Activity
Какие хорошие складные/не складные шасси для квадрокоптера 650 класса можете порекомендовать?
эти. легкие быстро складываются foxtechfpv.com/hover-upgraded-landing-gear.html
alex42,
купить тут shop.graupner.de/webuerp/AI?ARTN=9944.RTF
или тут www.amainhobbies.com/…/p501454

на аппараты различных контор, производящие бпла, ссылки не даю ибо их много в том числе в России.
искать по “vtol uav”
На канале у Юлиана в роликах есть сборка на 600й раме и речь шла а пайке кондёров по питанию. На регулях впаивал по 1000мкф, а на линии через каждые 15 см по 480мкф, но это был дрон 600го класса на моторах таротах от мартина, а тут не много другая категория!
он наверно никогда не видел силовые и сигнальные линии на www.microdrones.com/en/drones/md4-1000/

меня лично и 50см фаз не смущают.
Продолжение по FPV квадрику с унифицированным креплением\разъемами лучей, аккумуляторов см.
rcopen.com/forum/f123/topic226087/17194
rcopen.com/forum/f123/topic226087/17219
дошел до 3 версии (рендер)

еще рендер i.ibb.co/smWDXvp/p-F3-Sd2-JZS4k.jpg
фото тушки на весах

с котами i.ibb.co/0ZyccZd/DSC00979.jpg
версия 2 i.ibb.co/xML8qgX/IMG-20190623-121148.jpg не долго летала.
в ней я компас на мачту выносил - пытался избавиться от необходимости калибровать его при смене аккумуляторов с 20 банками li-ion18650 на 6 банок.не помогло. все равно нужно калибровать иначе в loiter летит в произвольные стороны.
антенны в неудачном месте и затенение есть и хватать тушку не удобно. все время антенны попадаются под пальцы, заминаются.
фатальным недостатком было отсутствие в креплении лучей достаточной защиты от проворота. легкий краш нарушил фиксацию силовых разъемов внутри трубок. возникла необходимость полной разборки. посему в 3 версии уже переделанные зажимы с парой выступов.
в 3 версии камеру всеж оставил в корпусе. закрепил в кольце на оси с возможностью угол наклона установить ±17гр .
и во 2 и в 3 версии на “свежем воздухе” живет новый видеопередатчик в полном алюминиевом корпусе с возможностью загерметизировать разъем, отверстия.
на 3 версии поставил внешнюю антенну 915Мгц разборную.вытаскивается штырь (белый), вытаскивается противовес и на проводе висит.
думаю сделать кожух\коробочку для безопасной транспортировки тушки в сумке.
Что хорошего в аппарате так это:
в разобранном виде можно большой аппарат уместить в минимальный объем.
зоопарк моторов\пропеллеров таки удается относительно быстро цеплять к одному “мозгу” и эксплуатировать. проверенно на диапазоне пропеллеров 17 и 8 дюймов.
посему проект не бросаю, а продолжаю “пилить”.
В связи с этим хотелось бы прояснить, что именно считается за лучший полет? На что обращать внимание?
в сравнении SF vs MR. На SF меньше скорость изменения оборотов\тяги в силу большей инерции. Для изменения угла наклона аппарата надо больше времени как для раскрутки пропеллера, так и для преодоления гироскопического эффекта. К этому добавляется большая разница воздействия от порывов ветра за счет площади поверхностей и их удаленности от осей вращения (разность усилия на лопастях разных пропеллеров и одного и того же).
В результате аппарат на SF более “вялый” и большая амплитуда возможных отклонений при порывах ветра. Из 2х висящих на удержании позиции аппарата будет сильнее отклоняться и раскачиваться аппарат на SF, вплоть до меньшего порога допустимого уровня скорости ветра для полетов (порывы при которых аппарат не успеет стабилизировать угол наклона и сохранить безопасную позицию в пространстве). Такой эффект как раскачка при снижении высоты будет проявляться раньше на SF.
То есть даже если мы просто хотим повисеть с камерой, на SF мы получим большую амплитуду раскачки и меньшую точность удержания позиции. При прямолинейном равномерном движении все не так заметно, в силу работы инерции всего аппарата на сохранение этого самого прямолинейного равномерного движения.
Про динамичность полетов особо говорить не надо.
вот Anik
прицепил 3х лрпастной пропеллер и жалуется на большую инерцию. Обещает потом зацепить другой ВМГ с запасом момента вращения для большей динамичности, а мог бы пропы mr поставить уже стало был получше.
А вот картинка с rcgroups, кто-то померил APC 1038 SF и 1045 MR.
SF таки оказался эффективнее.
не понятно ничего с их имперскими данными. у мну есть сравнение APC SF 1038vs1047 (а также пары 9,11,12 дюймовые) см. архив yadi.sk/d/wuslSEf8H7bK6w
в папке Sunnysky X4108S 380KV\22_2
так то на стенде без набегающего воздуха все SF 4.7 лучше 3.8

