Полетные контроллеры Matek Systems

Доброго дня всем!
пришел CTR, прошил, подключил приемник, камеру, передатчик, GPS. Настроил.
Через пару дней комп перестал видеть ПК. При включении в кнопкой boot, судя по СД, режим переключается, но INAV так и не видит ПК.
Грешил на драйвера, но BF и CF видят другой ПК.
Судя потому, что видеотракт, вкл.OSD работает - ПК работает, но как настраивать?
Куда копать?
У меня оба-два ПК это 405 и 722, однако на каждый пришлось ставить драйвера, т.е. если на один поставил это не значит что и второй автоматом заработает. На сайте Матек говорится, что если по КОМ порту не коннектится, то надо установить это
-
STM32 Virtual Com Port driver X64 у меня Виновс 10 при подключении начал искать драйвера в интернете и установил для DFU бутлоадёра , но я через
- Zadig 2.3 переустановил. А после установил драйвера на виртуал порт по первой ссылке и всё законнектилось для ДФУ и по виртуальному КОМпорты увиделись. На Виндовс 7 было потруднее, тка , например, при установке ДФУ драйвера параллельно с ним появилось новое устройство какой-то памяти - я это устройство отключил с унинстайлом его драйверов и сделал переустановку драйверов как писал выше.
Может поможет эта статья blog.rcdetails.info/rukovodstvo-kak-ispolzovat-bet… это в Бетафлай, но по аналогии может прокатит и для инав?
Спасибо, дело проще оказалось… его еще в настройках включить надо было. 
Кто подскажет gps от naza будет работать с этим полетником?
Должен работать. Тот же чип NEO (для NAZA, единственное, с буквой Q (практически то же самое, что и распространенный М).
Провода только не перепутать при подключении.
Кто-нибудь на Аллиэкспрессе покупал? Оригинальные?
На барахолке не пробовали поискать? Может быть кто продает?
На форуме, вроде нет ничего. По поводу расположения, контроллера …его можно развернуть стрелкой в бок? В инаве, можно настройки менять?
Никогда не приходилось, всегда выставлял по стрелке, но, на сколько помню, для GPS нет такой опции…
Контроллер можно устанавливать в любом направлении. Только нужно во вкладке Configuration в разделе Board and Sensor Alignmen указать угол поворота по YAW. Правильность угла поворота можно проверить во вкладке Setup. Там визуальная модель коптера. Повращайте его. Визуальная модель должна полностью повторять положение коптера при наклонах. GPS пофигу какой стороной он повернут. Но в модуле с GPS может находиться компас. Вот его и нужно правильно направить. Если неудобно установить стрелкой вперед. Можно повернуть на угол кратный 90.
Посмотрите внимательно видео по настройке. В нем подробно разжевано про угол установки полетника и компаса.
Про компас с 20 минуты.
А я про GPS…
Там же… Видео состоит из двух частей. Первая базовые настройки чтобы коптер адекватно летал. Тоже самое что и для Betaflight. Вторая часть с 20 минуты про настройку навигации: компас и GPS. Внимательно посмотрите и вопросов по базовым настройкам Inav больше не будет. Сам три раза пересматривал)))
В настройках GPS вроде бы только склонение выставляется. А как антенна установлена по отношению к ЛА, похоже, не имеет значения…
Только зачем тогда стрелку на антенне рисуют…?
Только зачем тогда стрелку на антенне рисуют…?
Стрелку рисуют если в модуле GPS есть компас. Ещё бывает в стандартный корпус со стрелкой китайцы пихают GPS без компаса.
