробую прошить старые прошивки, где терминал работает и через терминал делать “сброс к заводским настройкам”.
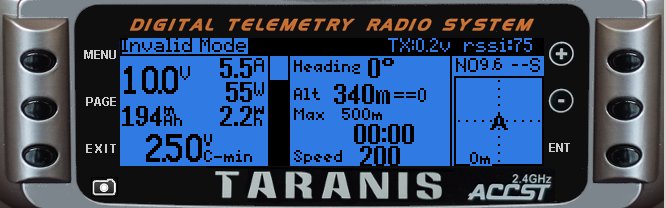
Для владельцев Frsky Taranis с приемником x8r.
Спаял сегодня приблуду. Берет Mavlink (который на MinimOSD идет), кодирует его, сует в Smart Port приемника x8r, дальше приемник отдает телеметрию на передатчик.
В итоге имеем на экране передатчика всякие координаты GPS, напряжения, токи, израсходованные мАч, направление носа самолета, дистанция до него и проч.
Опять же передатчик голосом говорит полетный режим (мануал, лойтер, …)
Стоимость проекта = стоимости платы Arduino Pro mini (200 руб.)
Если строить на Teensy 3.1 (1800 руб.) то просто будет больше проговариваемых параметров (в Arduino Pro памяти поменьше).
Проект тут
github.com/wolkstein/…/s-c-l-v-rc-opentx2.1
Думаю это сработает и для обладателей Turnigy с прошивкой OpenTX модулями от FrSky, а так же обладателей не XJT модулей, а DJT (там решения проще, можно поискать в инете).
А у кого Pixhawk, так вообще лафа
copter.ardupilot.com/…/common-frsky-telemetry/
Ребята скажите кто в курсе, калибрую компас на скае v6, кручу его верчу, потом МП останавливается, вылетает табличка с какимито цифрами, и это все? получается он откалибровался?
Бинго 😃
вылетает табличка с какимито цифрами, и это все?
Если циферки не слишком большие, то да.
Если циферки не слишком большие, то да.
-94 -28 -3 это много или нет?
-94 -28 -3 это много или нет?
По моему вполне терпимо.
а скажите скорость у меня стоит м/с а как думаете лучше км/ч поставить может? если да то гд меняется, думаю что км в час както привычней чтоли будет
Если циферки не слишком большие, то да.
Если большие, то это тоже не всегда совсем плохо. У меня по одной из осей магнетометр (lsm303d) выдает где-то 450.
На 32-битных платах EKF выдает в логах характеристику сенсоров. То есть насколько их показания уплывают относительно остального добра.
Там все прекрасно несмотря на смещение.
dev.ardupilot.com/wiki/extended-kalman-filter/
Если большие, то это тоже не всегда совсем плохо. У меня по одной из осей магнетометр (lsm303d) выдает где-то 450.
На сколько я понимаю, это циферки калибровка конкртеного экземпляра компаса и, в основном, компенсация окружения (с магнитными полями). И чем больше циферка, тем больше вокруг лишних “магнитов”. Разве не так ?
Так и есть. Просто если внешнее поле статичное и не слишком сильное, оно сильно не мешает.
частенько при больших офсетах компас показывает криво некоторые направления, поэтому стремимся к единицам,
если хотябы одна ось за сотню - желательно удалить источник поля или размагнитить петлей
Но если есть возможность проверить, зачем гадать и бороться с проблемой, которой нет. Летаешь, потом смотришь на график, что EKF изобразил. Если выбросов нет, значит все хорошо. Они там на странице написали, какие значения нормальны. Вообще, у “нового” железа главное преимущество на мой взгляд - это логи. Они подробнее, целее и их легче добыть.
скажите а апм сам логи пишет? или их както включать нужно, хотелось бы попробывать записать да потом посмотреть
А не подскажете программку для андроида, которая умеет сливать логи APM. В DroidPlanner и DroidPlanner2 я такой возможности не нашел…
скажите а апм сам логи пишет? или их както включать нужно,
plane.ardupilot.com/wiki/arduplane-parameters/#log…
Есть еще логи, которые GCS пишет (tlog). Они с логами автопилота пересекаются, но есть уникальные вещи и там и там.
В общем победил я сегодня МР, переход к произвольной точке миссии выполняется кнопкой “Уст.WP” предварительно выбрав в списке слева точку к которой идти.
А вот компас по прежнему даёт уклончивые показания(((
Спрошу еще раз,для успокоения… Если компас установлен с отклонениями по крену и тангажу, то это устраняется калибровкой уровня. А вот если АП установлен с отклонением от курса (от оси самика) , то это никак? и чем сильнее АП смотрит в сторону, тем больше боком будет летать самик? И данный косяк можно устранить только идеальной установкой АП внутри самолета…
Спрошу еще раз,для успокоения… Если компас установлен с отклонениями по крену и тангажу, то это устраняется калибровкой уровня. А вот если АП установлен с отклонением от курса (от оси самика) , то это никак? Чем сильнее АП смотрит в сторону, тем больше боком будет летать самик?
Я думаю это устраняется “продвинутой” калибровкой уровня, когда мы фиксируем самолёт по осям.
Я думаю это устраняется “продвинутой” калибровкой уровня, когда мы фиксируем самолёт по осям.
А что такое продвинутая калибровка и как зафиксировать самик по курсу
А что такое продвинутая калибровка и как зафиксировать самик по курсу
А там рядом кнопка, Calibrating accel, когда мы фиксируем самолёт по осям.
По поводу датчика температуры появилась идея. Его можно приделать к аналоговому входу автопилота и выдать за напряжение или ток второй батарейки.
А как в MinimOSD Extra вывести напряжение второй батарейки? В ConfigTool я такого параметра не вижу.