ibb.co/L6n1TBS
, но… не известно что там на скорости по эффективности. Вцелом инерционность\парусность и подверженность флаттеру серии SF однозначно не на пользу динамике полета. Для нас сделали специальную серию MR. Они ближе к треугольным, жестче. С ними аппарат куда лучше летает. Настолько, что даже уже тестировать не захотелось на стенде. Все равно топовые пропеллеры карбоновые треугольные, а тут ловить особо нечего.
Gemfan 1038
вопрос где брали. у меня был комплект, если мне память не изменяет, с бангуда 10тых. на легких крашах пообломались у основания в силу большой хрупкости. то есть достаточно было задеть пол скользящим движением и хрусть. допускаю что подделка. сейчас использую apc серию MultiRotor. там усиленное крепление в добавок к родной прочности.
Ну кончики - это чтоб в длину волны попасть. А я спрашиваю про случай, когда усик прислонен к какой-то части рамы.
ответел в теме про антенны см. rcopen.com/forum/f123/topic262810/2909
экспериенты в ответ на вопрос
А я спрашиваю про случай, когда усик прислонен к какой-то части рамы.
в наличии антенна “сосиска” 2.4Ггц (коаксиальный диполь?)

ibb.co/9ZSygNr
рама из карбоновых трубок 14мм длиной 150мм и листик с углетканью в толстом слое смолы.
ibb.co/TmT3M4S
ibb.co/h1hX6b5
ibb.co/ncDks9n
ibb.co/Yp2wKp9
результаты рандомные. вплоть до “улучшения”, но без приборов лучше не касаться антенной и близко не располагать, я так думаю.
…а вэдь тюбээсник диполи вообще к лучам горизонтально цепляют и далеко отходят на минимальной мощности…как там вопрос к КСВ решается…
хз) провел эксперимент с 1 из антенн

ibb.co/kVZrmBH
Слева антенна относительно свободно висит в воздухе. По центру в воздухе, но в обилие карбона со всех сторон. Справа положил на трубки (усы антенны затянуты в термоусадку).
Видел обзор в котором автор, например, утверждает что карбоновые пропеллеры для mavic air ухудшают связь.
Множеству историй тут у людей о изменении максимальной дальности связи изза изменений расположений антенн на коптере.
Сам сейчас сижу изобретаю разборные, поворотные антенны, инегрированные в ноги, настраиваю непосредственно уже размещенные.
сижу с прибором антенны колдую. у диполя с вот таким прижатием кабеля и креплением ксв падает с 1.3 до 3-5+. очень критично кабель подводить и цеплять что либо усами антенны
Плата Airbot MicroOSD V2.4
Помогите понять с уровнями RSSI.
Включаю в MP отображение пункта rxrssi, понижаю уровень мощности передатчика, довожу до того момента когда отображаемое значение будет равно 50 (как я понял - процентов).
На OSD-же в этот момент показывает уровень порядка 80%.
Судя по пискам аппы я больше склонен доверять уровню rxrssi.
Как привести отображаемый на OSD уровень приёма к тому-же значению что показывает Mission Planner (rxrssi)?
намучался я с этой фигней. косяк в разводке. эти мудаки соединили ногу АЦП (26 PC3 ADC 3) c рэсетом (29 PC 6). Который естественно подтянут к питанию, а если его к нулю притянуть микроконтроллер перезагрузится. Вот когда приемник выдает 0В по rssi за счет делителя на резисторах на АЦП приходит около 2.4В. если будет ниже микроконтроллер перезагрузится.

ibb.co/6RHTwZ1
надо дорожку у ноги ADC подрезать до переходного отверстия
Никита вы такие винты не гоняли на стенде?
нет, но авторитет компании AeroNaut заставляет думать что все там хорошо.
подскажите как снять характеристики Винт/мотор не снимая с коптера? Ватт-метр Скурс имеется
замерить потребление в висении и\или при движении на нужной скорости?
Диаметры верхнего и нижнего винтов делают разными, тоже дает некий положительный эффект.
Возможно ещё обороты моторов нужно делать разными или подбирать различный шаг винта, потому что вниз приходит закрученный поток.
соглашусь с тем что нижний пропеллер встречает разогнанный поток. имеет смысл и\или угол больше, обороты и пр. всмысле добиваться “настройки”.
если вспомнить соосные вертолеты. там вроде как только опасность перехлеста лопастей заставляет выдерживать дистанцию на определенном уровне.
а вот самолет не так ограничен

не между лучами, а расстояние между верхним и нижним пропом
если направление вращений разные, можно сокращать до предела.
теоретически нижний пропеллер частично будет как спрямляющий аппарат.