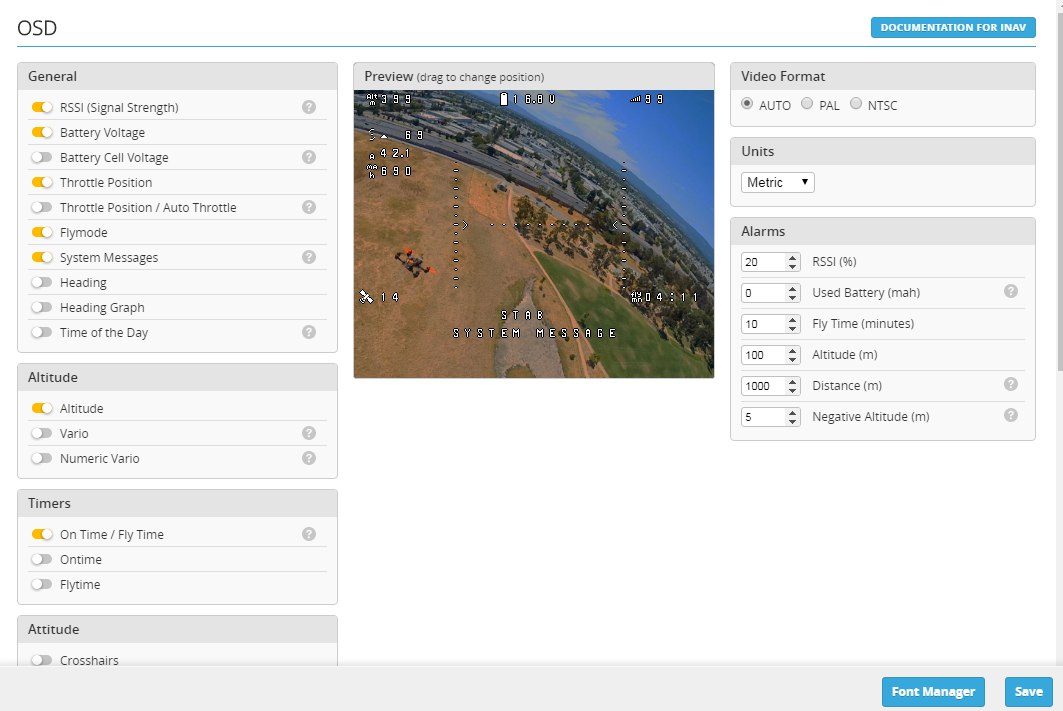
Товарищи , осд какие параметры отображает? Кто может скинуть скрин?
скрин

gps от naza будет работать с этим полетником?
Провода только не перепутать при подключении.
Отсюда вопрос, как подключить Назовский модуль к Матеку… у Назовского выходит 4 провода, а нужно 6, если я правильно понимаю… питание, GPS, компас.
6 - это с компасом. 4 - без компаса.
GPS нормально работает без компаса, да и проблем меньше с его отсутствием.
Полистайте вот ещё ветку, если не смотрели. Может что полезное найдете: rcopen.com/forum/f123/topic287781
Помогите соединить F4 OSD с LED WS2812B все от матека
Хочу подключить в режиме FC, подключаюсь как указано на картинке: подключаю питание, щелкаю кнопкой пока не перестанут гореть светодиоды - это переход в режим FC, долго удерживаю кнопку нажатой - типо сохранение, контакт DIN- паяю на контакт LED пк. Подключаюсь к бетафлаю, в конфиге включаю лед трип, сохраняю, на вкладки лед настраиваю свечение диодов, давлю сейв, но диоды не стали гореть (хотя на ютубе на видео видно что при нажатии сейв светодиоды сразу начинают светится, как выставлено в настройках), передергиваю питание - диоды загораются как настроено, хотя тоже криво как то - на арм и на повороты не реагируют. Отключаюсь от БФ . Включаю пульт, коптер - диоды не горят. подключаюсь к БФ пердергиваю питание на коптере - диоды горят. Такое впечатление что LED панель всегда в режиме ХТ. Где я делаю неправильно или что то пропускаю?
Выручайте, так и не получается ничего. Режим FC - это управление диодами с полетного контроллера, XT- это когда сам задаш цвет и режим свечения.
как подключить Назовский модуль к Матеку…
Как обычный… Сигналы компаса и ЖПС в назовском модуле смешаны и закодированы а прошивка полетника умеет это дело раскодировать… Надо только указать в конфигураторе, что Вы назовский модуль подключили.
Ух ты. Не знал… думал они коннекторами тока отличаются…