Интересно а никто копии квадрокоптеров не делает? Из “аватара” например,
это вам к native18 rcopen.com/forum/f124/topic232185
у него много копий разных фантастических летательных аппаратов
Ну это ж хоббикинг, они дорогие, непонятного качества, и доставка конская.Вес мотора 63 грамма.
там “Set CW/CCW (2)” шт за 23.35$ из global склада. вес без крепления пропа -5.5гр. см. www.rcgroups.com/forums/showpost.php?p=32516461&po…
доставка 2хSet 10$
Ни одного упоминания здесь на форуме не нашел, почему? Вроде для гоу-про долголета подходящие?
вот пока вы внимание не обратили, я о них и не знал. таки да, выглядят привлекательно. еще бы таблицу тестов найти.
Хотя по ссылке Вашей они вроде не карбоновые?
Стоит ли заморачиваться переделкой на карбоновые лучи? Увеличивать пропы,как понимаю в данном случае,не имеет смысла?
оригинальные пропеллеры APC это гарантия качества и эффективности . дешевые китайские карбоновые пропы в первую очередь опасны тем,что их технология изготовления не имеет этапа долгого плавного отверждения\охлаждения в матрице (я не знаю терминов пусть будет термоотжиг) после извлечения их геометрия может “уехать” в сторону и просто не соответсвовать матрице, по которой их формуют. вторая опасность - изначально геометрия нифига не эффективная. сопротивление вращению большое, а тяги мало.
для примера я на стенде отбирал пропы 1750 из 20шт только 4шт топовые гдет 12шт среднячки и 4шт мусор, за счет искревления.
или вот разница на стенде 1755
 ibb.co/Jczbgqx
ibb.co/Jczbgqx
ошибок нет. Разница в максимальной тяге на 2х пропах “одной” геометрии 200гр при макс 800гр
а знаете как на вид они отличаются?вот
 ibb.co/L8ZQL34
ibb.co/L8ZQL34
один чуть сильнее закручен. и он мусор.
с регулями проблем меньше, но тоже бывают. для примера ztw spider 40A
у меня с большинством винтомоторных групп “не стыкуется”. что то там в алгоритме не так в результате в одной точке с нормальным регулятором кпд условно 75%, а с ним 60%.
но чаще все более-менее сравнимо вида
 ibb.co/wcNCF3m
ibb.co/wcNCF3m
конктрено ваши регуляторы не известно как эффективно работают, но то что они весят катастрофически много это однозначное мнение.
современные регуляторы под вашу конфигурация так и весят не больше 8гр.
для примера немец рекорды ставит
взлетный вес 3338гр регули весят 4.37гр banggood.com/DYS-BLHeli_32bit-35A-35amp-Brushless-…
но то дорогие, навороченные, от которых понтов пока больше чем смысла. можно найти идеально работающие раза в два дешевле.
по моторам проблем еще меньше бывает, но бывают. как пример неудачных tarot 4006 620kv и этот же производитель сделал супер крутые новые martin 4006 320kv
что б диаметр пропов наращивать надо kv ниже. но под подвес оно и не надо. проблем с согласованием вибрации от меньших оборотов вылазит на картинку больше.
на 12 пропах можно с подвесом летать 40мин без проблем, если все подобрано, рама легкая, акум жирный.
Задача хотя бы 15 минут стабильного полета-едет 2D подвес.
думается мне у вас не t-motor пропы. ибо стоят они store-en.tmotor.com/goods.php?id=432
и моторы доверия не вызывают. и регуль 26гр*4=106гр мне не нравится
регуль 13гр на 4 мотора banggood.com/…/Anniversary-Special-Edition-Racerst…
пропы APC 1245 MR www.towerhobbies.com/cgi-bin/wti0001p?I=LXFTMR&P=M…
акум 6600-8000
Пытался задать вопрос на dji клубе, но там народ видимо очень гордый, никто не ответил.
скорее всего там свой протокол связи по шине uart или can. в таком случае подружить его не удастся.
если времени на пробы и ошибок нет, то и брать надо готовый дрон тех же DJI с их же полетником\радиовидеосвязью\подвесом
тот же MATRICE 600PRO
Фото messages
d.radikal.ru/d13/1904/07/c2d4fe89fef3.jpgО чем идет речь?)))
fail safe настроен по уровню значения газа (throttle) и он превышает текущий. надо fail safe настроить на более низкий уровень, который будет при потери связи (если приемник так и делает).
например имеем с включенной апой на выходе приемника уровень 970мс, а при разрыве связи 840мс. вот в этом промежутка ставим настройку fail safe. что б полетник при потери связи или домой летел по GPS или просто сажал.
и с компасом чет не то. надо проверить правильное его расположение в настройках и откалибровать вдали от металлических предметов.
можно запустить без него. квадрик как бы только по гироскопам должен уметь курс держать (с некоторым вращениям по набеганию ошибок на гироскоп).
бывает что и реально чип компаса не фурычит.
если я правильно понял тут он внешний вместе с GPS. по дефолту полетник будет его пытаться включить. иначе использует внутренний. вот запуская с внешним внутренним можно проверить что работает и норм калибруется, а что нет.
Все сбросил и заново перепрошил и компас заработал, но коптер не армится
надо в MissionPlanner глянуть в messages чего он там хочет. толи ему кнопку надо нажать для разблокировки, то ли че нить откалибровать или еще чего.
потом в Full Parameter List есть эта самая настройка ARMING_CHECK
можно ткнуть на цифры откроется окошко с настрйоками вида
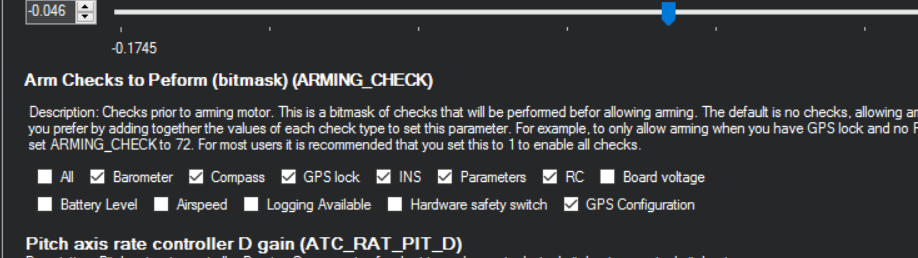
на картинке настройки изза которых не будет армится если ченить с барометром не то, с компасом, спутники не словлены, с акселерометром\гироскопом, с радиосвязью и еще какие то параметры (во всплывающей подсказке инфа есть)
можно вообще все отключить на свой страх и риск, но лучше просто понять че ему там не нравится.
например у меня ругался что на карту памяти не может начать писать логи. отфармотировал карту все заработало и полетел. не нужные мне параметры отключил.
также в Full Parameter можно настроить ПИДы сверх лимитов (есть версии прошивки где диапозон под гоночные) и все остальное.
отдельная тема про APM rcopen.com/forum/f123/topic233564
-в мишен планер и нет кнопки calibration (переустанавливал планер)
последнюю версию MissionPlanner поставьте. и вцелом убедитесь что версии наземного ПО дружат с залитой прошивкой, а залитая прошивка годится для конкретно вашей версии полетника.
Из двух предложенных tarot 4006 620kv более эффективен.
нет. конкретно tarot 4006 620kv редкостное говно. tarot вместо них заказали разработку martin 4006
www.tarotrc.com/Product/Detail.aspx?Lang=en&Id=9e2…
они легче, а момента хватает на 15 пропы и даже 17 для вялых легких коптеров.
складные обычно создают меньше вибраций (если сами по себе отбалансированы и правильно отрегулирован затяг)
ровно обратное мнение. еще и хрен отбалансируешь без стенда.
и на стенде тяжело, так как на низких оборотах могут не строго одинаковые положения пропы занимать +люфты.
по цене цельные вроде как дороже
вот на эти цены погуглите www.tarotrc.com/Product/Detail.aspx?Lang=en&Id=b14… Складные хуже таких же цельных в силу наличия механизма складывания и большего веса.
Смарт порт где вы имеете ввиду отсутствует?
в Turnigy 9XR Pro .
Так как Турниговцам вообще шить эти модули?
я так понял там нет смарт порта для прошивки. я просил друга принести таранис для этих целей.
А можно STL?
Начал печатать, корка реально тонкая. из SBS получается очень хлипкая. Видимо надо ее из ABS печатать. Или в компасе можно задать другую толщину стенок? На фото они явно толще 1мм, как у меня получается.
экономия веса наше все) нижняя часть не хлипкая только после склейки всех частей. верхняя за счет выпуклости. я печатал комплектным с принтером PLA. добрые люди мне напечатали на ABS. выигрыш по массе 20%.
Поделитесь моделькой соеденителя под 16мм? Хочу распечать, попробовать.
файлы под компас 3Д версии 15.2 yadi.sk/d/xXr4_dbIyUyWFQ
1 и 3 деталь печатал вертикально, 2 - горизонтально (отверстие под ось вертикально) чтоб укладываемый пруток обхватывал ось.
ось я в итоге сделал из стального винта М3. концы обмотал угольной нитью (скручивал в нить пучок из ткани 1метр 3мм), смолой склеил, лишнее спилил. Получился не разборный вариант. Для разборного надо трубку вклеивать, усиливать. Без усиления верхнюю петлю оторвет.

ibb.co/yY2g8h1
В любом случае можно доработать, предусмотреть трубки под вал, поднять запас прочности и пр. Поле для творчества.
Продолжение по механизмам складывания по мотивам DJI matrice 210 см.rcopen.com/forum/f123/topic226087/17004
Оригинальные механизмы по слухам от VladZam см.rcopen.com/forum/f132/topic404501/2583 плохи.
Мой крайний вариант в среде моделирования выглядит так:

ibb.co/R4MxHmb
особенности реализации:
1)внешняя карбоновая труба проходит до конца.
2)резьба полная.
3)на краю оранжевой детали есть выемка для обмотки трубы нитями, проклейки смолой.
4)ось я дополнительно обмотал поверх нитями, проклеил смолой (это обязательная процедура, так как конструкция не имеет запаса прочности на петлях. верхнюю петлю просто вырвет за счет рычага).
Сделал на них раму из 16мм и 14мм карбоновых труб. Диагональ 660мм:

ibb.co/cb94yNf

ibb.co/PFmZdsk

ibb.co/hdrBqV0
ноги - стеклопластик длина 220мм даметры внешний 8мм, внутренний 6мм. в них будут антены. Рама+ноги+стопы+мотормаунт + фиксаторы ног на лучах весят около 225гр. При необходимости можно меньше за счет других труб, выкидывания ненужных элементов, оптимизации деталей и подбора материалов.
Основная фишка это обжим труб. Он работает. Запас жескости (во всех направлениях) в разложенном виде креста весьма высок (годится для взлетного веса 4+кг). Вопрос про самооткручивание фиксатора остается открытым. По ощущениям это крайне маловероятно в случае 3Д печати, так как трения и физических неровностей там так много, что пришлось сделать большие по размерам ушки для закручивания руками. Поэтому дополнительных мер пока не выдумываю.
PS фото с котом

ibb.co/dbLCd9p

ibb.co/xCc2mC4
Никита привет. А есть возможность поделиться проектом для печати корпуса
тоже хочу сделать такой на 8" пропах
угу. исходники под САПР Компас 3Д версии 15.2 тут yadi.sk/d/ZzIRsbVP7Hp7Eg
какие комплектующие на на Бангуде покупать чтобы ведущий вел за собой ведомого, вот в чем вопрос.
никакое. что вам толку от комплектующих, если у вас софта нет?
Синхронный полет парой ведущий - ведомый.
модемы + GPS + свой полетик\код. APM\pixhawk используют многофункциональный протокол mavlink, по которому можно рулить внешним устройством, например бортовым компом. вот всякие поделки типо управление по 4G, полеты по камерам, стаей все делается связкой pixhawk+ комп + нужный набор добра и свой софт.
в вашем случае ведомым надо передавать координаты первого и возможно команды. алгоритм все это должен учитывать и стараться держать заданную дистанцию\траекторию движения.
PS атаку стаей прорабатывает все кто может\хочет. вот Российские испытания:
начиная с 1:10
В продолжении сообщения про раму со съемными лучами для замеров эффективности ВМГ в полете см. rcopen.com/forum/f123/topic226087/17194
сделал следующий вариант на ВМГ mavic 1 platinum 8.3 дюйма

ibb.co/866WGwJ
акумы с унифицированным крепежом

ibb.co/6y8p9Kb
антену видеопередатчика просто в отверстие вниз спустил без всякой фиксации. при посадке подгибается.
по весу получилось:
1)тушка со всеми внутренностями 180гр ibb.co/KGf5VcK
не легкая, но тут запас “мощи” под 650 диагональ и крепление акумов весом кг и более. опять же концепция требует да и материалы не все легкие
2)вариант с алюминиевыми лучами с mavic platinum вмг 400гр ibb.co/7gc6Xtx опять же дофига из за концепции
3)взлетный с акумом 3S (хз какой емкости) +377 гр =777гр ibb.co/1bFRffk
не терпелось узнать данные (изза направления пропа и крепления не мог на стенде погонять). первые тесты на 11В ток всреднем 9А.
тут над иметь ввиду видеопередатчик 200мв OCD со старым жрущим чипом и пр.
при делении на 4 получаем эффективность 7.85 гр/вт что впринципе сопоставимо с данными для 8-х пропов например uav-en.tmotor.com/html/uav/html/2018/…/49.html
за вычетом 6.6вт потребления на земле получил 8.35
PS моторы ощутимо греются. похоже для них эти пропы предельно допустимые.
Как заставить работать по PPM передатчик?
У меня turnigy 9xr pro прошивка open tx 2.2.1
Полноценно работают протоколы xjt и r9m.
При переключении на PPM вначале связь сохраняется, но после выключения аппы и включения, связь не устанавливается. Смена протокола на xjt и r9m восстанавливают связь.
Какая прошивка на передатчике не помню. Задача вообще заводить его от arduino(на stm своя аппа). у меня есть работающий код для SBUS и PPM. Другой передатчик (open LRS) от ppm норм работает. В идеале, конечно, найти код для генерации r9m.
Щас уже наверно можно DJI Osmo Pocket цеплять вместо целого коптера.
именно так. как выпустили, я долго искал у кого получился приемлимый результат. на гоночных у одного товарища никак с вибрацией не получалось.
пока у японца нашел
завал горизонта в поворотах, так как ему то полетник не шлет данные для коррекции центростремительного ускорения.в остальном норм.
мне такое и в голову бы не пришло цеплять дрон вместо камеры ))
это вы не тратили несколько лет жизни в попытке сделать
rcopen.com/forum/f123/topic466170
единственный более менее результат в 54мин
у SergejK rcopen.com/forum/f123/topic466170/779
не на 15тых, а на 10дюймовых пропах.
а проблема в том что на больших пропах и малой нагрузке частота вращения и амплитуда критично влияет на съемку экшенкамер
всякого типа виброразвязка либо убирает мелкую вибрацию но пропускает большие колебания, либо наоборот
если пропы большие то и масса должна быть большая и инерция здоровая
тогда проблем нет.
если пропы мелки обороты высокие проблем нет.
а тут проблема. но есть читерные методы в виде цифровой стабилизации и других коррекций картинки
вида
у DJI подобные технологии да и просто крутые подвесы в наличие.
самодел и рядом не стоял. вот и цепляю.
Мавик там зачем? В качестве камеры что ли?Для изоляции как раз используется лак для тяжелых условий а не нахлабучка сверху. Изучите практику автомобильной электроники тех же мозгов управления двигателем = лак и герметик. Я как раз работаю с изоляцией электроплат которые относятся к автомобильной оптике, там частая проблема конденсата и выхода из строя плат управления светодиодами. Вместо того что бы сопротивляться, лучше прислушайтесь.
мавик прст так. хотел максимально долгое видео 4К записать. но лень победила.
лаком пользуемся. и не только лаком. и воском и виксинтом и даже акумуляторы герметизируем в одном месте твердым двухкомпонентным компаундом в другом мягким и корпуса с герметизаций, когда надо . тогда, когда есть цели и задачи. там где надо.
воск пускаем на датчики, которые могут не пройти отбор для работы в диапозоне -40+50гр. что б отпаять потом не мудохаясь с герметиком.
dviglo, антенна сверху. не гоже что б вода текла по всем разъемам, платам, датчикам пр начинке. там mavic air так то. камера в моих задачах всегда смотрит вниз, а аппарат висит в горизонте. в руки такие аппараты не сажают. а в лужи, траву и снег это запросто. антены диполь 433 мгц это усы общей длиной 32см вверх и вниз смотрят. сейчас на 915мгц 2 в горизонте под углом 90гр. потом снова будет вертикально в ногах 17см.